Laf 公众号已接入了 AI 聊天机器人🤖,支持 GPT、Claude 以及 Laf 专有模型,可通过指令来随意切换模型。欢迎前来调戏👇
❝
本文转自博客园,原文:https://www.cnblogs.com/charlieroro/p/17379469.html,版权归原作者所有。欢迎投稿,投稿请添加微信好友:cloud-native-yang
本文最终的解决方式很简单,就是将现有卷升级为支持更高 IOPS 的卷,但解决问题的过程值得推荐。
我们的团队看管着大约 30 套自建的 Kubernetes 集群,最近需要针对 etcd 集群进行性能分析。
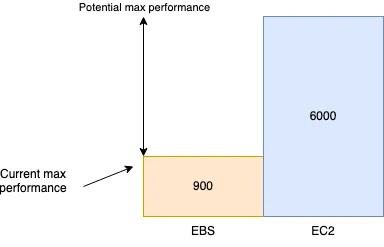
每个 etcd 集群有 5 个成员,实例型号为 m6i.xlarge,最大支持 6000 IOPS。每个成员有 3 个卷:
root 卷
write-ahead-log 的卷
数据库卷
每个卷的型号为 gp2,大小为 300gb,最大支持 900 IOPS:
测试写性能
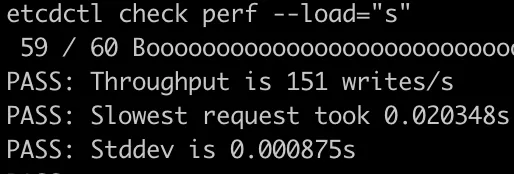
首先 (在单独的实例上执行) 执行 etcdctl check perf 命令,模拟 etcd 集群的负载,并打印结果。可以通过--load 参数来模拟不同大小的集群负载,支持参数为:s(small), m(medium), l(large), xl(xLarge)。
当 load 为 s 时,测试是通过的。
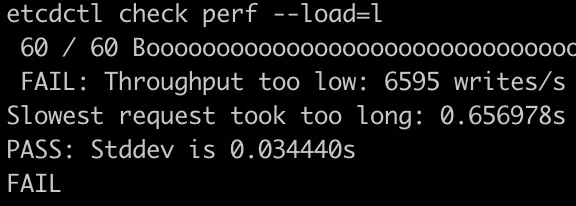
但当 load 为 l 时,测试失败。可以看到,集群可执行 6.6K/s 的写操作,可以认为我们的集群介于中等集群和大型集群之间。
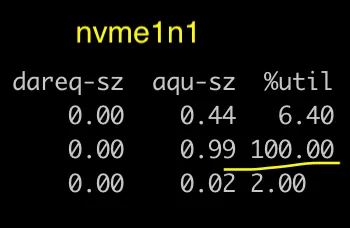
下面是使用 iostat 展示的磁盘状态,其中 nvme1n1 是 etcd 的 write-ahead-log 卷,其 IO 使用率已经达到 100%,导致 etcd 的线程等待 IO。
下面使用 fio 来查看 fdatasync 的延迟 (见附录):
fio --rw=write --ioengine=sync --fdatasync=1 --directory=benchmark --size=22m --bs=2300 --name=sandbox
...
Jobs: 1 (f=1): [W(1)][100.0%][w=1594KiB/s][w=709 IOPS][eta 00m:00s]
...
fsync/fdatasync/sync_file_range:
sync (usec): min=476, max=10320, avg=1422.54, stdev=727.83
sync percentiles (usec):
| 1.00th=[ 523], 5.00th=[ 545], 10.00th=[ 570], 20.00th=[ 603],
| 30.00th=[ 660], 40.00th=[ 775], 50.00th=[ 1811], 60.00th=[ 1909],
| 70.00th=[ 1975], 80.00th=[ 2057], 90.00th=[ 2180], 95.00th=[ 2278],
| 99.00th=[ 2671], 99.50th=[ 2933], 99.90th=[ 4621], 99.95th=[ 5538],
| 99.99th=[ 7767]
...
Disk stats (read/write):
nvme1n1: ios=0/21315, merge=0/11364, ticks=0/13865, in_queue=13865, util=99.40%
可以看到 fdatasync 延迟的 99th 百分比为 2671 usec (或 2.7ms),说明集群足够快 (etcd 官方建议最小 10ms)。从上面的输出还可以看到报告的 IOPS 为 709,相比 gp2 EBS 卷宣称的 900 IOPS 来说并不算低。
升级为 GP3
下面将卷升级为 GP3(支持最小 3000 IOPS)。
Jobs: 1 (f=1): [W(1)][100.0%][w=2482KiB/s][w=1105 IOPS][eta 00m:00s]
...
iops : min= 912, max= 1140, avg=1040.11, stdev=57.90, samples=19
...
fsync/fdatasync/sync_file_range:
sync (usec): min=327, max=5087, avg=700.24, stdev=240.46
sync percentiles (usec):
| 1.00th=[ 392], 5.00th=[ 429], 10.00th=[ 457], 20.00th=[ 506],
| 30.00th=[ 553], 40.00th=[ 603], 50.00th=[ 652], 60.00th=[ 709],
| 70.00th=[ 734], 80.00th=[ 857], 90.00th=[ 1045], 95.00th=[ 1172],
| 99.00th=[ 1450], 99.50th=[ 1549], 99.90th=[ 1844], 99.95th=[ 1975],
| 99.99th=[ 3556]
...
