软件架构
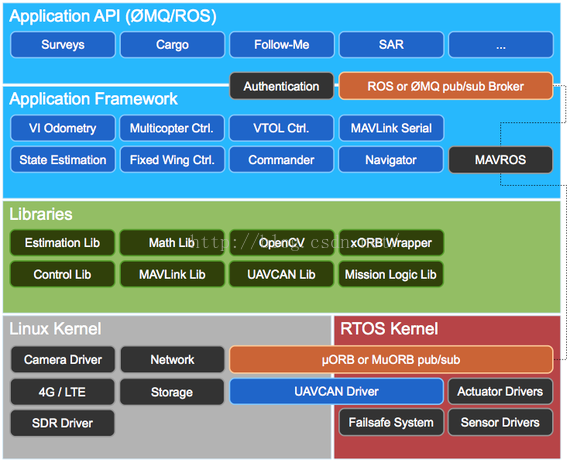
PX4 在广播消息网络内,按照一组节点(nodes )的形式进行组织,网络之间使用像如“姿态”和“位置”之类的语义通道来传递系统状态。软件的堆栈结构主要分为四层:
- 应用程序接口:提供给app开发人员,使开发人员可以使用ROS 或者DroneAPI。这一接口设计尽可能简洁和扁平,并尽量多的隐藏复杂性。
- 应用框架:这是一组核心缺省应用程序(节点),运行核心的飞行控制。
- 函数库:这一层包括针对机器核心操作的所有系统函数库和功能
- 操作系统:最后一层,提供硬件驱动、网络通信、UAVCAN和故障安全(failsafe)系统。
内部进程通信(Inter ProcessCommunication,IPC)
PX4 平台的封装提供了跨平台的无锁发布 -订阅模式( publish–subscribe pattern) 对象请求处理器。取决于平台/操作系统,完成这个的后端可能是uORB,或者Linux上的ROS / DDS (data delivery service)。封装可扩展,也可作为消息系统提供支持,比如ØMQ 。所有这些后端的共同特点是,它们都允许发送数据到一个像如“位置”这样的语义订阅主题(topic),并使多个接收器跨进程的收到这一数据。
IPC性能
发布(Publication)到订阅(subscription)之间的延迟:
- uORB: 23 us @ 168 MHz STM32F4
- ROS: TBD
- ROS2 / DDS: 185 us @ 1.6 GHz IntelPentium 4 and 2 GB RAM running Windows XP (details)
- ZeroMQ: 170 us @ 1.6 GHz IntelPentium 4 and 2 GB RAM running Windows XP (details)
安全和保护模型
飞行核心与主要应用级处理过程隔离,以确保独立于高层级系统状态的机器核心操作,保持稳定。
PX4应用程序框架
PX4应用程序框架在所有平台上代码兼容,(比如 Pixhawk / NuttX,又比如, SnapDragon / Linux),独立并将中间设备作为传输层。

节点句柄(Node Handle)
节点句柄是每一个连接到中间设备的发布器(publisher)或者订阅器(subscriber)的核心数据结构(一个节点可以同时是发布器和订阅器)。一个节点是一个逻辑单元,每一个进程都可以有多于一个的节点(虽然这并不是典型的形式)。
px4::NodeHandle n();
数据结构
对于所有相关的中间设备实现,PX4根据储存在“msg”中的定义文件自动生成据结构。
发布(publication)
通过使用节点句柄通告(advertise)订阅主题( topic)来创建一个新的发布(publication)。注意这个模板,是订阅主题的数据结构。
px4::Publisher<px4::px4_rc_channels>* rc_channels_pub = n.advertise<px4_rc_channels>()
从这个指向 rc_channels_pub 的句柄的指针,可以用于发布数据
-
px4_rc_channels rc_channels_msg;
-
rc_channels_msg.data().timestamp_last_valid= px4::get_time_micros();
-
_rc_channels_pub->publish(rc_channels_msg);
订阅(Subscription)
通过订阅一个订阅主题创建一个新的发布。注意模板,是订阅主题的数据结构。使用订阅共有三个选择:
1. 使用订阅主题的句柄,进行手动复制操作。
2. 作为函数的回调(callback),在订阅主题更新时,函数被调用。
3. 作为类方法的回调(相当于函数,但是是C++类型的)
单纯订阅
除非手动调用复制方法,否则数据不会被复制。
-
unsigned min_interval =500;
-
_sub_rc_chan = _n.subscribe<px4_rc_channels>(min_interval);
函数回调
每次订阅主题更新,则'rc_channels_callback_function'被调用。
-
unsigned min_interval =500;
-
_n.subscribe<px4_rc_channels>(rc_channels_callback_function, min_interval);
类方法回调
相当于前面函数的例子。
_n.subscribe<px4_rc_channels>(&SubscriberExample::rc_channels_callback, this, min_interval);
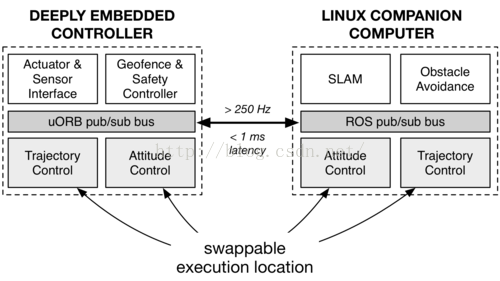
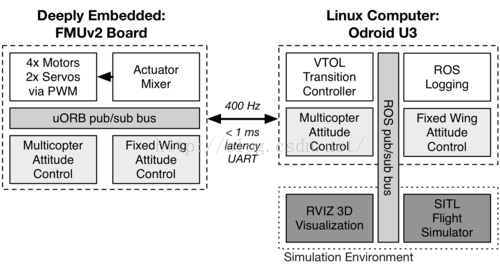
混合系统
为了解决更高级别的挑战,比如基于视觉的避障或者复杂控制问题,一个运行嵌入式Linux的伴随计算机将非常有用。
集成ROS
PX4可以通过两种不同的API与ROS整合到一起:或者自然地将每一个应用作为ROS节点,或者通过mavros在嵌入式自驾仪上唯一地运行
DroneAPI
DroneAPI是一个高级应用程序接口,类似于一个为远程过程调用(RPC)提供语言绑定的函数库。从本质上讲,它是面向告诉无人机去哪里或做什么,而不是核心的机器人通讯/ API的一部分。
参考
如下的同行评审论文描述了更高级的架构:
Lorenz Meier, DominikHonegger and Marc Pollefeys. PX4: A Node-Based Multithreaded Open SourceRobotics Framework for Deeply Embedded Platforms, ICRA (Int. Conf. on Roboticsand Automation) 2015. (to appear)
版权声明:本文为博主[翻译]文章,未经博主允许可以转载,注明博客出处:[http://blog.csdn.net/lkk05]
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)