非线性控制理论
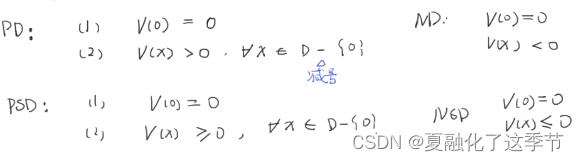
1.李雅普诺夫稳定性
链接: 非线性理论基础_Lyapunov直接方法
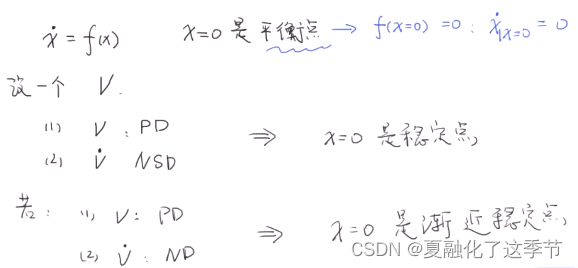
链接: Lyapunov第二定理渐进稳定
链接: Lyapunov稳定性定理
2.非线性系统的基础反馈稳定控制器
链接: 非线性系统的基础反馈稳定控制器
3.非线性反馈控制器
链接: 非线性反馈控制器
反馈控制器适用于系统状态完全已知。
4.非线性自适应控制器
自适应控制器适用于系统状态不是完全已知,使得控制器适应不知道的参数。
链接: 自适应控制器
5.非线性鲁棒控制
链接: 鲁棒控制
模型预测控制MPC
链接: 模型预测控制(MPC)原理及详细推导
链接: 课程推导
步骤总结:
1.状态方程:

A,B已知。X(k)和U(k)可以是n维或1个,n和k的值都是已知,k可以设置,为求解步数。
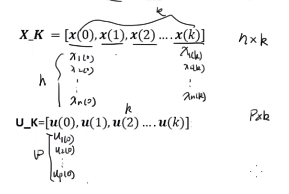
所以,代码中的状态方程为:

X_K(:k+1)表示X_K所有行的第k+1列,其他冒号表示类似。
2.状态变量权重矩阵Q,状态变量终端的权重矩阵F,控制器输入u的权重矩阵R已知。
3.控制器输入代价函数:

最小化J,是通过设置U(k)得到的,U(k)的值为:
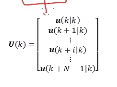
虽然预测出这么多u,但是只执行第一项u(k),每个u(k)可能有n维输入或者1个输入。
4.参数矩阵求解
推导已知:
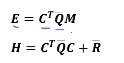
和:
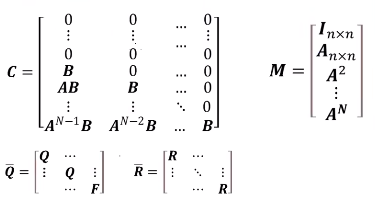
可求出E,H矩阵。
5.使用matlab的quadprog函数求解使得J最小的U(k),然后取U(k)的第一步u(k|k)即可。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)