系列2的主要内容是探讨如何自己构建一个模型并且导入Unity。
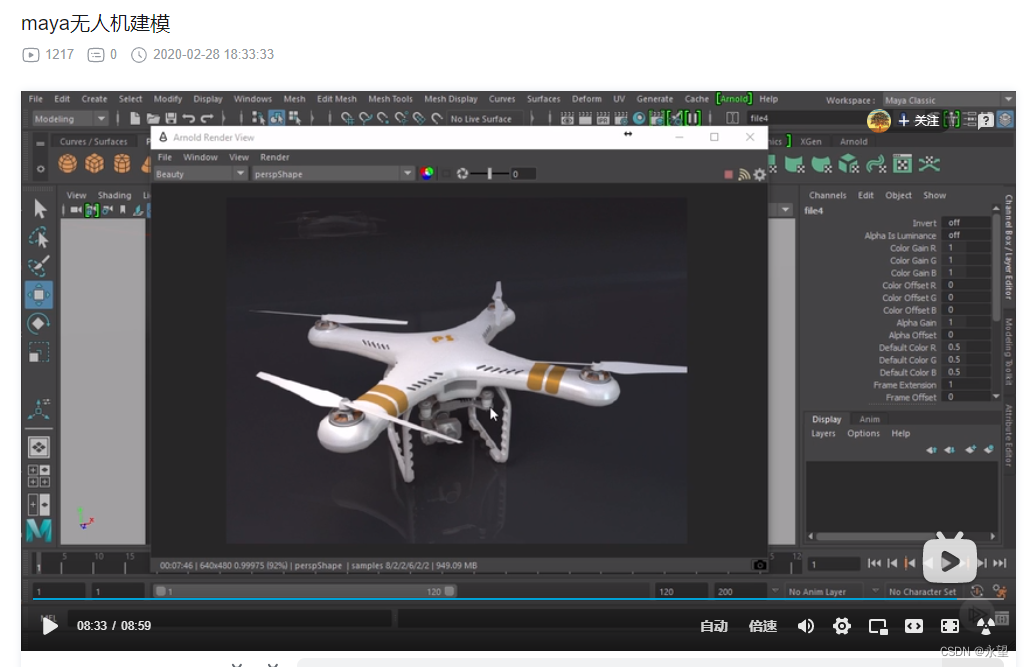
3D仿真与其他类型仿真的一大区别是三维场景和三维模型。为了实现对某个对象的仿真,模型是必须的。当然,针对不同的仿真任务,需要描述对象也是不一样的。但是,一个可视化的三维模型是必须的。比如,通过三维模型观测无人机的运行情况,当前的姿态信息等待。Unity是一个游戏引擎,其运行是依赖脚本的生命周期,侧重在于特定功能(人物行走、环境探测)的实现,而在三维模型构建方面相对较弱。不过可以利用所提供的渲染引擎直接生成模型的点、面、法线等,进而实现动态的模型构建。但是这对于使用者而言,需要熟悉整个渲染管线、模型渲染过程。