门店:
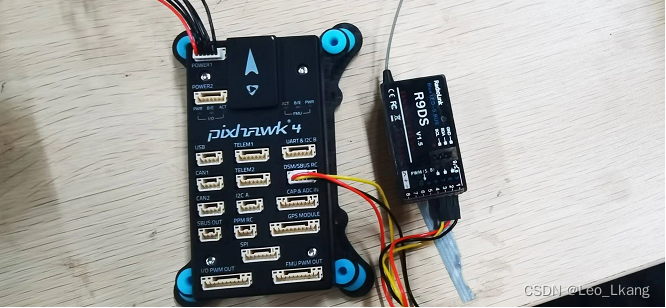
YH远航科技模型(Pixhawk飞控) 新动模型(电机,电调) 相应的电机,电调,机臂的连接 https://m.tb.cn/h.UcqJUyV?tk=Gu7x2xdmO4g https://m.tb.cn/h.UcqKqIH?tk=vL7t2xdly3d https://m.tb.cn/h.U1E0Oag?tk=jGMT2xdOL6f
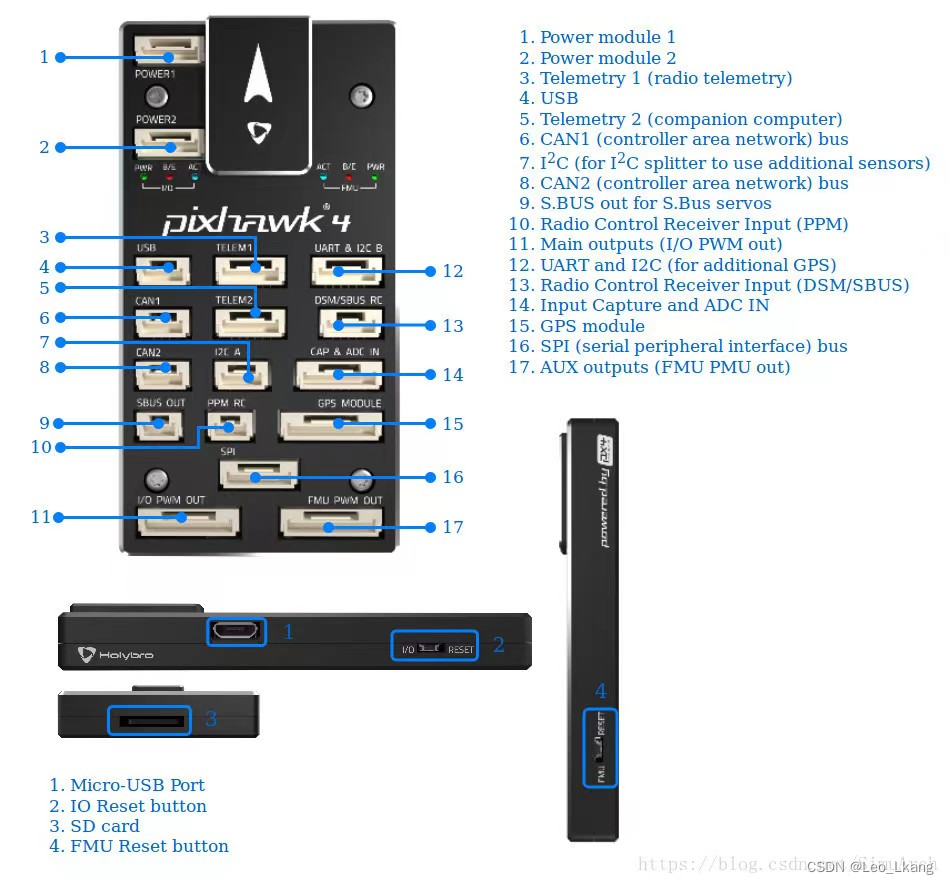
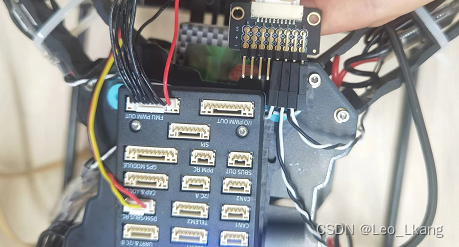
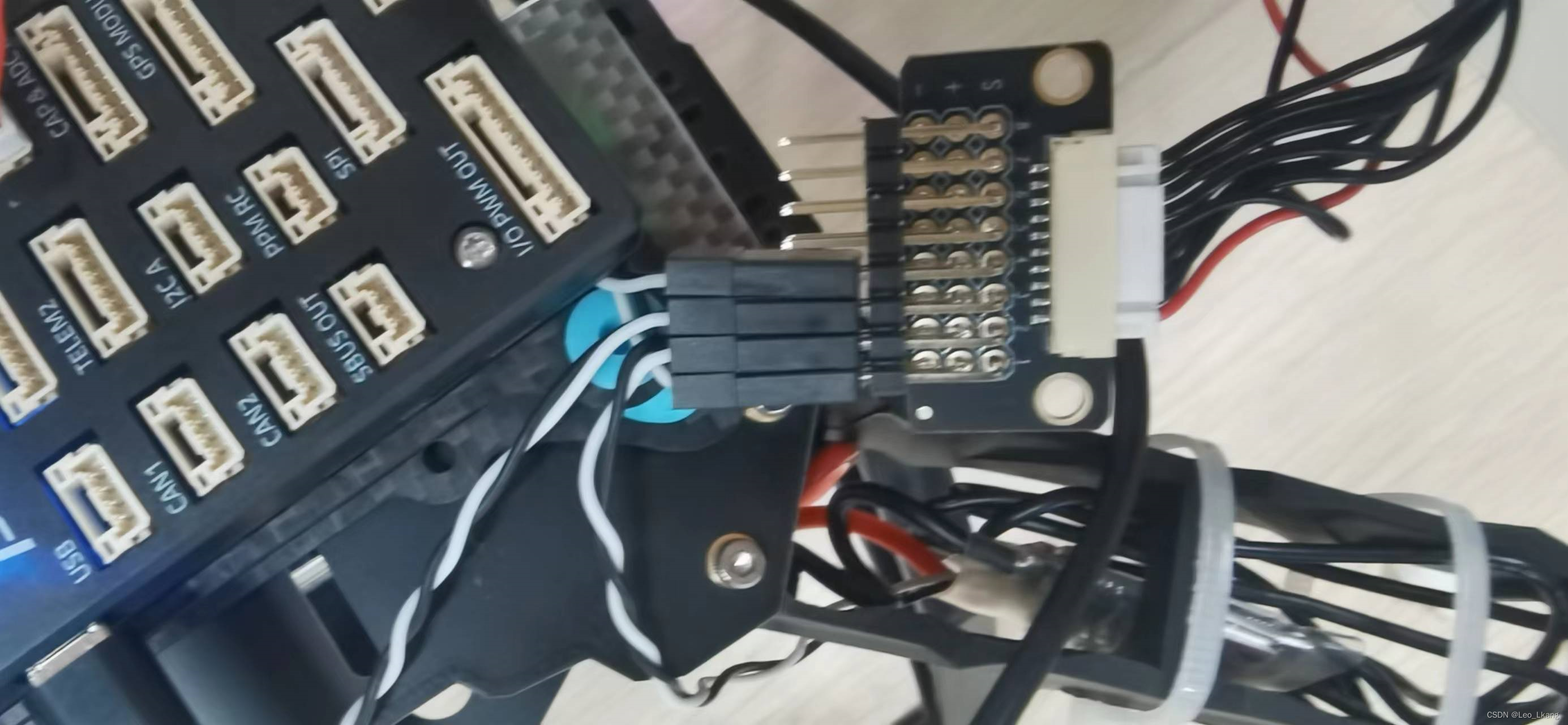
