
1. 数字(离散)PID控制算法的表达式:
将PID调节器离散化,用差分方程来代替连续系统的微分方程,分为位置式和增量式两类。
重点理解概念如下:
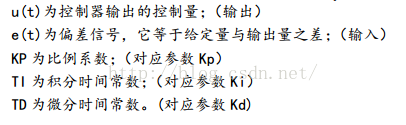
a) 基本偏差e(t):表示当前测量值与设定目标值间的差,设定目标是被减数,结果可为正或负值,正值表示未达到目标,负值表示超过设定值。(代表比例)
b) 偏差和:即每次测量的差值总和,注意正负(代表积分)
c) 基本偏差的相对偏差:即e(t)-e(t-1)用本次的基本偏差减去上一次的基本偏差。(代表微分)
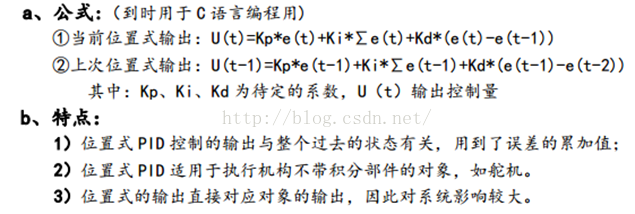
位置式:
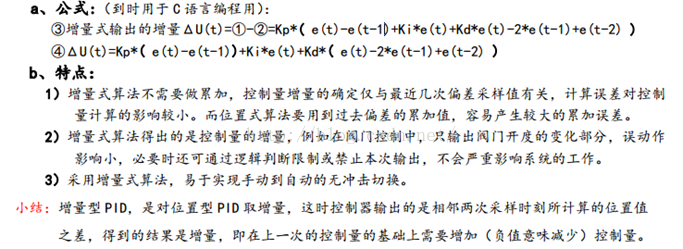
增量式:
位置式和增量式三个参数的作用:
1. Kp参数:能迅速反映误差,从而减小误差,但他不能消除稳态误差,加大Kp还会引起系统的不稳定。
2. Ki参数:只要有足够的时间,积分作用将能完全消除误差。但其缺点积分控制是偏差累积控制,控制作业缓慢,但是如果积分作用太强会使系统的超调量加大,甚至出现振荡。
3. Kd参数:预测误差变化趋势,减小超调量,克服振荡,使系统的稳定性提高,还能加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。
参考代码如下:
/*
位置型pid
*/
#include <stdio.h>
#include<ioctl.h>
struct _pid{
float SetSpeed; //定义设定值
float ActualSpeed; //定义实际值
float err; //定义偏差值
float err_last; //定义上一个偏差值
float Kp,Ki,Kd; //定义比例、积分、微分系数
float voltage; //定义电压值(控制执行器的变量)
float integral; //定义积分值
}pid;
//项目中获取到的参数
void PID_init(){
printf("PID_init begin \n");
pid.SetSpeed=0.0;
pid.ActualSpeed=0.0;
pid.err=0.0;
pid.err_last=0.0;
pid.voltage=0.0;
pid.integral=0.0;
pid.Kp=0.2; //自己设定
pid.Ki=0.015; //自己设定
pid.Kd=0.2; //自己设定
printf("PID_init end \n");
}
float PID_realize(float speed){
pid.SetSpeed=speed; //设定值
pid.err=pid.SetSpeed-pid.ActualSpeed; //设定值-实际值
pid.integral+=pid.err; //积分值,偏差累加
pid.voltage=pid.Kp*pid.err+pid.Ki*pid.integral+pid.Kd*(pid.err-pid.err_last);
pid.err_last=pid.err; //上一个偏差值
pid.ActualSpeed=pid.voltage*1.0; //算出实际值
return pid.ActualSpeed; //返回
}
int main(){
printf("System begin \n");
PID_init();
int count=0;
while(count<1000)
{
float speed=PID_realize(200.0);
printf("%f\n",speed);
count++;
}
return 0;
}
增量式代码:
/*
增量型pid
*/
#include<stdio.h>
#include<stdlib.h>
struct _pid{
float SetSpeed; //定义设定值
float ActualSpeed; //定义实际值
float err; //定义偏差值
float err_next; //定义上一个偏差值
float err_last; //定义最上前的偏差值
float Kp,Ki,Kd; //定义比例、积分、微分系数
}pid;
void PID_init(){
pid.SetSpeed=0.0;
pid.ActualSpeed=0.0;
pid.err=0.0;
pid.err_last=0.0;
pid.err_next=0.0;
pid.Kp=0.2;
pid.Ki=0.015;
pid.Kd=0.2;
}
float PID_realize(float speed){
pid.SetSpeed=speed;
pid.err=pid.SetSpeed-pid.ActualSpeed;
float
incrementSpeed=pid.Kp*(pid.err-pid.err_next)+pid.Ki*pid.err+pid.Kd*(pid.err-2*pid.err_next+pid.err_last);
pid.ActualSpeed+=incrementSpeed;
pid.err_last=pid.err_next;
pid.err_next=pid.err;
return pid.ActualSpeed;
}
int main(){
PID_init();
int count=0;
while(count<1000)
{
float speed=PID_realize(200.0);
printf("%f\n",speed);
count++;
}
return 0;
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)