ROS入门往期:
ROS入门保姆级教程:1-hello world初体验
ROS入门保姆级教程:2-VScode中使用ROS
ROS入门保姆级教程:3-ROS文件系统
ROS入门保姆级教程:4-ROS文件系统操作指令
ROS入门保姆级教程:5-ROS计算图
ROS入门保姆级教程:6-ROS话题通信实现
文章目录
- 0 介绍
- 1 自定义消息的流程
- 1.1 定义msg文件
- 1.2 编辑配置文件
- 1.3 编译
- 2 话题通信自定义msg调用(C++)
- 2.0 VScode配置
- 2.1 发布方实现(C++)
- 2.2 订阅方实现(C++)
- 2.3 测试
- 3 话题通信自定义msg调用(Python)
- 3.0 VScode配置
- 3.1 发布方实现(Python)
- 3.2 订阅方实现(Python)
- 3.3 测试
0 介绍
在 ROS 通信协议中,数据载体是一个较为重要组成部分,ROS 中通过 std_msgs 封装了一些原生的数据类型,比如:String、Int32、Int64、Char、Bool、Empty… 但是,这些数据一般只包含一个 data 字段,结构的单一意味着功能上的局限性,当传输一些复杂的数据,std_msgs 由于描述性较差而显得力不从心,这种场景下可以使用自定义的消息类型。
msgs只是简单的文本文件,每行具有字段类型和字段名称,可以使用的字段类型有:
- int8, int16, int32, int64 (或者无符号类型: uint*)
注意:使用int类型的编译无法通过 - float32, float64
注意:使用double、float类型的编译无法通过 - string
- time, duration
- other msg files
- variable-length array[] and fixed-length array[C]
ROS中还有一种特殊类型:Header,标头包含时间戳和ROS中常用的坐标帧信息。会经常看到msg文件的第一行具有Header标头。
1 自定义消息的流程
- 在功能包中创建msg文件夹,按照固定格式创建 msg 文件
- 编辑配置文件
- 编译生成可以被 Python 或 C++ 调用的中间文件
1.1 定义msg文件
功能包下新建 msg 文件夹,添加文件 person.msg
uint32 NO
string name
uint16 age
float64 height
string job
1.2 编辑配置文件
【package.xml 】中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
【CMakeLists.txt 】编辑 msg 相关配置
- 添加编译依赖
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
- 添加 .msg 源文件
add_message_files(
FILES
Person.msg
)
- 为1中 的message_generation 添加依赖
generate_messages(
DEPENDENCIES
std_msgs
)
- 添加执行依赖
catkin_package(
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
)
1.3 编译
-
编译:【Ctrl + Shift + B】
-
编译后的中间文件查看:
C++ 需要调用的中间文件(…/工作空间/devel/include/包名/xxx.h)
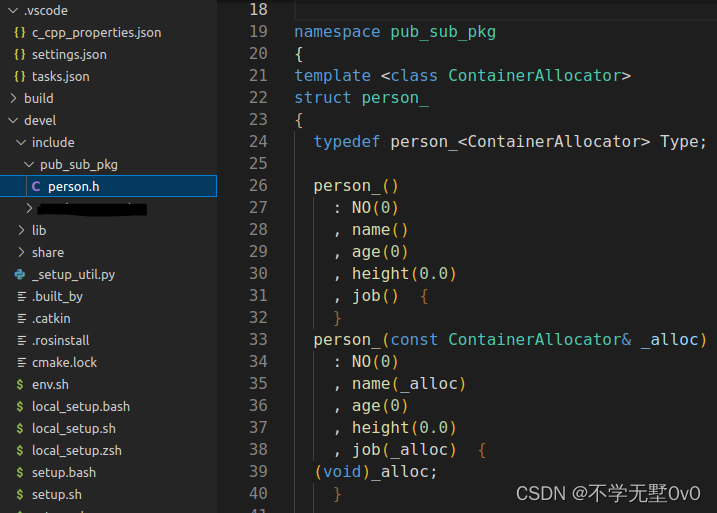