这无疑增加模型构建的难度,而且在实际中,我们需要构建的物体模型大多数是静态的。这里的静态指的是模型的形状规格、表面材质。而模型的动作、行为,我们可以利用脚本编程实现。比如,我们可以利用Rotate()实现螺旋桨的旋转。利用专业的建模软件去构建指定对象的模型,之后导入Unity是一个比较好的选择。在这里,展示了利用Maya软件构建无人机的基本模型并且导入Unity。
Rotate()
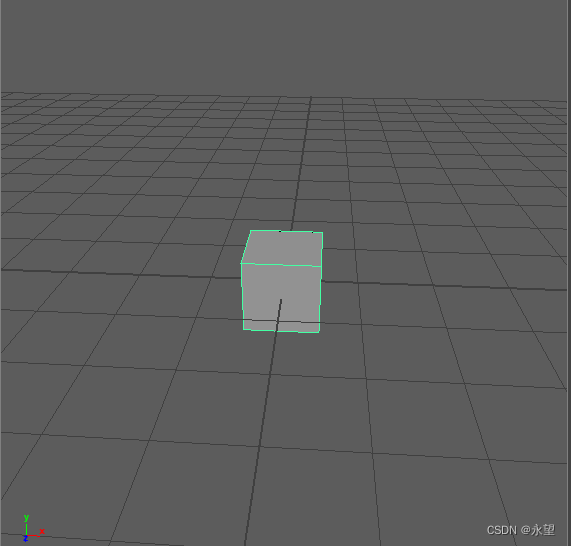
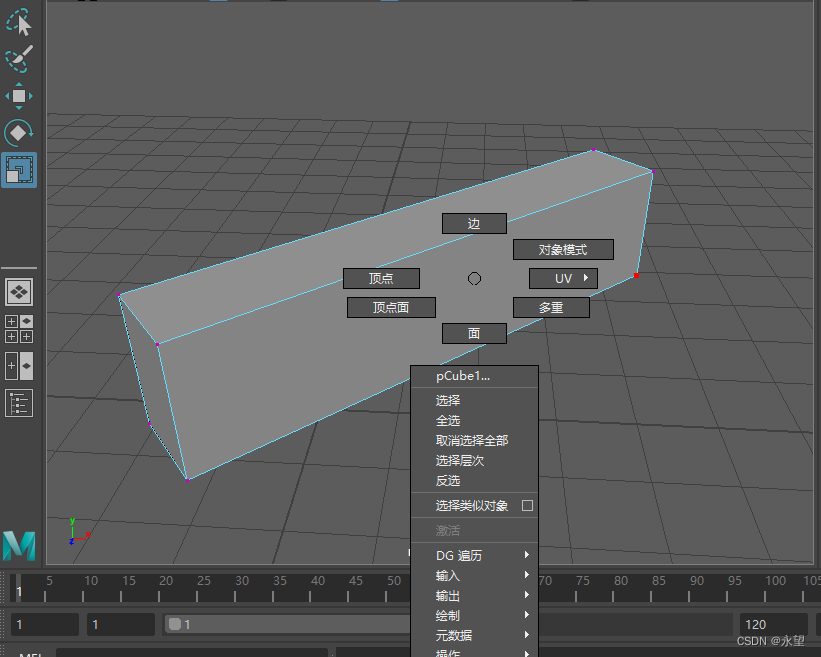
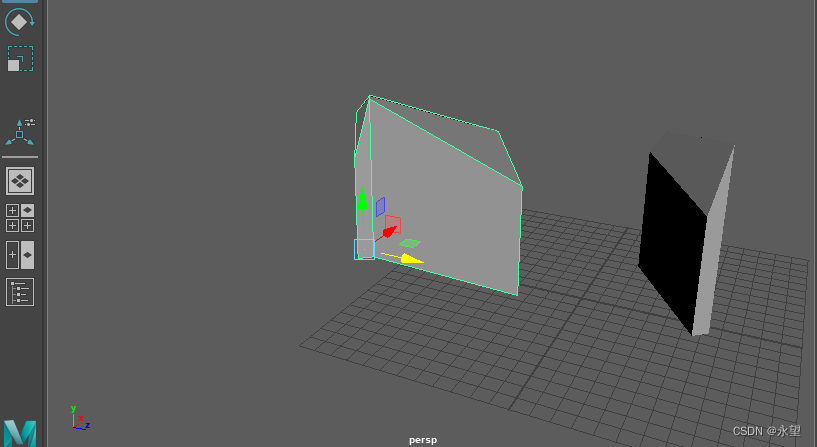
