系统:Ubuntu18.04
设备:Realsense D435i
一、安装相关依赖库
毕设后写的一篇通俗一些的,适合没接触过或不太会ubuntu的同学,前半部分都是一样的,
tips:需要安装一个[百度网盘],以便下载需要的文件。
→ → → orbslam2+小觅相机
相关依赖库
sudo apt-get install cmake gcc g++ git vim
sudo apt-get install libglew-dev
sudo apt-get install libboost-dev libboost-thread-dev
sudo apt-get install libboost-filesystem-dev
sudo apt-get install libpython2.7-dev
sudo apt-get install build-essential
安Pangolin和Eigen
这两个库,建议是0.5和3.2版本,报错可能性小,其他版本可能会出现不兼容等各种问题,目前从git下载已经是新版,这里提供一下0.5和3.2版本
pangolin:pangolin_v0.5 提取码: edam
Eigen3:Eigen_v3.2.10 提取码: hnw9
安装:
cd Pangolin
mkdir build
cd build
cmake ..
make
sudo make install
cd eigen
mkdir build
cd build
cmake ..
make
sudo make install
二、安装ROS Ubuntu18.04对应melodic
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop-full(时间略长,需等待一会)
!复制全了别丢东西!
------------------------------------------------------------------------
sudo rosdep init
出现错误:找不到命令
解决:sudo apt install python-rosdep2
------------------------------------------------------------------------
rosdep update
出现 timed out 出现超时问题
解决:解决方法
涉及到的rosdistro文件
rosdistro 提取码: b3hb
sudo apt-get install python-rosinstall
source /opt/ros/melodic/setup.bash
创建并初始化工作目录ROS使用一个名为catkin的ROS专用构建系统。为了使用它,用户需要创建并初始化catkin工作目录,如下所示。除非用户创建新的工作目录,否则此设置只需设置一次。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws/
catkin_make
sudo apt install net-tools
gedit ~/.bashrc
在弹出的文本中最后面添加如下两句
source /opt/ros/melodic/setup.bash
source ~/catkin_ws/devel/setup.bash
保存
source ~/.bashrc
进行测试:
roscore
出现错误:没发现roscore
解决:
sudo apt-get install ros-melodic-desktop
重新打开三个终端:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
鼠标点击最后一个终端,按方向键小海龟可以移动,即是配置成功
三、编译orbslam
1.安装pcl点云库,大致按这个教程安装就可以
点云安装
2.下载 高翔博士修改后的orbslam2
git clone https://github.com/gaoxiang12/ORBSLAM2_with_pointcloud_map.git
我按照网上教程稍微自己稍微修改了的
复制这段内容后打开百度网盘手机App,操作更方便哦
链接:https://pan.baidu.com/s/18T6kNhHFRxoxiKYo3o3rEg
提取码:i3CB --来自百度网盘超级会员V5的分享
如果下载高翔原版代码,解压zip,将第一个文件夹中文件,复制替换进 解压后 文件夹中 的ORB_SLAM2_modified
3.编译g2o
解压后找到g2o_with_orbslam2文件夹
如果下载我的应该不需要修改,高翔原版需要改动一下
1)分别对文件夹下cmakelist和g20下的cmakelist对相应语句进行注释
主文件夹下

g20下的
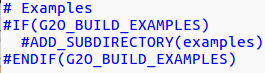
注释后保存
2)修改g2o/types/slam2d/edge_se2_pointxy_bearing.cpp
原代码:t.setRotation(t.rotation().angle()+_measurement);
修改后:t.setRotation((Eigen::Rotation2Dd)(t.rotation().angle()+_measurement));
3)修改/g2o_with_orbslam2/g2o/solvers/eigen/linear_solver_eigen.h
原代码:typedef Eigen::PermutationMatrix<Eigen::Dynamic, Eigen::Dynamic, SparseMatrix::Index> PermutationMatrix;
修改后:typedef Eigen::PermutationMatrix<Eigen::Dynamic, Eigen::Dynamic, SparseMatrix::StorageIndex> PermutationMatrix;
保存后,回到g2o_with_orbslam2主文件夹下
mkdir build
cmake ..
make -j8
sudo make install
4.进入ORB_SLAM2_modified文件夹
高翔原版没有ORBvoc.txt.tar.gz需要自行下载,而后将其放置于Vocabulary文件夹下,顺手解压一下
ORBvoc.txt.tar.gz
修改文件夹中的cmakelist,将opencv和eigen3修改为自己电脑安装的版本,我前边提供的eigen3为3.2.10,我安装时ros自带的3.2的opencv。如果不清楚可以进行查询
pkg-config --modversion opencv
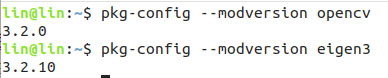
修改cmakelist为对应版本
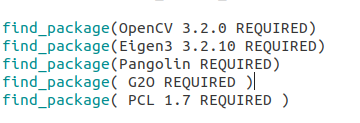
来到/ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/CMakeLists.txt
查看这 5 处是否正确,并也将对应的库版本号修改为自己安装的版本