Disk stats (read/write):
nvme2n1: ios=5628/10328, merge=0/29, ticks=2535/7153, in_queue=9688, util=99.09%
可以看到 IOPS 变为了 1105,但远低于预期,通过查看磁盘的使用率,发现瓶颈仍然是 EBS 卷。
鉴于实例类型支持的最大 IOPS 约为 6000,我决定冒险一试,看看结果如何:
Jobs: 1 (f=1): [W(1)][100.0%][w=2535KiB/s][w=1129 IOPS][eta 00m:00s]
...
fsync/fdatasync/sync_file_range:
sync (usec): min=370, max=3924, avg=611.54, stdev=126.78
sync percentiles (usec):
| 1.00th=[ 420], 5.00th=[ 453], 10.00th=[ 474], 20.00th=[ 506],
| 30.00th=[ 537], 40.00th=[ 562], 50.00th=[ 594], 60.00th=[ 635],
| 70.00th=[ 676], 80.00th=[ 717], 90.00th=[ 734], 95.00th=[ 807],
| 99.00th=[ 963], 99.50th=[ 1057], 99.90th=[ 1254], 99.95th=[ 1336],
| 99.99th=[ 2900]
...
可以看到的确遇到了瓶颈,当 IOPS 规格从 900 变为 3000 时,实际 IOPS 增加了 30%,但 IOPS 规格从 3000 变为 6000 时却没有什么变化。
IOPS 到哪里去了?
操作系统通常会缓存写操作,当写操作结束之后,数据仍然存在缓存中,需要等待刷新到磁盘。
数据库则不同,它需要知道数据写入的时间和地点。假设一个执行 EFTPOS(电子钱包转帐) 交易的数据库被突然重启,仅仅知道数据被 " 最终 " 写入是不够的。
AWS 在其文档[1]中提到:
❝
事务敏感的应用对 I/O 延迟比较敏感,适合使用 SSD 卷。可以通过保持低队列长度和合适的 IOPS 数量来保持高 IOPS,同时降低延迟。持续增加卷的 IOPS 会导致 I/O 延迟的增加。
吞吐量敏感的应用则对 I/O 延迟增加不那么敏感,适合使用 HDD 卷。可以通过在执行大量顺序 I/O 时保持高队列长度来保证 HDD 卷的高吞吐量。
etcd 在每个事务之后都会使用一个 fdatasync 系统调用,这也是为什么在 fio 命令中指定—fdatasync=1 的原因。
❝
fsync() 会将文件描述符 fd 引用的所有 (被修改的) 核心数据刷新到磁盘设备 (或其他永久存储设备),这样就可以检索到这些信息 (即便系统崩溃或重启)。该调用在设备返回前会被阻塞,此外,它还会刷新文件的元数据 (参见 stat[2](2))
fdatasync() 类似 fsync(),但不会刷新修改后的元数据 (除非需要该元数据才能正确处理后续的数据检索)。例如,修改 st_atime 或 st_mtime 并不会刷新,因为它们不会影响后续数据的读取,但对文件大小 (st_size) 的修改,则需要刷新元数据。
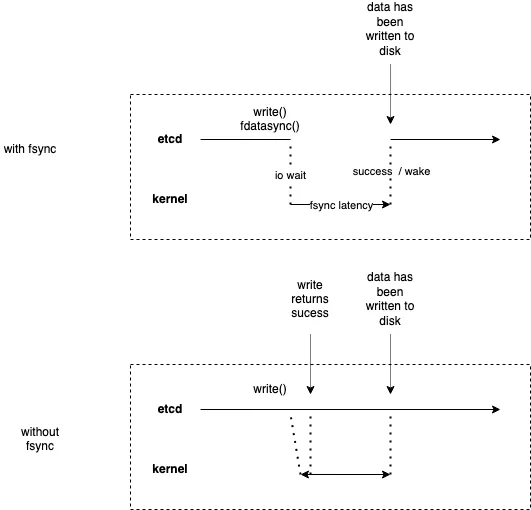
可以看到这种处理方式对性能的影响比较大。
下表展示了各个卷类型的最大性能,与 etcd 相关的是 Max synchronous write:
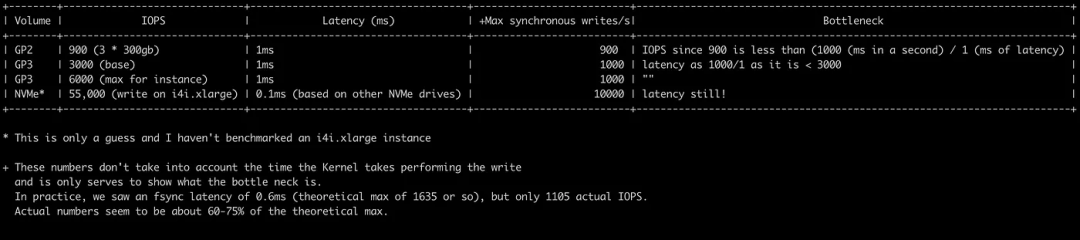
可以看到 etcd 的 iops 一方面和自身实现有关,另一方面受到存储本身的限制。
附录
使用 Fio 来测试 Etcd 的存储性能[3]
etcd 集群的性能严重依赖存储的性能,为了理解相关的存储性能,etcd 暴露了一些 Prometheus 指标,其中一个为 wal_fsync_duration_seconds,etcd建议[4]当 99% 的指标值均小于 10ms 时说明存储足够快。可以使用fio[5]来验证 etcd 的处理速度,在下面命令中,test-data 为测试的挂载点目录:
