http://wiki.ros.org/geometry_msgs
可以看到不同类型的消息,点击PoseStamped进入PoseStamped message 页面
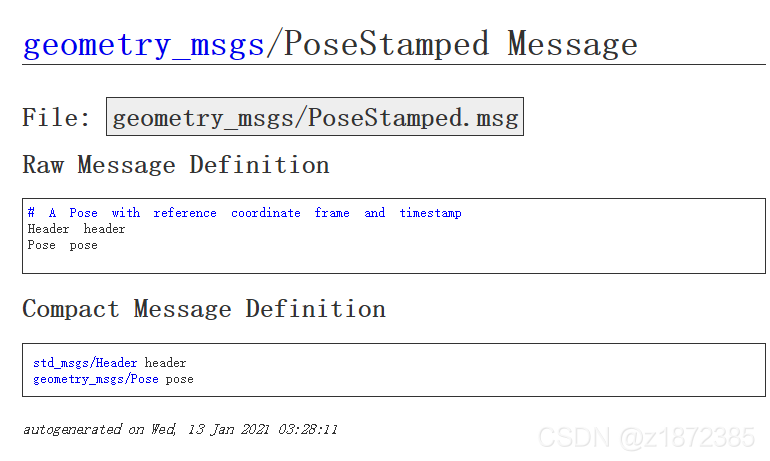
1、通过包含头文件可以调用该类型的消息
#include "geometry_msgs/PoseStamped.h"
2、通过定义msg对象调用数据类型为std_msgs/Header,geometry_msgs/Pose的两个成员header, pose
geometry_msgs::PoseStamped msg
msg.header , msg.pose
点击浅蓝色字体链接进入std_msgs/Header页面
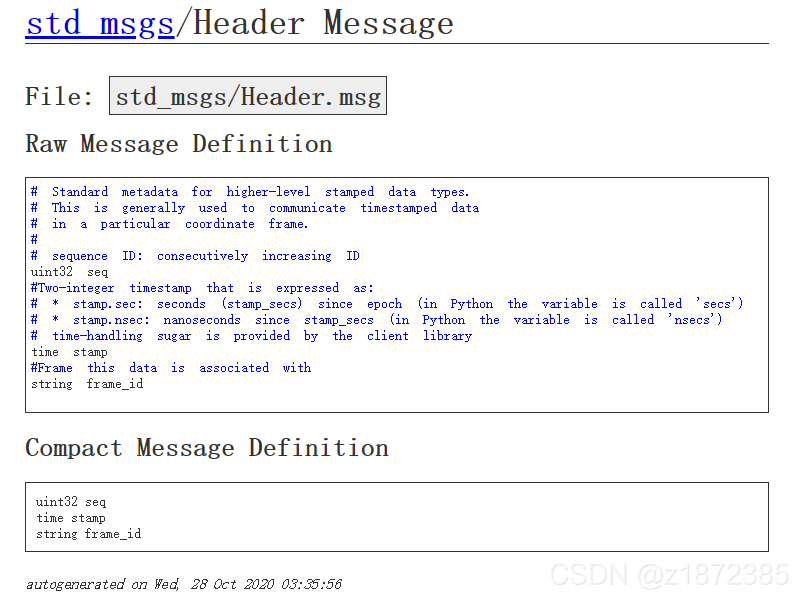
通过Compact Message Definition可以知道,我们通过std_msgs::Header msg_header创建了msg_header类型的对象,就可以通过msg_header.seq调用类型为unit32的成员seq进行赋值或者赋值给其他变量。
int n;
msgs_header.seq = 1;
n = msg_header.seq;
同理可以给msg_header.frame_id赋值string类型的变量
msg_header.stamp.sec得到从epoch开始的秒为单位的时间,msg_header.stamp.nsec得到从stamp_sec开始的纳秒时间
msgs_heder.stamp调用stamp,stamp.sec调用sec得到epoch的时间,那么msgs_header.stamp.sec就可以获取当前的时间,秒为单位
nsec的单位是纳秒,我们要乘以1e-9才能转换为秒,第二行得到的是时间以秒为单位.第四行得到的时间是以ns为单位.
