《Geometrically Constrained Trajectory Optimization for Multicopters》一文由浙江大学博士 汪哲培 2022年发表在IEEE, 涉及到这篇论文地内容,由汪哲培在 Bilibili 做了介绍:论文相关介绍
关于几何约束多旋翼轨迹规划,属于路径规划地后端优化,论文的实验实现比现有的其他路径生成算法的生成速度快一个数量级。具有简洁、高效、非奇异、适用性等优势。
论文中提到的相关工作:微分平坦性(涉及的几篇文献,简要概述)、基于采样的运动规划(PRM和RRT的发展)、基于优化的路径规划(GPOPS-Ⅱ,ACADO)需要很长的计算时间。
MINCO 轨迹类
参数化方式:中间点 q = [ P1,P2,…,P(N-1) ]T 和 T =[ T1,T2,T3,…,TN ]T ,(矩阵转置)
条件:满足起始边界条件,且满足最优性条件的固定段数轨迹。
任意给定参数,MINCO 轨迹的产生为线性复杂度,进一步设计了 MINCO 轨迹类的 Deformation 形变操作。
形变操作: 轨迹类在任意用户需求下的时空变形。
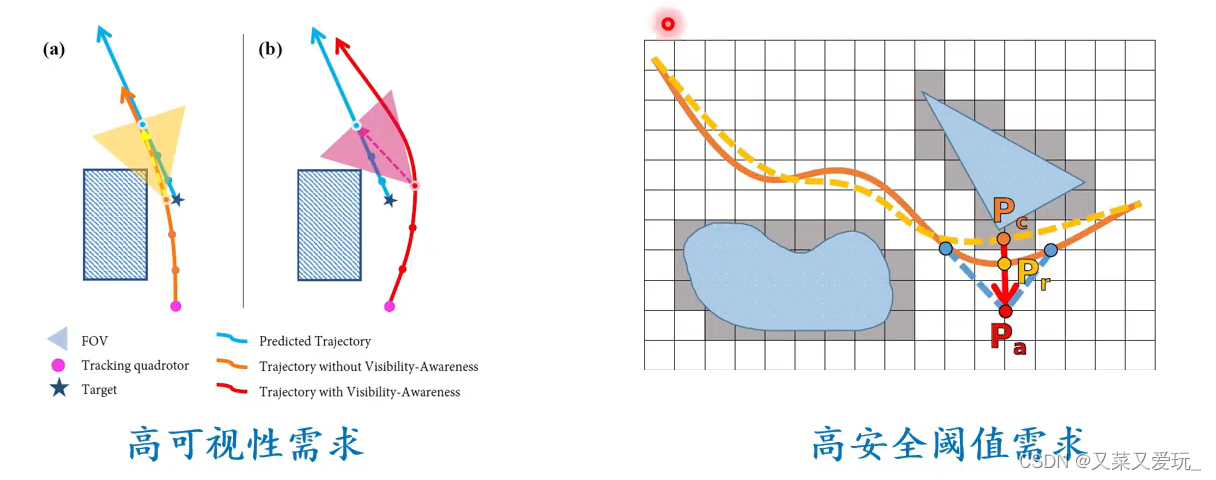
在轨迹优化的时候,经常会碰到 无人机视野被障碍物挡住 的情况,有时候需要做一些视野上的约束,让无人机的视野不被覆盖,既要调整时间又要调整空间。第二个是无人机对安全阈值的需求,虽然原本优化的轨迹没有碰到障碍物,但是在离障碍物太近的情况下,如果无人机受到干扰,或者被风吹一下,就会产生碰到障碍物的紧急情况,在一个较高的安全阈值需求下,就需要把 watpoint 向远离障碍物的方向做相应的形变,对空间进行调整。
所有在轨迹上的需求,均可以优化直接定义在轨迹上的函数 F(c,T) 来实现,对于 MINCO 轨迹,定义:H( q, T ) = F( c(q,T) , T )
几何约束
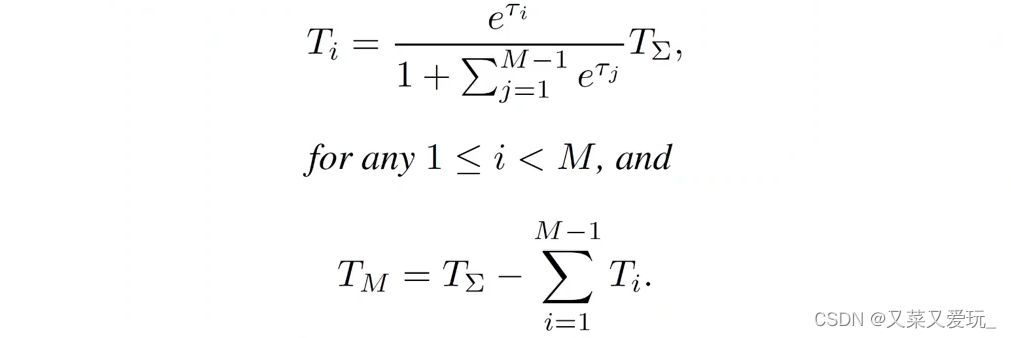
**时间参数上的几何约束:**采用解析的 全局微分同胚 将定义域变换到欧氏空间。

空间上的几何约束: 考虑直接在几何参数下的几何约束,对于 T 而言,目标函数于定义域边界趋于正无穷。对于 q 而言,每一个中间点均被约束在任意一个凸多面体或者球之中。
具有时空变形的MINCO轨迹,在MINCO中,仅用q和T紧凑参数化
在不牺牲可扩展性的前提下,提出了时间积分惩罚函数,将有约束轨迹优化问题转化为可可靠求解的稀疏无约束轨迹优化问题
- 消除时间限制
- 球面空间约束消除
- 多面体空间约束消除
- 时间积分惩罚功能
- 基于无约束NLP的轨迹优化
实验
论文中实现的方法 使用纯C++ 和Eigen 依赖,串行实现,不依赖商用求解器

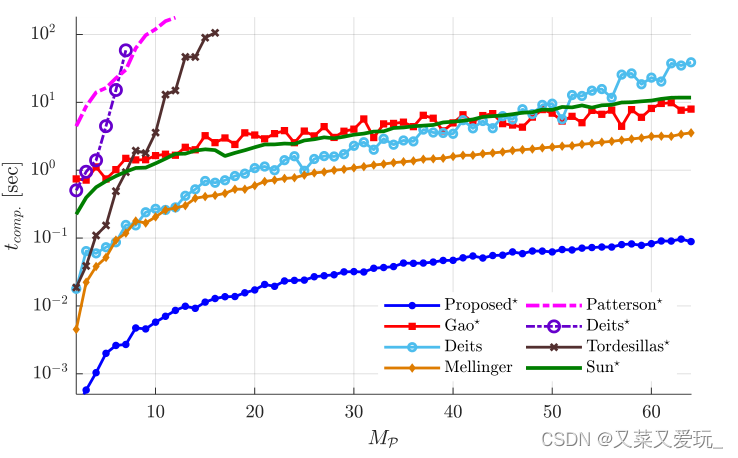
提出的方法比其他的方法快一个数量级,并且在轨迹质量上与求解器求解的轨迹相差不大。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)