C++调用需要include【.h】头文件
Python 需要调用的中间文件(…/工作空间/devel/lib/python3/dist-packages/包名/msg/xxx.py)
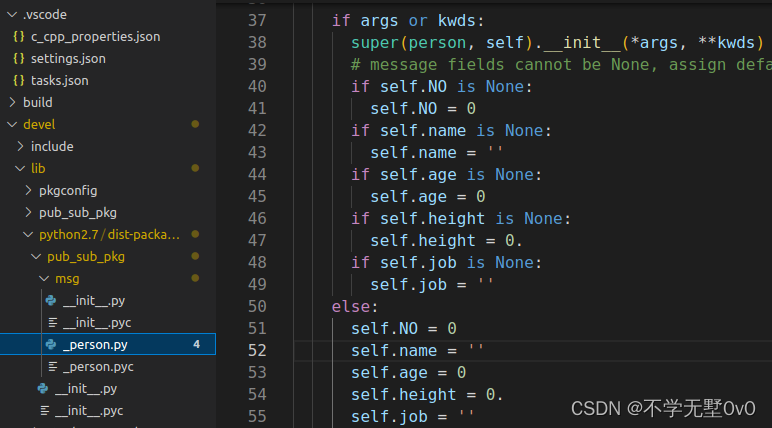
Python调用需要导包【.py】头文件
后续调用相关 msg 时,是从这些中间文件调用的
2 话题通信自定义msg调用(C++)
分析:
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
发布方
接收方
数据(此处为自定义消息)
流程:
编写发布方实现;
编写订阅方实现;
编辑配置文件;
编译并执行。
2.0 VScode配置
!!该步骤也可省,只是为了防止一些异常情况
为了方便代码提示以及避免误抛异常,需要先配置 vscode,将前面生成的 head 文件路径配置进 c_cpp_properties.json 的 includepath属性:
{
"configurations": [
{
"browse": {
"databaseFilename": "${default}",
"limitSymbolsToIncludedHeaders": false
},
"includePath": [
"/opt/ros/melodic/include/**",
"/usr/include/**",
"/home/【workspace_name】/devel/include/**"
],
"name": "ROS",
"intelliSenseMode": "gcc-x64",
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "c++14"
}
],
"version": 4
}
2.1 发布方实现(C++)
C++源文件放置路径于:【/workspace_name / src / pkg_name / src / file_name.cpp】
1.源码
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "pub_sub_pkg/person.h"
using namespace ros;
int main(int argc, char **argv)
{
init(argc, argv, "demo5_pub_person");
NodeHandle nh_pub_person;
Publisher pub_obj_person = nh_pub_person.advertise<pub_sub_pkg::person>("topic_name_pubsub_person", 100);
pub_sub_pkg::person person_obj;
person_obj.NO = 0;
person_obj.name = "Zhang San";
person_obj.age = 17;
person_obj.height = 1.78;
person_obj.job = "student";
Rate rate(1);
while(ok())
{
person_obj.NO ++;
pub_obj_person.publish(person_obj);
ROS_INFO("\n Personnel information: \n NO.:%u, \n NAME: %s, \n AGE: %d, \n HEIGHT: %.2f, \n JOB: %s",
person_obj.NO, person_obj.name.c_str(), person_obj.age, person_obj.height, person_obj.job.c_str());