首先进行拼接操作 将机架和板子连接起来 pixhawk在POWER1接口上连接上电源模块
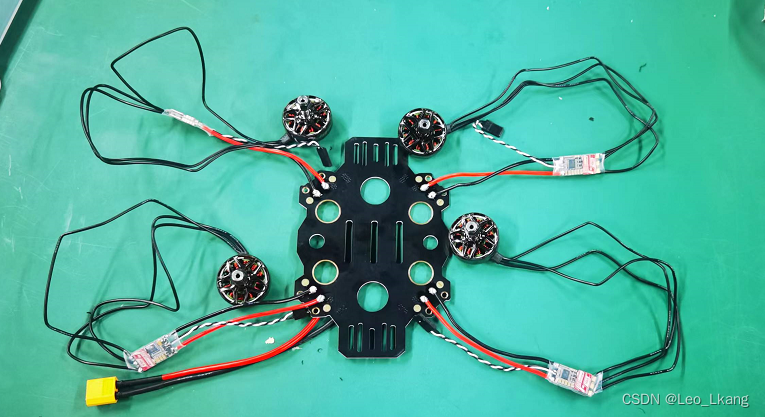
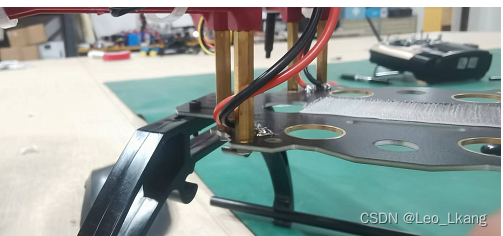
然后地板和电调焊接成下图这个样子 其中红色的线接地板的+(正)级 黑色的线接地板的-(负)级 在焊板后面(或者焊接电调的地方)将连接电池的接口线焊接上(注意公母头的区别)
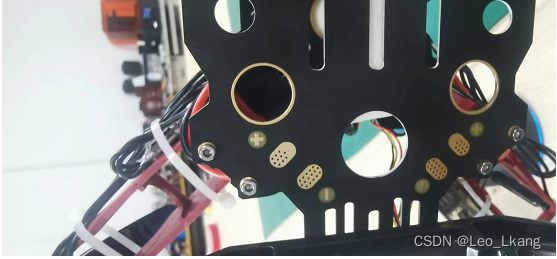
然后通过铜柱将焊板和上支架连接起来(如下图所示),将起落架也安装上
最后大致无人机样子如下:
