1.IMU简介
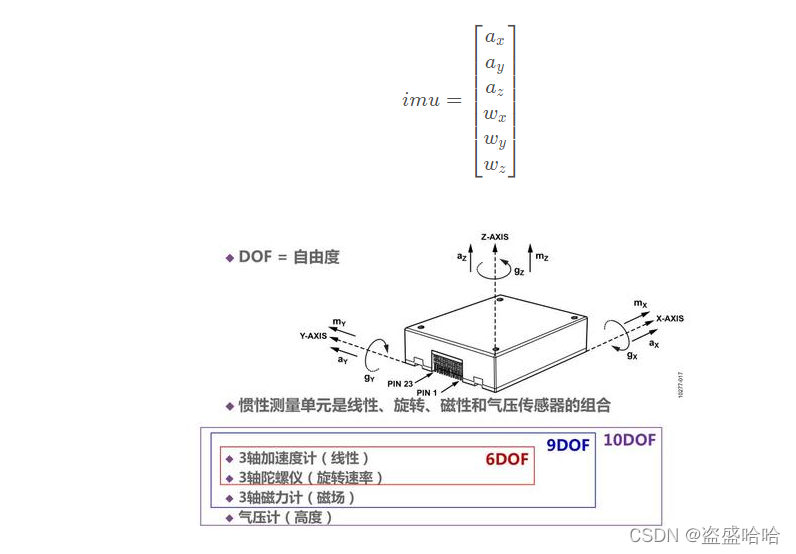
惯性测量单元(Inertial Measurement Unit)通常由3个加速度计和3个陀螺仪组合而成,加速度计和陀螺仪安装在互相垂直的测量轴上,这里可以将其输出看作为三个方向的加速度和角速度,表示为:
2.GPS(RTK)简介
全球定位系统(Global Positioning System)大家应该都不陌生,其输出常见为:经度,维度,和高度,有的还存在 北东天的速度[VN;VE;VU],表示为:

两者的融合策略(两个独立的系统用松耦合):::
松组合
松组合指的是GPS接收机使用导航滤波器把伪距和载波相位观测值处理成独立的位置,速度导航解,把GPS位置,速度数据作为观测量直接输入到卡尔曼滤波器中,执行递归最小二乘估计,并对惯导进行导航修正;GPS和惯导作为两套独立的位置和姿态参数输入到组合导航框架中,组合导航框架与GPS和惯导之间存在反馈回路,最终产生单一的组合导航解。
其特点是:用GPS观测值修正系统输出的导航解;使用惯导误差状态反馈来改正下一历元的惯导导航解。
GPS接收机的位置和速度观测量解算出来的组合定位结果会受到一些限制。如果GPS的解算出现中断,系统仍能够生成GPS/IMU的组合结果(反向平滑算法),但是位置精度会随着时间的推移而降低,知道GPS的解算再次收敛。如果GPS接收机仅仅接收到了三颗卫星,但是在差分模式下至少需要4颗卫星,那么GPS接收机不能计算出导航解,GPS辅助惯导的卡尔曼滤波器收到的数据是没有GOS接收机辅助的数据;也不管接收机是否跟踪卫星,是否输出伪距和载波相位观测值。
1:状态估计空间是用IMU的均值来进行位置推算
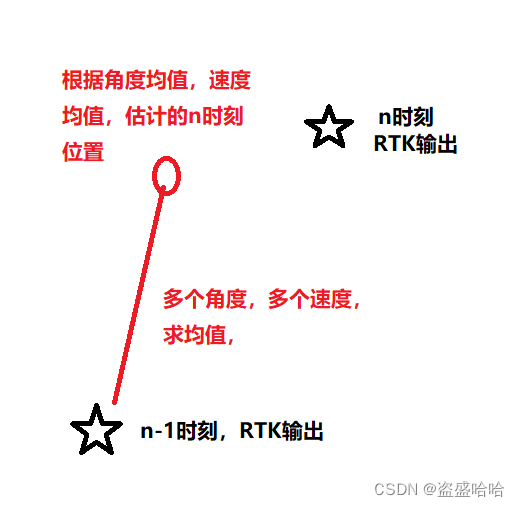
2:将RTK的数据去分段计算:

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)