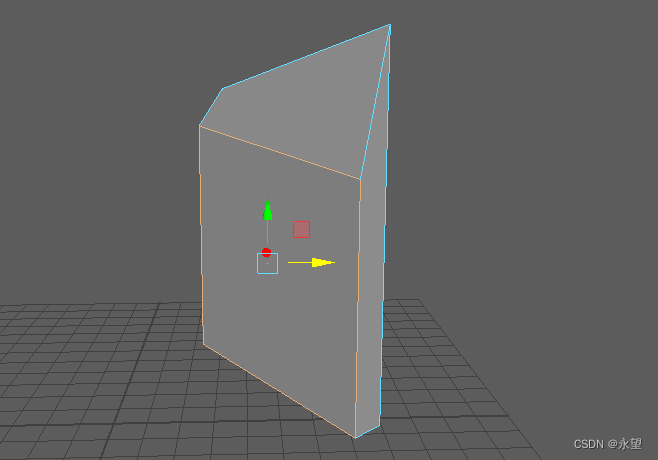
下面简单介绍Maya软件的基本操作,包括创建一个规则物体,并且通过点、线、面操作进行模型形状的修改,最好介绍如何渲染模型。
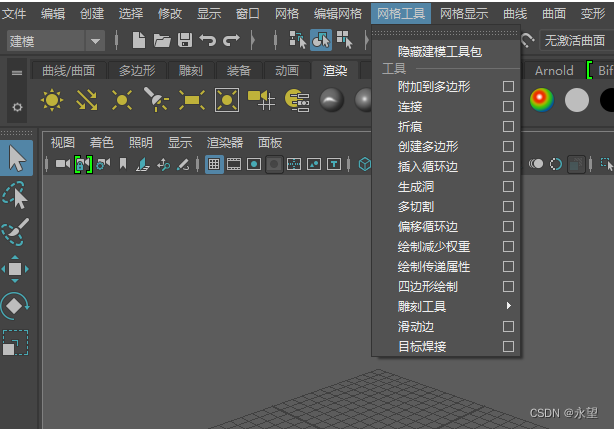
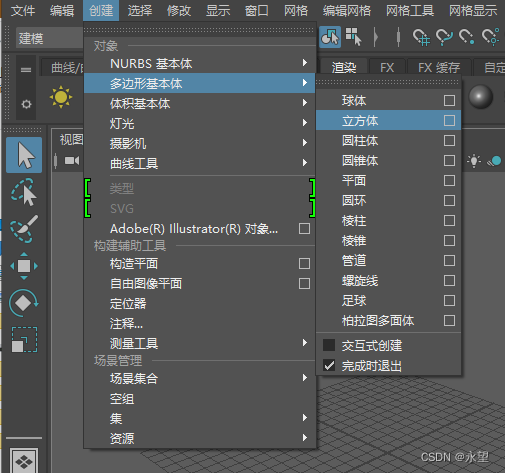
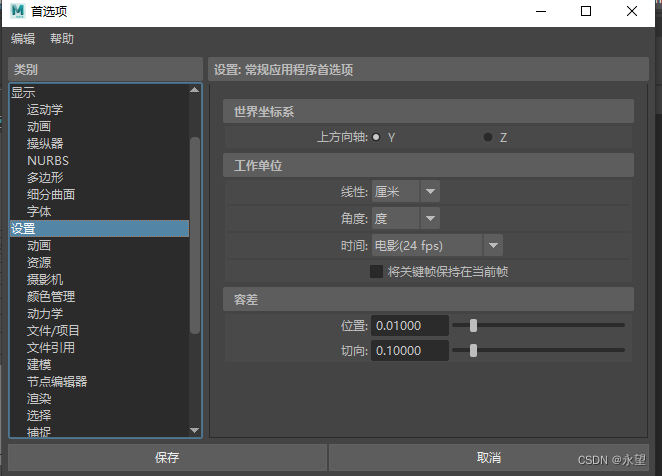
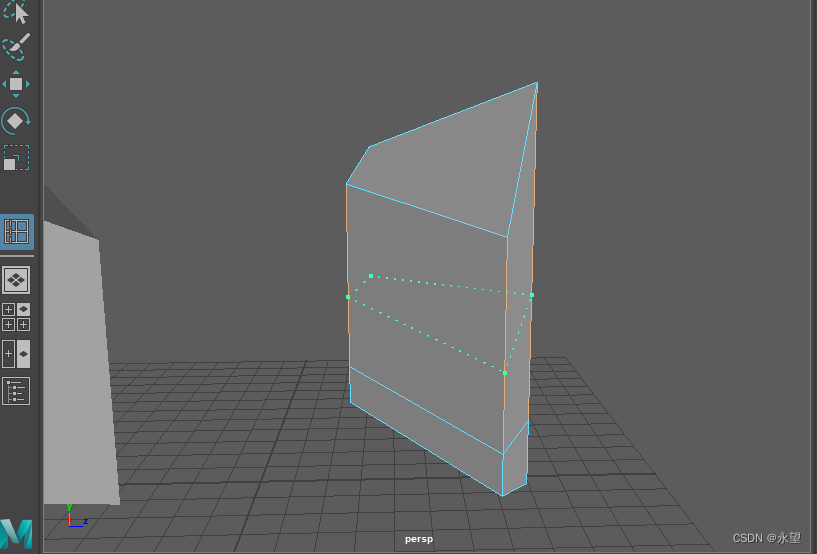
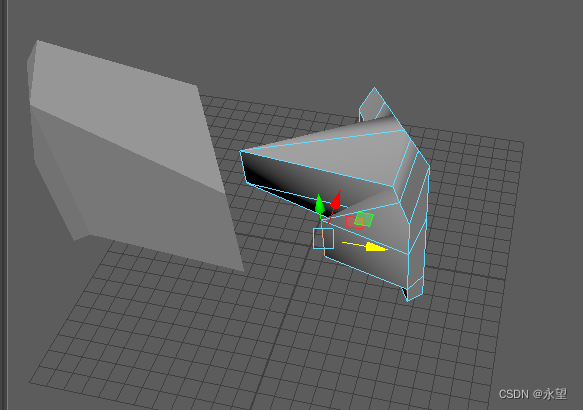