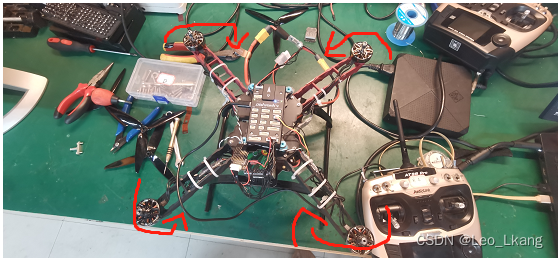
注意:其中白线要接在S端,在这里也就是白线在上,黑线在下,并且在连接的时候,并且右上的电调连在数字1处,左下的连接线连在数字2处,左上的电调线连在数字三处,右下的电调线连在数字4处 具体的机臂编号如下图所示
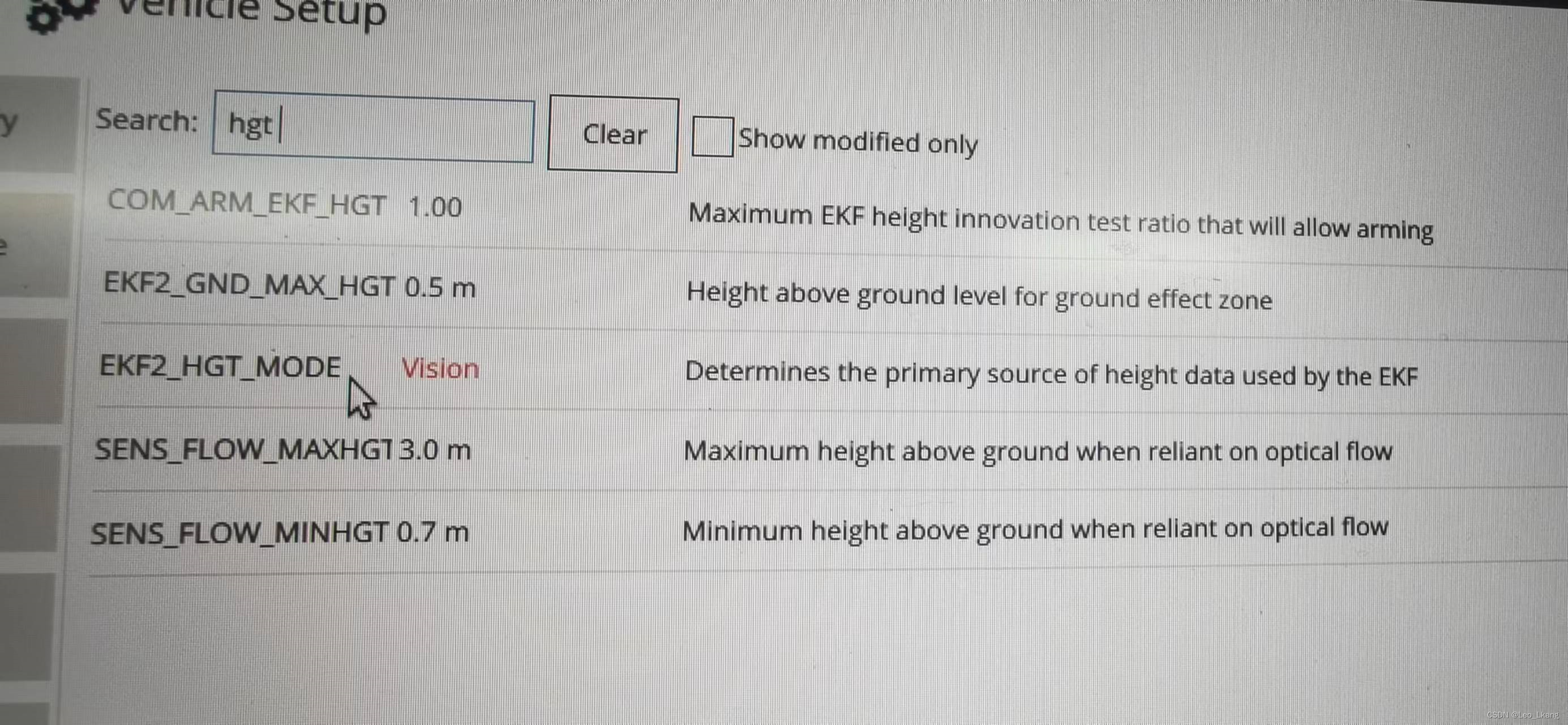
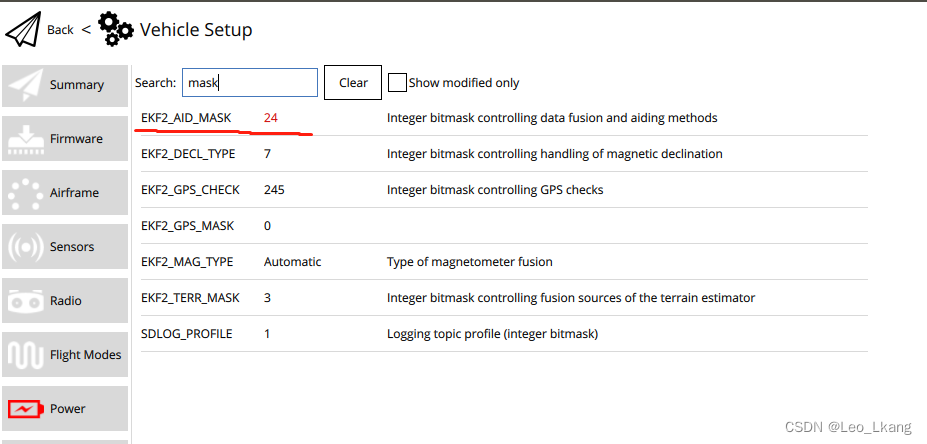
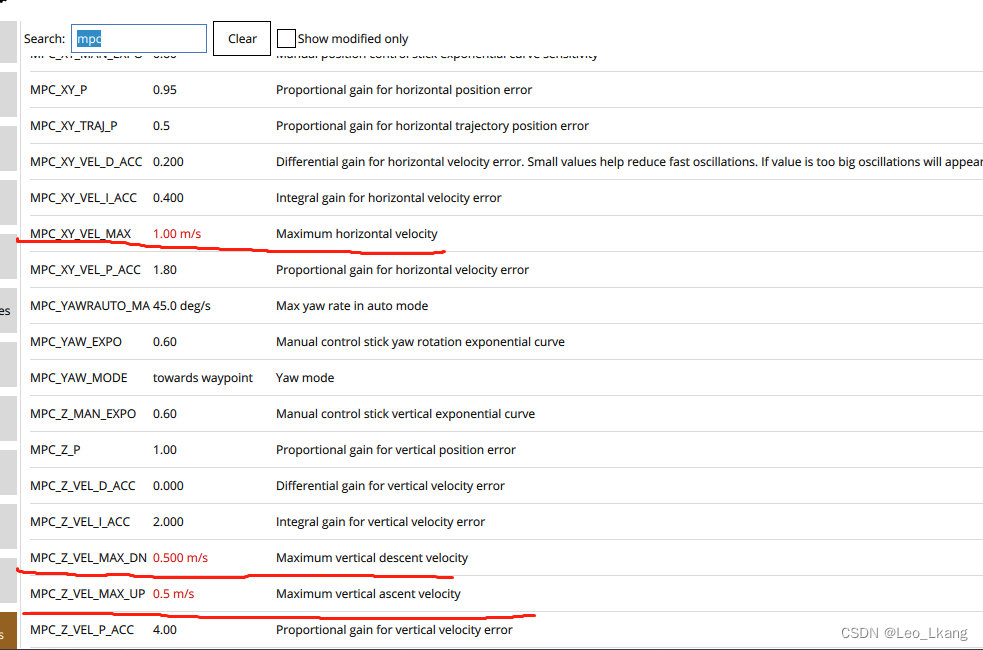
点击Calibrate,调节遥控器 进入Flight Modes 将Mode Channel 转换为Channel5 