现有仿真数据集
TartanAir
TartanAir 是一个用AirSim生成的仿真SLAM数据集,可以用于视觉SLAM。
数据集提供:双目 RGB 图像,深度图像,分割,光流,相机位姿和 LiDAR 点云。
论文:TartanAir: A Dataset to Push the Limits of Visual SLAM
数据集地址:https://theairlab.org/tartanair-dataset/
数据集生成方式:

仿真数据采集工具
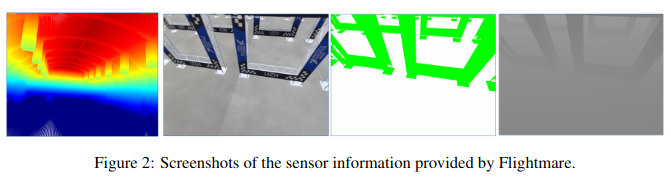
Flightmare
基于Unity构建仿真场景,同时有一个物理引擎,可以仿真无人机运行。与常用的仿真软件对比如下:

Flightmare中可以获取IMU,RGB, Depth,Seg.
论文: Flightmare: A Flexible Quadrotor Simulator
Git: https://github.com/uzh-rpg/flightmare
UnrealCV
基于UE4,可以获取RGB图像,深度图像,语义标签,表面法向量。

论文:UnrealCV: Virtual Worlds for Computer Vision
Git: https://github.com/unrealcv/unrealcv
OmniSCV
提供了一个工具,可以在仿真环境Unreal Engine 4中,生成仿真全景图像。且包含像素级别的语义信息和深度信息。


论文:OmniSCV: An omnidirectional synthetic image generator for computer vision
Git: https://github.com/Sbrunoberenguel/OmniSCV
Apollo Baidu
自动驾驶仿真平台
Nvidia Issac
教程: https://docs.nvidia.com/isaac/isaac/doc/overview.html
Microsoft Airsim
无人机室外场景
Facebook 仿真系统
https://github.com/facebookresearch/habitat-sim
实时性好,没有IMU。
IMU仿真:https://github.com/Aceinna/gnss-ins-sim
其余
Google ROBEL
AWS RoboMaker
ROSbot 2.0
Poppy Project
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)