double store_time;
store_time = msg_header.stamp.sec + 1e-9*msg_header.stamp.nsec;
store_time = msgs_header.stamp.sec * 1e9 + msg_header.stamp.nsec;
例 记录时间
geometry_msgs::PoseStamped msg
msg.header.stamp = ros::Time::now()
double store_time;
store_time = msg.header.stamp.sec + 1e-9*msg.header.stamp.nsec;
store_time = msg.header.stamp.sec * 1e9 + msg.header.stamp.nsec;
msg包含数据成员header,而header作为std_msgs/Header的数据成员包含stamp,那么我们可以通过msg.header.stamp调用数据类型为time的成员stamp。ROS可以很方便获取当前时间ros::Time::now(),返回的是time类型的变量.所以可以把当前时间存储在这个message中。
点击浅蓝色字体链接geometry_msgs/Pose
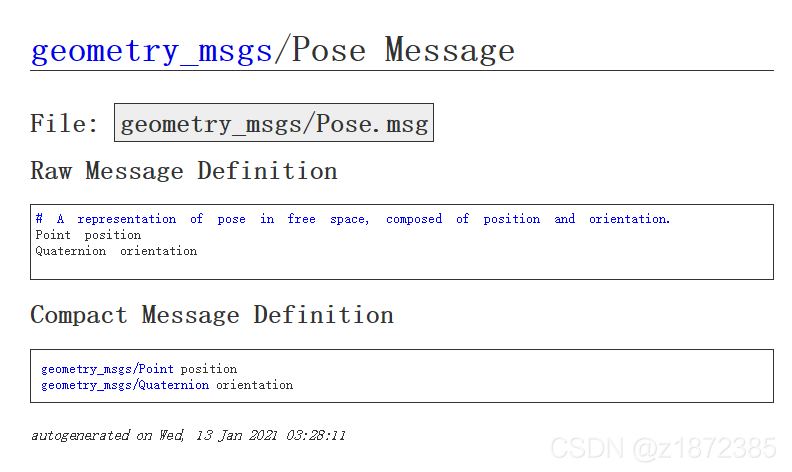
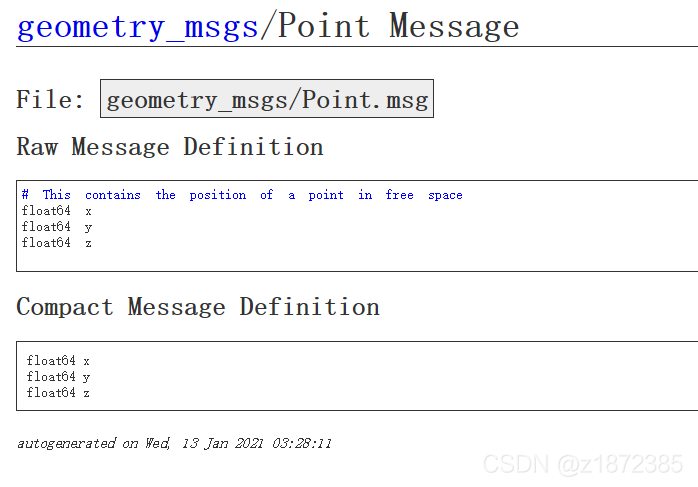
Pose的数据成员是位置和方向position和orientation,geometry_msgs/Point类型的position,含三个float64的变量x,y,z
geometry_msgs/Quaternion类型的’oreintation’,包含四个float64的变量x,y,z,w
和msg.header.stamp.sec调用int32类型的成员sec一样,可以用msg.pose.position.x调用或者赋值float64的成员x
创建一个名字叫pub_poseStamped.cpp的文件
#include "ros/ros.h"
#include "geometry_msgs/PoseStamped.h"
#include <cmath>
int main(int argc, char **argv)
{
ros::init(argc, argv, "talker");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<geometry_msgs::PoseStamped>("chatter", 10);
ros::Rate loop_rate(10);
double positionX, positionY, positionZ;
double orientationX, orientationY, orientationZ, orientationW;
double fixedOrientation = 0.1;
orientationX = fixedOrientation ;
orientationY = fixedOrientation ;
orientationZ = fixedOrientation ;
orientationW = sqrt(1.0 - 3.0*fixedOrientation*fixedOrientation);
double count = 0.0;
while (ros::ok())
{
positionX = count;
positionY = count;
positionZ = count;
geometry_msgs::PoseStamped msg;
ros::Time currentTime = ros::Time::now();
msg.header.stamp = currentTime;
msg.pose.position.x = positionX;
msg.pose.position.y = positionY;
msg.pose.position.z = positionY;
msg.pose.orientation.x = orientationX;
msg.pose.orientation.y = orientationY;
msg.pose.orientation.z = orientationZ;
msg.pose.orientation.w = orientationW;
ROS_INFO("we publish the robot's position and orientaion");
ROS_INFO("the position(x,y,z) is %f , %f, %f", msg.pose.position.x, msg.pose.position.y, msg.pose.position.z);
ROS_INFO("the orientation(x,y,z,w) is %f , %f, %f, %f", msg.pose.orientation.x, msg.pose.orientation.y, msg.pose.orientation.z, msg.pose.orientation.w);
ROS_INFO("the time we get the pose is %f", msg.header.stamp.sec + 1e-9*msg.header.stamp.nsec);
std::cout<<"\n \n"<<std::endl;
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
++count;
}
return 0;
}
给pose的orientation赋值相同的数,机器人就没用旋转
给position赋值相同的递增值,机器人沿着坐标轴对角线匀速直线行驶
再创建一个sub_poseStamped.cpp
#include "ros/ros.h"
#include "geometry_msgs/PoseStamped.h"
void chatterCallback(const geometry_msgs::PoseStamped::ConstPtr& msg)
{
ROS_INFO("I heard the pose from the robot");
ROS_INFO("the position(x,y,z) is %f , %f, %f", msg->pose.position.x, msg->pose.position.y, msg->pose.position.z);
ROS_INFO("the orientation(x,y,z,w) is %f , %f, %f, %f", msg->pose.orientation.x, msg->pose.orientation.y, msg->pose.orientation.z, msg->pose.orientation.w);
ROS_INFO("the time we get the pose is %f", msg->header.stamp.sec + 1e-9*msg->header.stamp.nsec);
std::cout<<"\n \n"<<std::endl;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "listener");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("chatter", 10, chatterCallback);
ros::spin();
return 0;
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)