Flight Model1 改为Manual Flight Model4 改为Position Flight Model6 改为Offboard 将Arm Switch 改为Channel10 将Emergency kill switch channel 改为Channel9 在Parameters里面调节相关参数 大致这个调节以下参数 将EKF2_HGT_MODE 选择Vision 将EKF2_AID_MASK改为24(将两个vision勾起来) 将CBRK_USB_CHK设置为最大值 将如下红色圈画部分参数改为如下设置的值的大小 将dshot设置为dshot600
将MC_YAWRATE_MAX 设置为90deg/s(Max yaw rate)
调节舵机的转向 最终使得点击按照如下方式进行转动
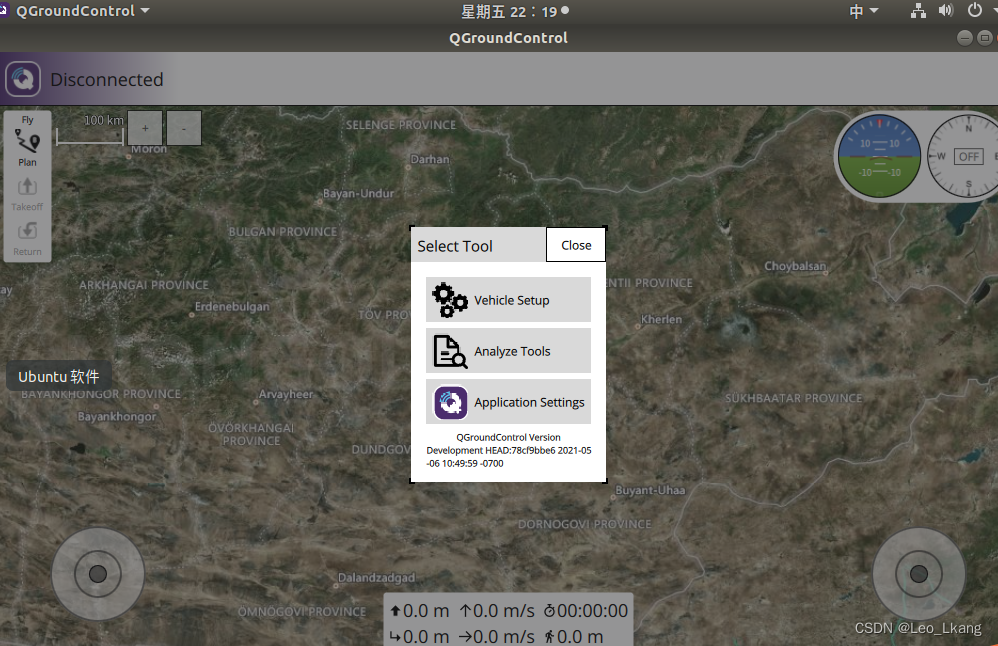
进入到Analyze Tools当中 选择MAVLink Console
在这个命令行输入: dshot reverse -m 1(这个是你想要改变的电机的号数) dshot save -m 1(这样就能够将电机的状态保存下来)
在重启QGC,插拔电源,关闭遥控器重新连接即可使得电机转动,基本的飞行搭建便完成了
 门店:
门店: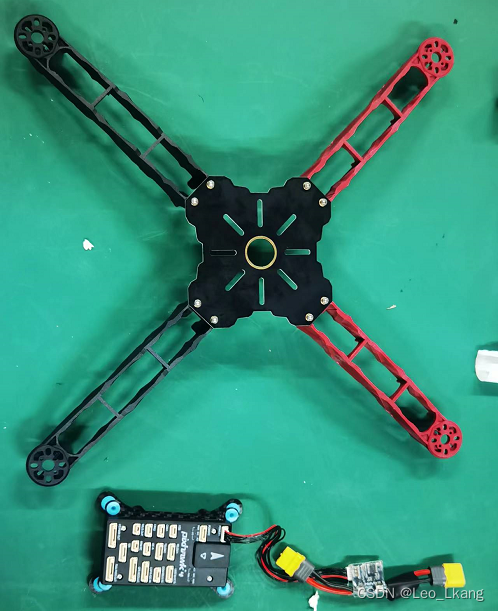
 在焊板后面(或者焊接电调的地方)将连接电池的接口线焊接上(注意公母头的区别)