修改后,删除
/ORB_SLAM2_modified/build,
/ORB_SLAM2_modified/Thirdparty/DBoW2/build
/ORB_SLAM2_modified/Thirdparty/g2o/build
删掉三个 build 文件夹
在ORB_SLAM2_modified下右键打开终端
cd ORB_SLAM2_modified/Thirdparty/DBoW2
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make
从新在ORB_SLAM2_modified下右键打开终端
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j8
数据集测试,数据集需自行下载,我提供的代码中dataset中有两个下载好直接能用的数据集
如果自己下载需要对rgbd和depth进行关联
python associate.py rgb.txt depth.txt > associations.txt
示例命令
./Example/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt path_to_settings path_to_sequence path_to_association
在ORB_SLAM2_modified打开终端执行
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml datasets/rgbd_dataset_freiburg1_xyz datasets/rgbd_dataset_freiburg1_xyz/association.txt
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml datasets/rgbd_dataset_freiburg1_room datasets/rgbd_dataset_freiburg1_room/association.txt
高翔原版似乎没有地图保存和彩色,如果需要保存地图,或者地图不是彩色,请参考文章中间部分
保存地图,地图不是彩色
保存的点云在主文件夹下,名称vslam.pcd,当前文件夹打开终端

pcl_viewer vslam.pcd (查看点云)
四、安装D435i SDK
Ubuntu18.04 + ROS melodic 安装使用 RealSenseD435i
Ubuntu18.04下安装RealSense D435i相机的SDK和ROS包
五、编译orbslam +ROS
1.来到ORB_SLAM2_modified文件夹
在打开的文本最后添加你的ROS路径,保存
gedit ~/.bashrc
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/你的目录/ORB_SLAM2_modified/Examples/ROS
保存后在终端输入
source ~/.bashrc
chmod +x build_ros.sh
./build_ros.sh
2.修改ORB_SLAM2_modified/Examples/ROS/ORB_SLAM2/src/ros_rgbd.cc文件,把rgb_topic和depth_topic订阅话题修改为
"/camera/color/image_raw";
"/camera/aligned_depth_to_color/image_raw";
ORB_SLAM2_modified下从新打开终端
chmod +x build.sh
./build.sh
chmod +x build_ros.sh
./build_ros.sh
从新打开终端,查看内参
roscore
roslaunch realsense2_camera rs_rgbd.launch
rostopic echo /camera/color/camera_info
没有rs_rgbd.lunch
解决:sudo apt-get install ros-melodic-rgbd-launch
终端中显示的K,为参数,其中
K = [fx 0 cx 0 fy cy 0 0 1 ] 基线50mm
修改参数,得到一个新的D435i.yaml
%YAML:1.0
Camera.fx: 909.559875
Camera.fy: 909.740478
Camera.cx: 645.366455
Camera.cy: 366.805908
Camera.k1: 0.0
Camera.k2: 0.0
Camera.p1: 0.0
Camera.p2: 0.0
Camera.p3: 0.0
Camera.width: 640
Camera.height: 480
Camera.fps: 30.0
Camera.bf: 50.0
Camera.RGB: 1
ThDepth: 40.0
DepthMapFactor: 1000.0
ORBextractor.nFeatures: 1000
ORBextractor.scaleFactor: 1.2
ORBextractor.nLevels: 8
ORBextractor.iniThFAST: 20
ORBextractor.minThFAST: 7
Viewer.KeyFrameSize: 0.05
Viewer.KeyFrameLineWidth: 1
Viewer.GraphLineWidth: 0.9
Viewer.PointSize:2
Viewer.CameraSize: 0.08
Viewer.CameraLineWidth: 3
Viewer.ViewpointX: 0
Viewer.ViewpointY: -0.7
Viewer.ViewpointZ: -1.8
Viewer.ViewpointF: 500
PointCloudMapping.Resolution: 0.01
meank: 50
thresh: 2.0
运行,打开三个终端
roscore
roslaunch realsense2_camera rs_rgbd.launch
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/RGB-D/D435i.yaml
运行视频b站:【视觉slam Orbslam2+D435i 稠密点云,记录-哔哩哔哩

过程中会遇到各种问题,需要大家自己解决喽,因为问题各不相同,所以大家就自行搜索解决,我只记录了一下自己从配置到运行的大致过程。
我遇到最多的问题是这个:
核心转储:核心转储解决
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)