fio --rw=write --ioengine=sync --fdatasync=1 --directory=test-data --size=22m --bs=2300 --name=mytest
在命令输出中,只需关注fdatasync[6]的 99th 百分比是否小于 10ms,在本场景中,为 2180 微秒,说明存储足够快:
fsync/fdatasync/sync_file_range:
sync (usec): min=534, max=15766, avg=1273.08, stdev=1084.70
sync percentiles (usec):
| 1.00th=[ 553], 5.00th=[ 578], 10.00th=[ 594], 20.00th=[ 627],
| 30.00th=[ 709], 40.00th=[ 750], 50.00th=[ 783], 60.00th=[ 1549],
| 70.00th=[ 1729], 80.00th=[ 1991], 90.00th=[ 2180], 95.00th=[ 2278],
| 99.00th=[ 2376], 99.50th=[ 9634], 99.90th=[15795], 99.95th=[15795],
| 99.99th=[15795]
注意:
Etcd WALs
数据库通常都会使用 WAL,etcd 也不例外。etcd 会将针对 key-value 存储的特定操作 (在 apply 前) 写入 WAL 中,当一个成员崩溃并重启,就可以通过 WAL 恢复事务处理。
因此,在客户端添加或更新 key-value 存储前,etcd 都会将操作记录到 WAL,在进一步处理前,etcd 必须 100% 保证 WAL 表项被持久化。由于存在缓存,因此仅仅使用 write 系统调用是不够的。为了保证数据能够写入持久化存储,需要在 write 之后执行 fdatasync 系统调用 (这也是 etcd 实际的做法)。
使用 fio 访问存储
为了获得有意义的结果,需要保证 fio 生成的写入负载和 etcd 写入 WAL 文件的方式类似。因此 fio 也必须采用顺序写入文件的方式,并在执行 write 系统调用之后再执行 fdatasync 系统调用。为了达到顺序写的目的,需要指定--rw=write,为了保证 fio 使用的是 write 系统调用,而不是其他系统调用 (如 pwrite[7]),需要使用--ioengine=sync,最后,为了保证每个 write 调用之后都执行 fdatasync,需要指定--fdatasync=1,另外两个参数--size 和--bs 需要根据实际情况进行调整。
引用链接
[1]
文档: https://docs.aws.amazon.com/AWSEC2/latest/UserGuide/ebs-io-characteristics.html#ebs-io-volume-queue
[2]
stat: https://linux.die.net/man/2/stat
[3]
使用 Fio 来测试 Etcd 的存储性能: https://www.ibm.com/cloud/blog/using-fio-to-tell-whether-your-storage-is-fast-enough-for-etcd
[4]
建议: https://etcd.io/docs/v3.5/op-guide/performance/
[5]
fio: https://github.com/axboe/fio
[6]
fdatasync: https://linux.die.net/man/2/fdatasync
[7]
pwrite: https://linux.die.net/man/2/pwrite
关于 Laf
Laf 是一款为所有开发者打造的集函数、数据库、存储为一体的云开发平台,助你像写博客一样写代码,随时随地发布上线应用!3 分钟上线 ChatGPT 应用!
🌟GitHub:https://github.com/labring/laf
🏠官网(国内):https://laf.run
🌎官网(海外):https://laf.dev
💻开发者论坛:https://forum.laf.run
关注 Laf 公众号与我们一同成长👇👇👇