rate.sleep();
spinOnce();
}
return 0;
}
2.配置CMakeLists.txt文件
add_executable(demo5_pub_person src/demo5_pub_person_c.cpp)
add_dependencies(demo5_pub_person ${PROJECT_NAME}_generate_messages_cpp)
target_link_libraries(demo5_pub_person
${catkin_LIBRARIES}
)
2.2 订阅方实现(C++)
1.源码
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "pub_sub_pkg/person.h"
using namespace ros;
void callback_person(const pub_sub_pkg::person::ConstPtr &person_msg)
{
ROS_INFO("\n Received Personnel Information: \n NO.:%u, \n NAME: %s, \n AGE: %d, \n HEIGHT: %.2f, \n JOB: %s",
person_msg->NO, person_msg->name.c_str(), person_msg->age, person_msg->height, person_msg->job.c_str());
}
int main(int argc, char **argv)
{
init(argc, argv, "demo6_sub_person");
NodeHandle nh_sub_person;
Subscriber sub_obj_person = nh_sub_person.subscribe("topic_name_pubsub_person", 100, callback_person);
spin();
return 0;
}
2.配置CMakeLists.txt文件
add_executable(demo6_sub_person src/demo6_sub_person_c.cpp)
add_dependencies(demo6_sub_person ${PROJECT_NAME}_generate_messages_cpp)
target_link_libraries(demo6_sub_person
${catkin_LIBRARIES}
)
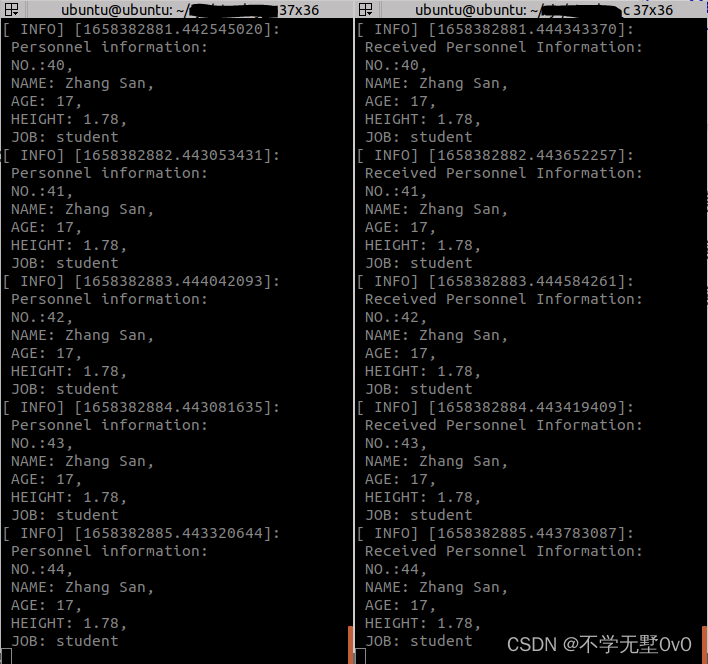
2.3 测试
-
发布订阅
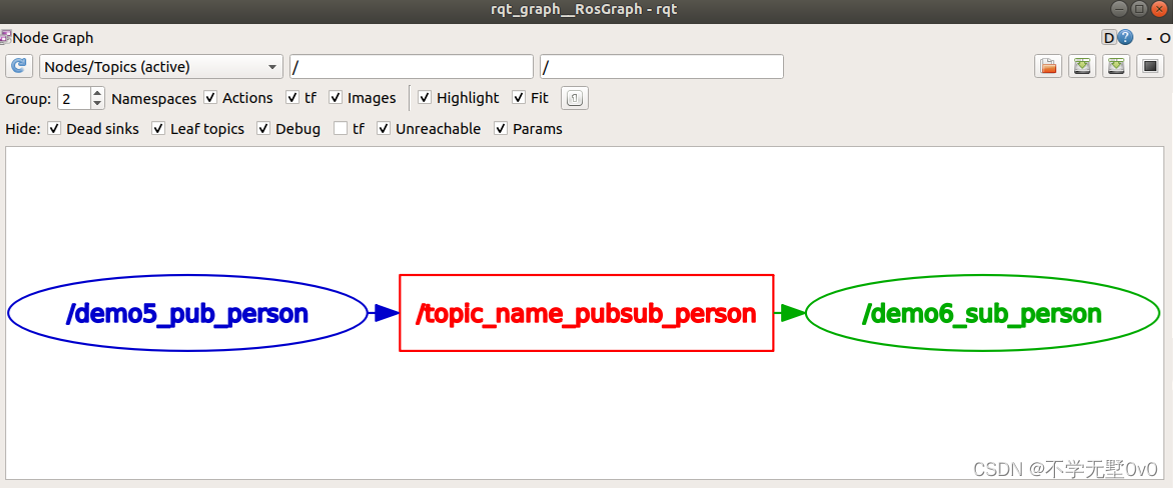
-
计算图
3 话题通信自定义msg调用(Python)
分析:
在模型实现中,ROS master 不需要实现,而连接的建立也已经被封装了,需要关注的关键点有三个:
发布方
接收方
数据(此处为自定义消息)
流程:
编写发布方实现;
编写订阅方实现;
为python文件添加可执行权限;
编辑配置文件;
编译并执行。
3.0 VScode配置
为了方便代码提示以及误抛异常,需要先配置 vscode,将前面生成的 python 文件路径配置进 settings.json
{
"python.autoComplete.extraPaths": [
"/opt/ros/noetic/lib/python3/dist-packages",
"/xxx/yyy工作空间/devel/lib/python3/dist-packages"