在焊板后面(或者焊接电调的地方)将连接电池的接口线焊接上(注意公母头的区别)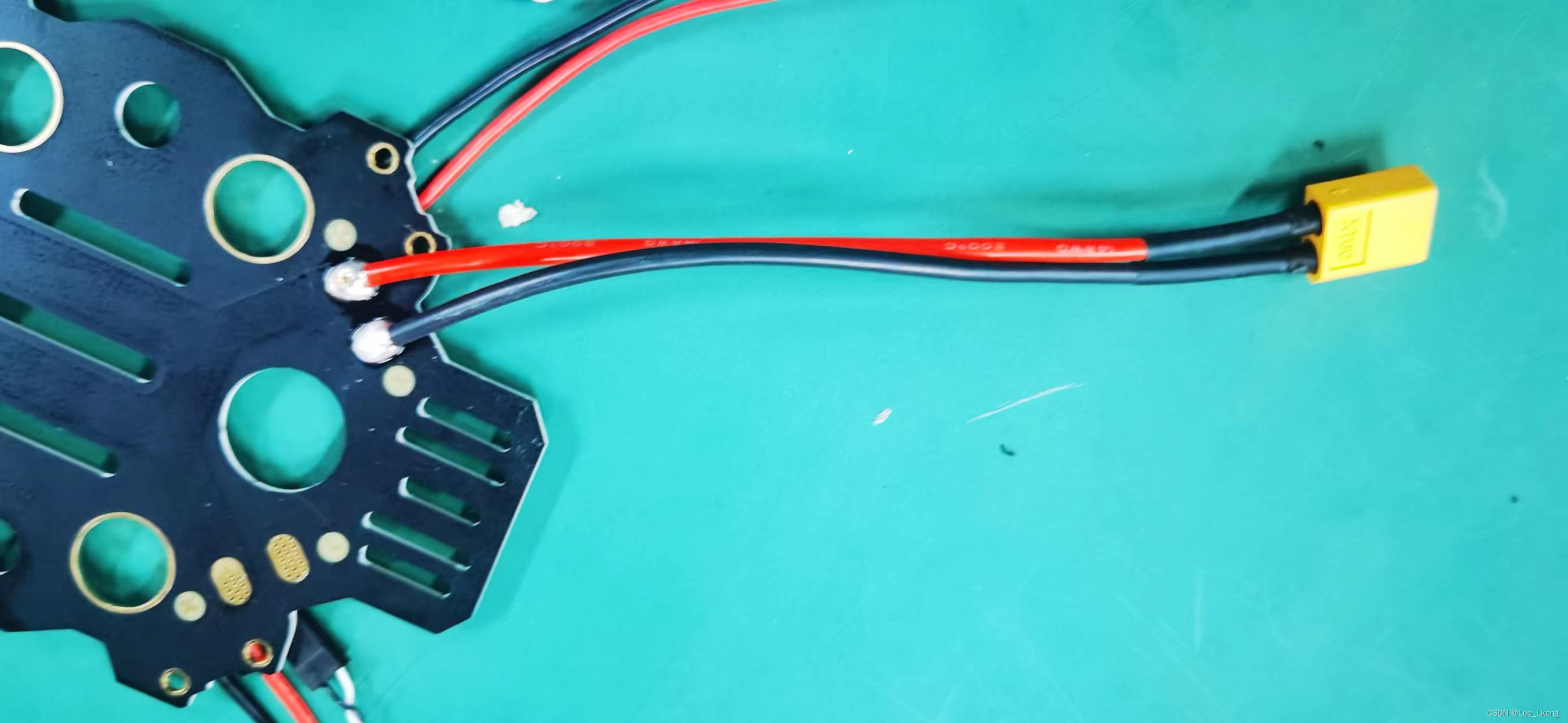





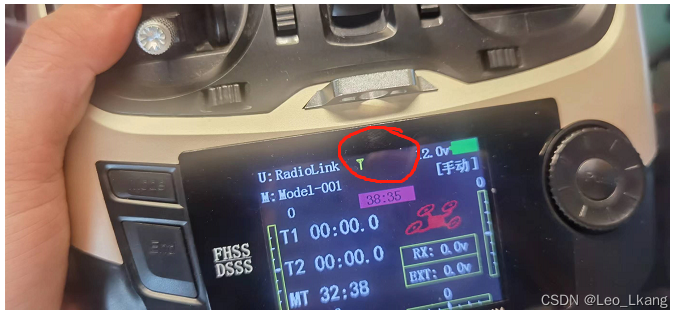 当配对成功的时候遥控器上会有如下的信号产生
当配对成功的时候遥控器上会有如下的信号产生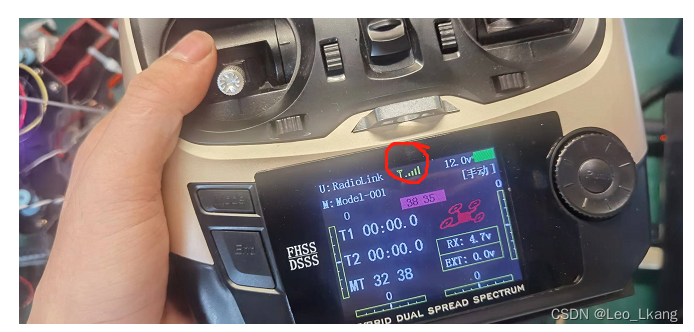 长按Model键,进入如下界面
长按Model键,进入如下界面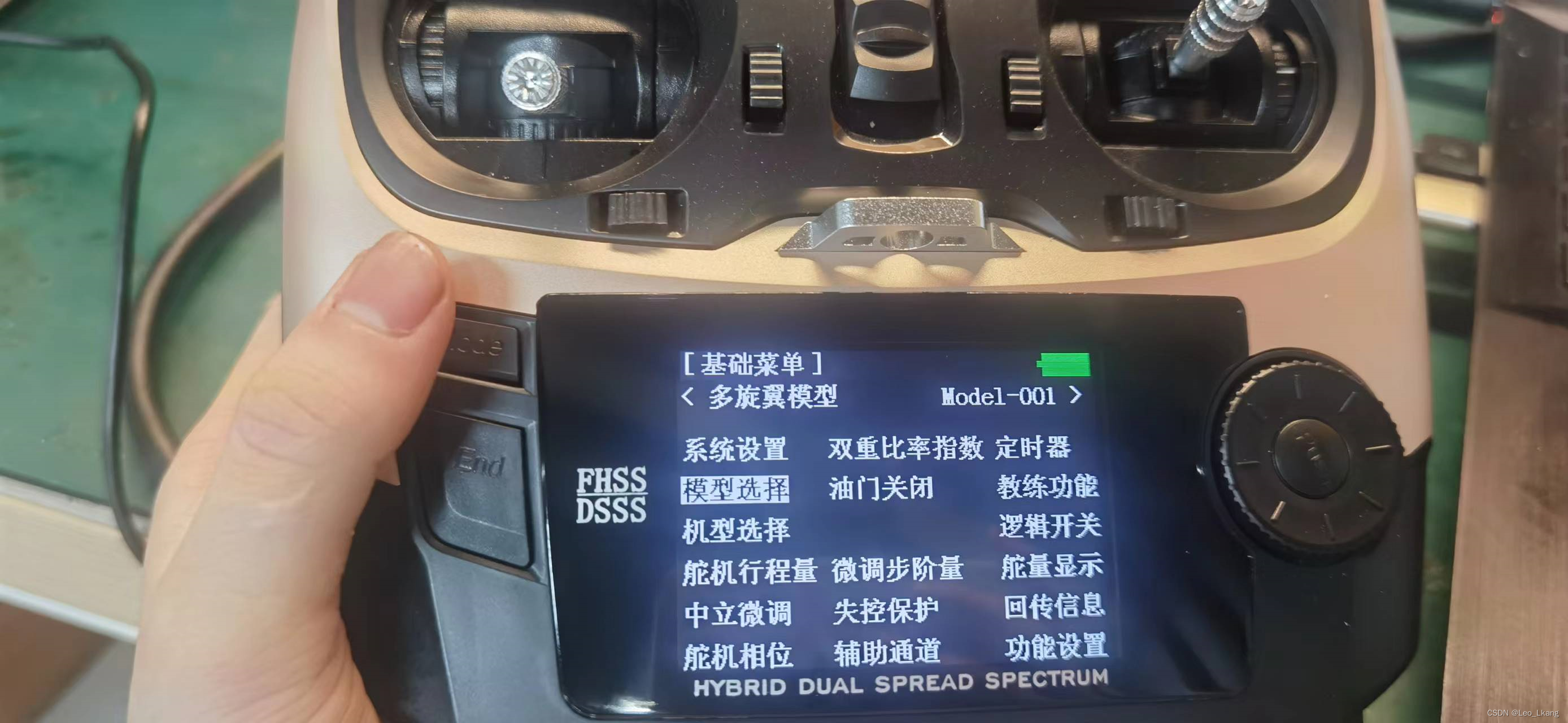 选择如下所示的四旋翼模型
选择如下所示的四旋翼模型