我这里使用的是Maya2017版本,打开后的界面是 基本的模型操作工具(平移、旋转、选择等)是在左边的小栏中 渲染相关的工具,比如灯光、材质、贴图等。 中间一大块就是建模的区域 在“创建”这个工具栏,我们能够创建一些基本的物体,主要用到是多边形基本体。一个完整的无人机模型是通过这些多边形基本组合而来。 在“修改”这个工具栏,经常用到的工具是冻结变换。主要是将子物体的坐标系居中,方面旋转和平移。 在“网格”工具栏,主要是拼接两个模型。比如将机臂和机身拼接在一起。也可以从大模型中分离出一些小模型。 在“网格工具”这一部分,“插入循环边”是比较重要,这在模型塑型方面发挥很大作用,比如一些具有特定特征的边缘的构建。 需要更精细化的模型,就需要用到曲线、曲面、UV等工具,但对于无人机仿真,以上工具足够完成一个三维模型的构建。
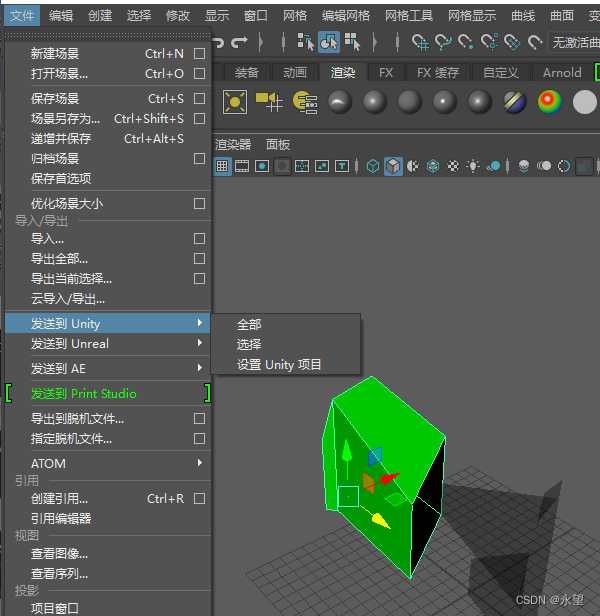
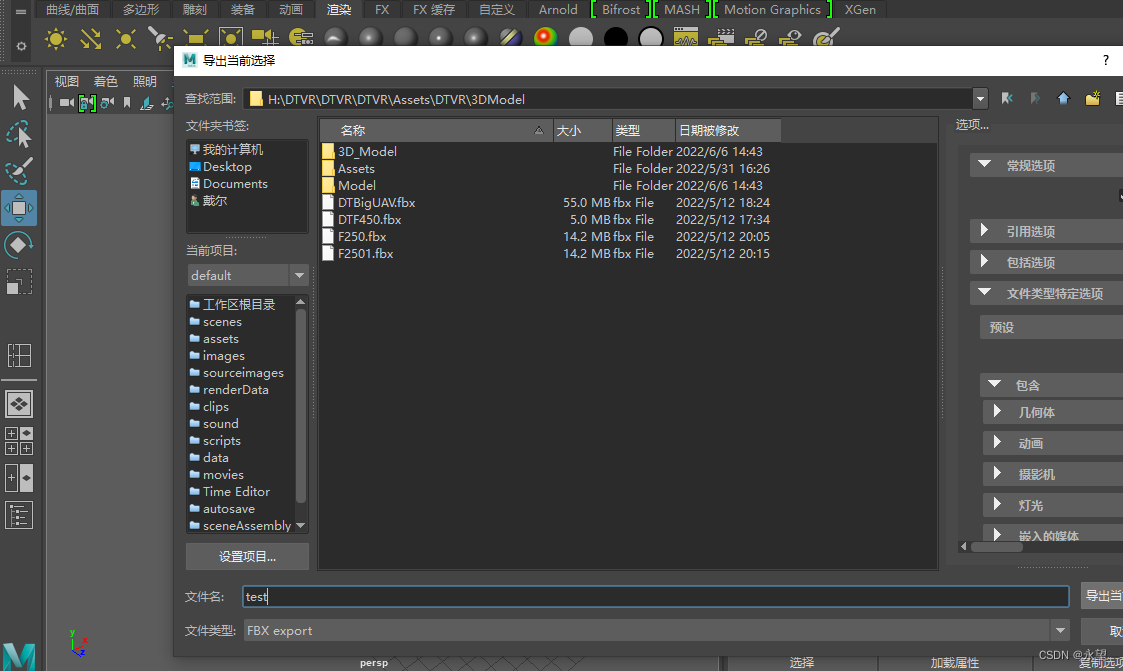
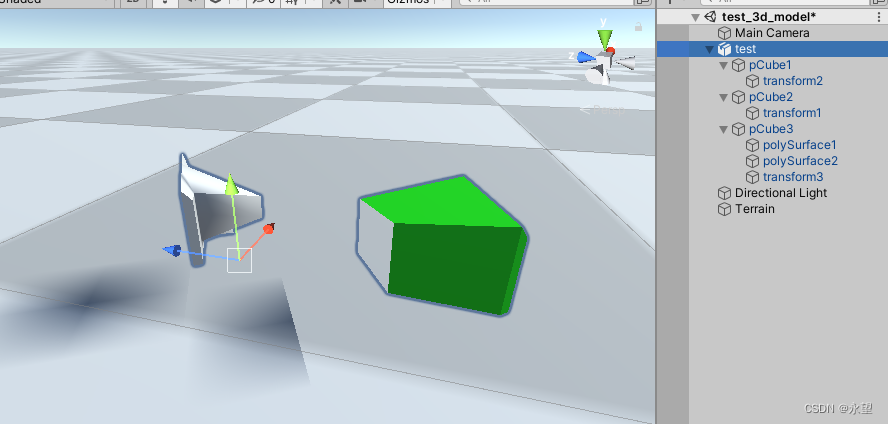
在Maya构建好模型后,我们选中模型,然后点击文件,发送到Unity,选择Unity的工程路径,备注模型的名字,确定后,模型就导入Unity。Unity中模型文件是fbx格式,当前Maya文件也支持,但是在没有Maya软件的系统中是不能正常显示模型。因为Unity会调用Maya解析模型。所以最好的方法是导出为fbx格式。 在Unity新建一个场景,把模型拉到Scene窗口,就可以显示模型。