"/home/【workspace_name】/devel/lib/python2.7(或python3)/dist-packages/"
]
}
3.1 发布方实现(Python)
Python源文件放置路径于:【/workspace_name / src / pkg_name / scripts / file_name.py】
- 源文件
import rospy
from pub_sub_pkg.msg import person
if __name__ == "__main__":
rospy.init_node("demo7_pub_person")
pub_obj_person = rospy.Publisher("topic_name_pubsub_person", person, queue_size=100)
message_person = person()
message_person.NO = 0
message_person.name = "Zhang MaZi"
message_person.age = 36
message_person.job = "robber"
rate = rospy.Rate(1)
while not rospy.is_shutdown():
message_person.NO += 1
pub_obj_person.publish(message_person)
rospy.loginfo("\n Publish message: \n NO.: %d \n Name: %s \n Age: %d \n Job: %s",
message_person.NO, message_person.name, message_person.age, message_person.job)
rate.sleep()
- 添加可执行权限
进入scripts /目录
$ chmod +x *.py
$ chmod +x 【python_file_name.py】
3.2 订阅方实现(Python)
import rospy
from pub_sub_pkg.msg import person
def callback_sub_py_person(person_msg_get):
rospy.loginfo("\n Received Personnel Information: \n NO.: %d \n Name: %s \n Age: %d \n Job: %s",
person_msg_get.NO, person_msg_get.name, person_msg_get.age, person_msg_get.job)
if __name__ == "__main__":
rospy.init_node("demo8_sub_person")
sub_obj_person = rospy.Subscriber("topic_name_pubsub_person", person, callback_sub_py_person, queue_size=100)
rospy.spin()
- 添加可执行权限
进入scripts /目录
$ chmod +x *.py
$ chmod +x 【python_file_name.py】
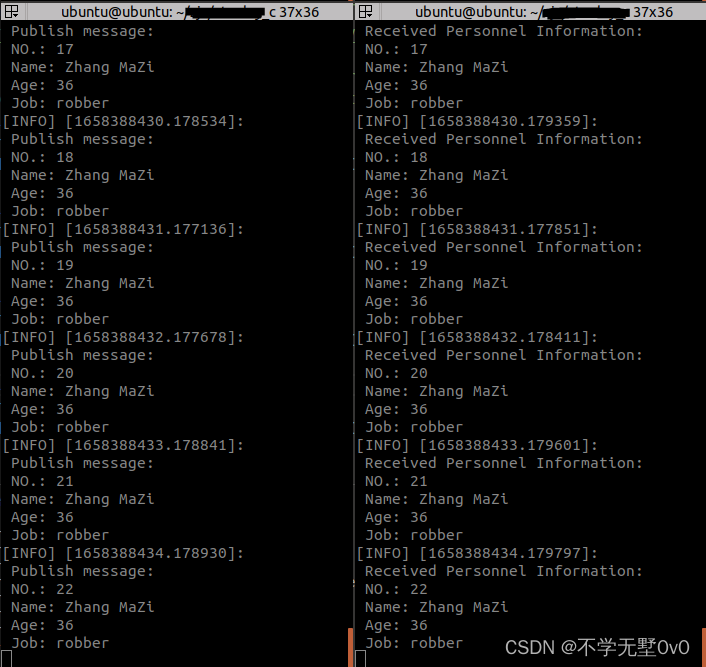
3.3 测试
- 发布订阅
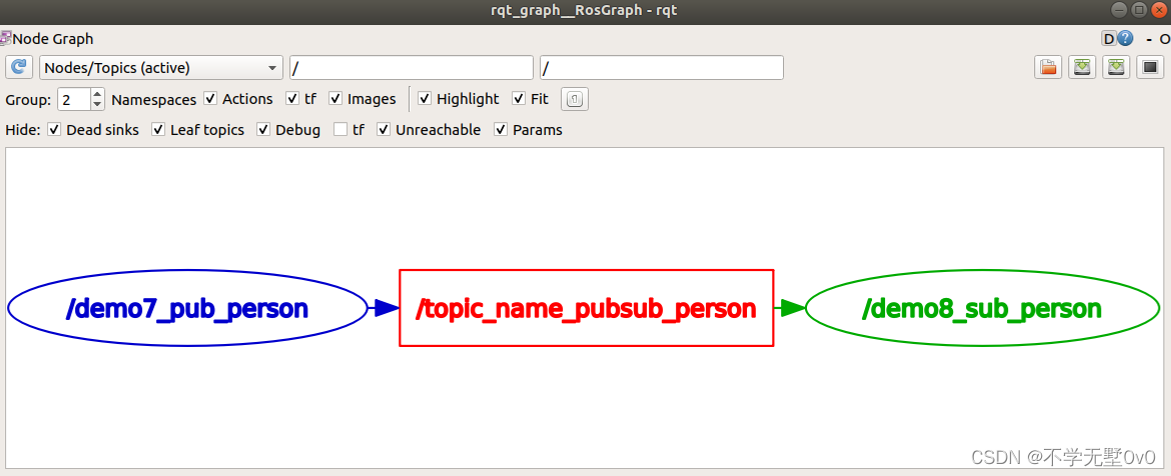
- 计算图
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)