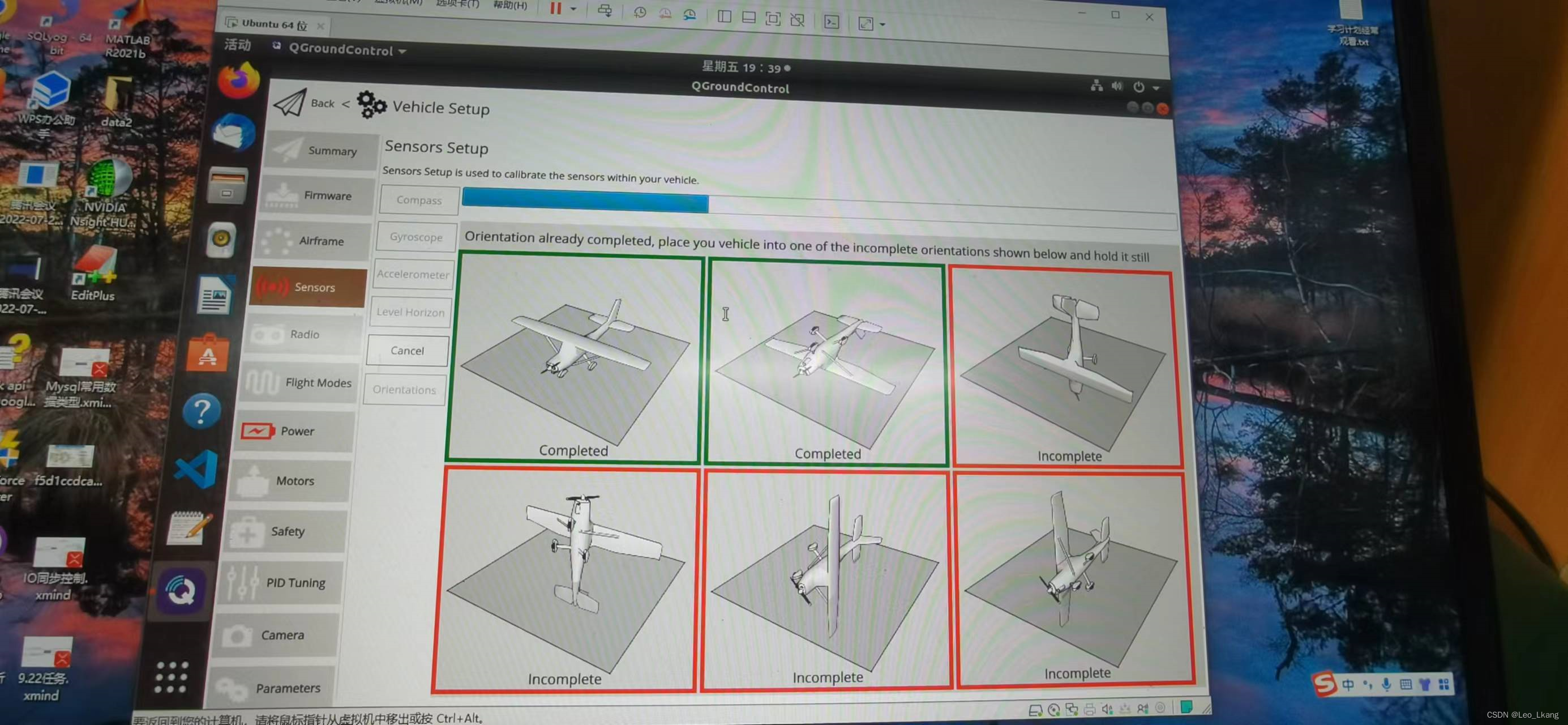
 进入Sensors调节,挨个进行调试
进入Sensors调节,挨个进行调试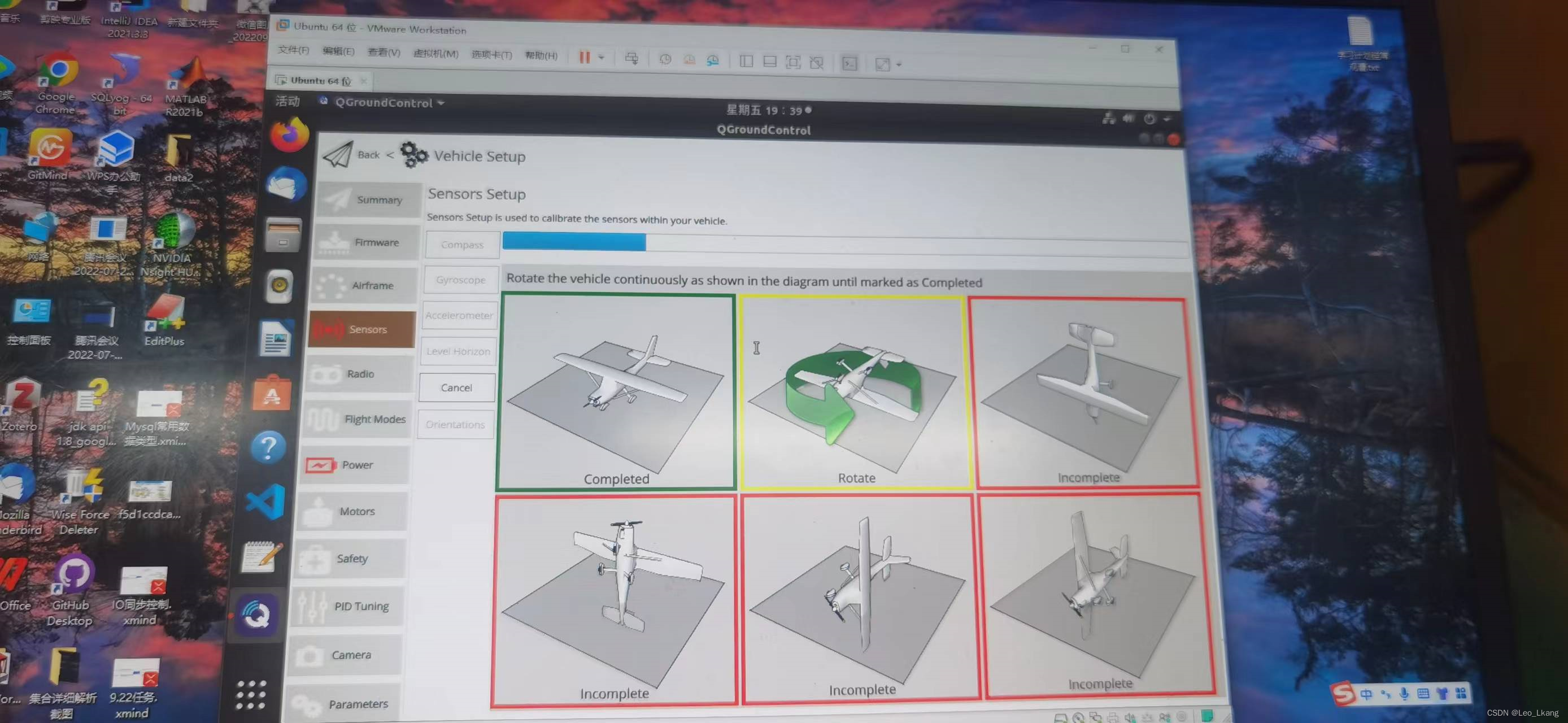
 点击Calibrate,调节遥控器
点击Calibrate,调节遥控器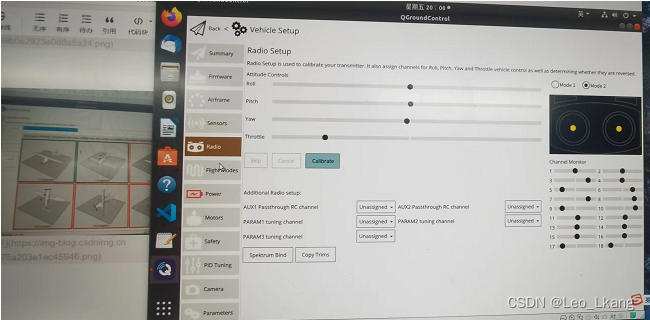 进入Flight Modes
进入Flight Modes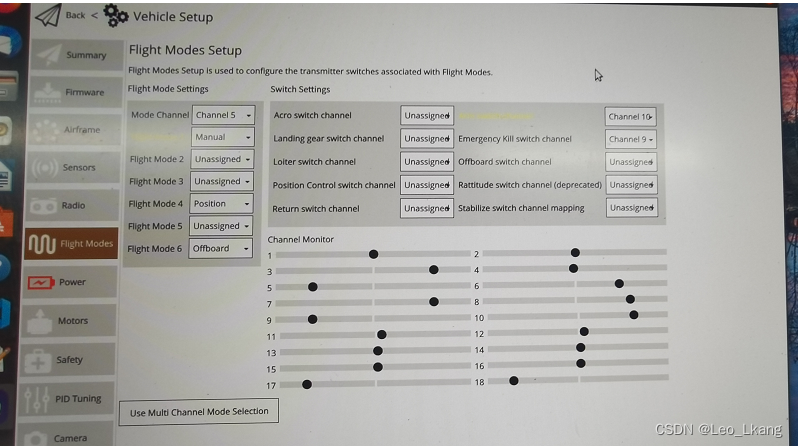
 将CBRK_USB_CHK设置为最大值