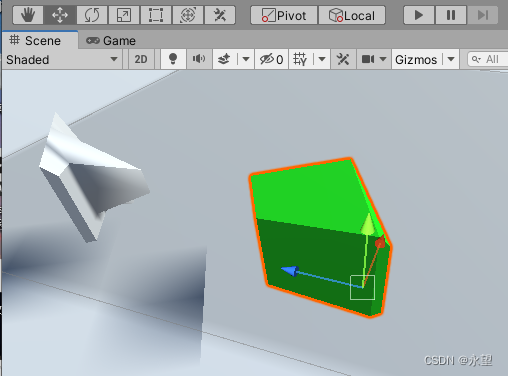
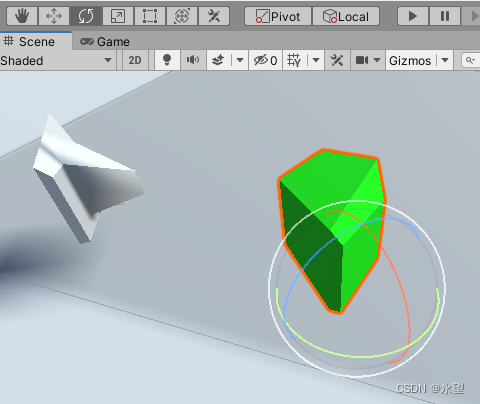
同样在Unity中,我们也能操作模型的移动、旋转、拉伸等。
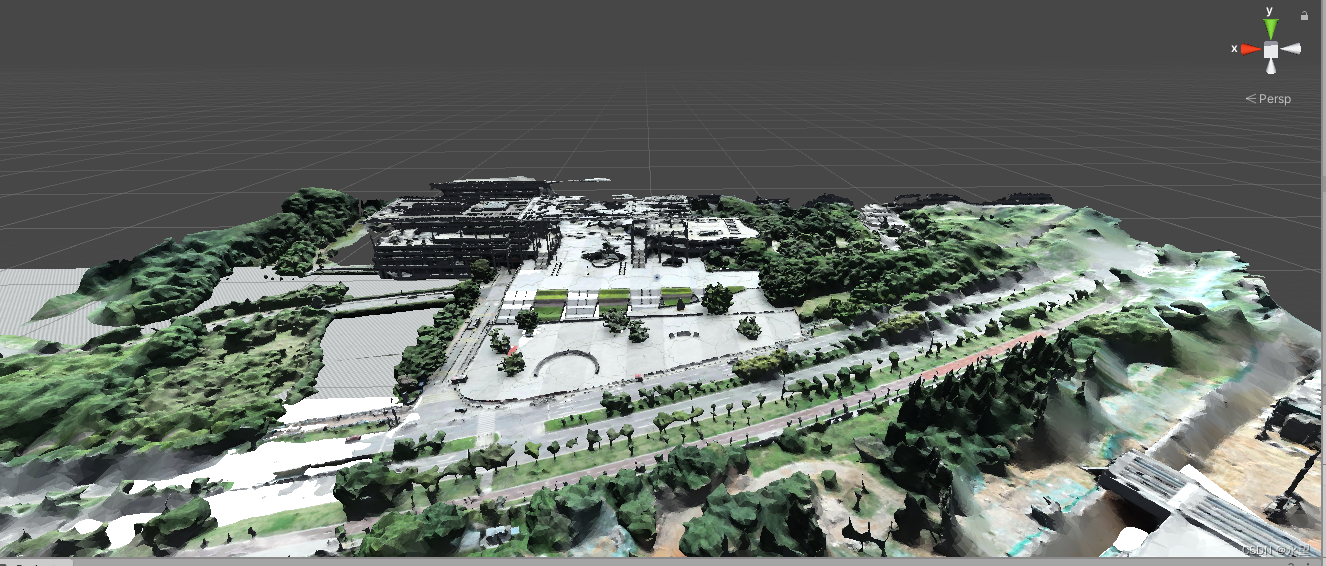
在系列中给出的开源仓库中,我已经将无人机的相关模型上传,放在3D_Model文件夹 另外,也可以导入通过无人机拍摄图片重建出来的模型,下图是导入重建部分环境的地图。如果我们能够对物理环境进行1:1的还原,那么我们可以在虚拟环境中控制物理的无人机。