将CBRK_USB_CHK设置为最大值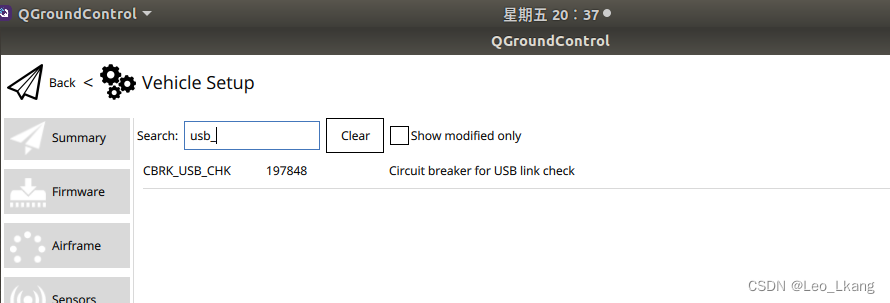 将如下红色圈画部分参数改为如下设置的值的大小
将如下红色圈画部分参数改为如下设置的值的大小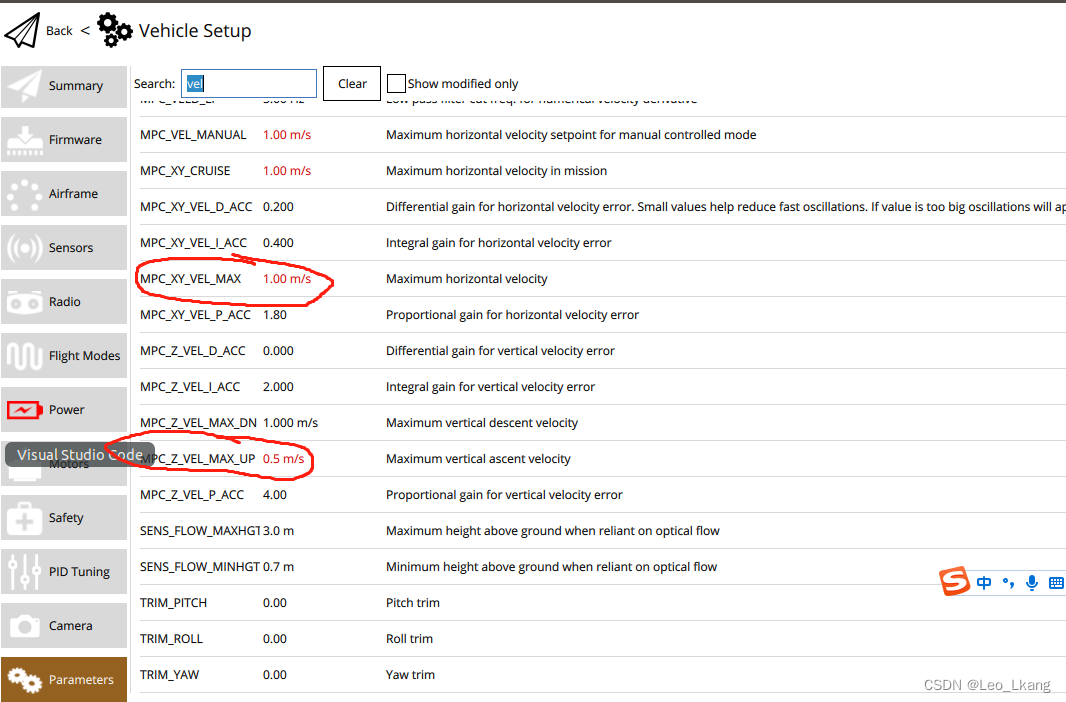
 将dshot设置为dshot600
将dshot设置为dshot600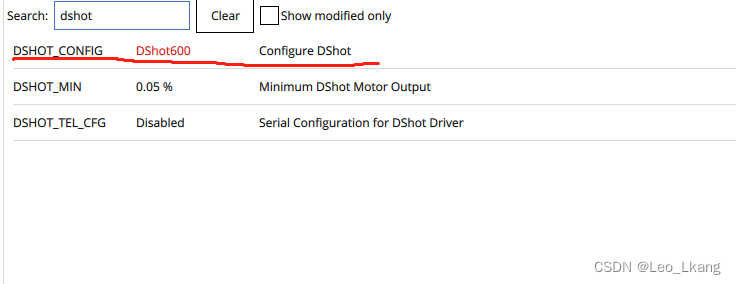 将MC_YAWRATE_MAX 设置为90deg/s(Max yaw rate)
将MC_YAWRATE_MAX 设置为90deg/s(Max yaw rate)
 选择MAVLink Console
选择MAVLink Console 在这个命令行输入:
在这个命令行输入: