摘自:https://blog.csdn.net/weixin_41074793/article/details/87866964
使用小觅相机标准入门版运行vins
骑士——永不止步 2019-02-21 19:21:20 2632 收藏 10
分类专栏: VINS SLAM VIO
版权
文章目录
-
- 运行步骤概括
- 详细步骤
-
- 第一步:下载相机驱动并编译
- 第二步:下载源码并编译
- 第三步:更新源码中的配置文件
-
- 3.1 获得相机与IMU参数
- 3.2: 修改源代码的参数文件
- 第四步:运行vins
- 注意事项
运行步骤概括
- 下载相机驱动并编译
- 下载源码并编译
- 更新源码中的配置文件
- 运行vins
详细步骤
- 前前提条件:电脑上已经安装了Ubuntu、ROS、OpenCV
第一步:下载相机驱动并编译
mkdir -p ~/ROS_WORKSPACE/mynt_eye_sdk/src
cd ROS_WORKSPACE/mynt_eye_sdk/src
git clone https://github.com/slightech/MYNT-EYE-S-SDK.git
cd MYNT-EYE-S-SDK
make ros
echo "~/ROS_WORKSPACE/mynt_eye_sdk/devel/setup.bashrc:>>~/.bashrc
source ~/.bashrc
第二步:下载源码并编译
mkdir -p ~/ROS_WORKSPACE/vins_mono_mynt_eye/src
cd ROS_WORKSPACE/vins_mono_mynt_eye/src
git clone https://github.com/slightech/MYNT-EYE-VINS-Sample.git
cd ..
catkin_make
echo "~/ROS_WORKSPACE/vins_mono_mynt_eye/devel/setup.bashrc
source ~/.bashrc
第三步:更新源码中的配置文件
3.1 获得相机与IMU参数
-
获取相机参数
cd ROS_WORKSPACE/mynt_eye_sdk
make samples #编译sdk文件的sample
./samples/_output/bin/tutorials/get_img_params #获得相机的参数
-
获得的相机参数为:
#相机内参
left: {
pinhole,
width: 752,
height: 480,
fx: 358.17549797746926288
fy: 359.24666800723582583
cx: 388.61747233659593803
cy: 240.16748092953034188
model: 0,
coeffs: [-0.25326343297436710, 0.04841619345004276, 0.00059805649233287, -0.00153479593317240, 0.00000000000000000]}
right: {
pinhole,
width: 752,
height: 480,
fx: 365.57553526747392425,
fy: 365.54425241123698243,
cx: 369.96980098269671089,
cy: 230.17462048185933554,
model: 0,
coeffs: [-0.30954460737697198, 0.08688922042475018, 0.00020528773279130, 0.00016894963631214, 0.00000000000000000]}
#相机外参
Extrinsics
right to left:
{rotation: [
0.99946790791265716, -0.00301528183741204, -0.03247782517560629,
0.00305611847196011, 0.99999460066266410, 0.00120780188953115,
0.03247400795377153, -0.00130641530915091, 0.99947172650678739],
translation: [121.15860396636720964, -0.18695081041847689, -2.23380732606506438]}
-
获取imu的参数
cd ROS_WORKSPACE/mynt_eye_sdk
./samples/_output/bin/tutorials/get_imu_params #获得imu参数
-
获得IMU参数为:
camera calib model: pinhole
Motion intrinsics:
{accel:
{scale:
[
1, 0, 0,
0, 1, 0,
0, 0, 1
],
drift: [0., 0, 0],
noise: [0.01692543239797352, 0.01673531019556103, 0.01745248750459097],
bias: [0.00019031356589715, 0.00016996777864587, 0.00054490537096494]},
gyro: {
scale:
[
1, 0, 0,
0, 1, 0,
0, 0, 1
],
drift: [0, 0, 0],
noise: [0.00108480261588199, 0.00124663678835018, 0.00110032299198064],
bias: [0.00002340483413674, 0.00002359677156776, 0.00001497041805633]}}
Motion extrinsics left to imu: {
rotation: [
-0.00646620000000000, -0.99994994000000004, -0.00763565000000000,
0.99997908999999996, -0.00646566000000000, -0.00009558000000000,
0.00004620000000000, -0.00763611000000000, 0.99997084000000003
],
translation: [0.00533646000000000, -0.04302922000000000, 0.02303124000000000]}
3.2: 修改源代码的参数文件
需要修改的文件为:~/ROS_WORKSPACE/vins_mono_mynt_eye/src/config/mynteye/mynteye_s_config
-
相机投影参数
fx、fy、cx、cy
-
相机畸变参数
coeffs[5]=[k1,k2,p1,p2,k3]
-
imu噪声以及随机游走参数
得到的参数是3维的,但是源码的参数文件的数据只有一维?
第四步:运行vins
- 启动相机
source ~/ROS-WORKSPACE/mynt_eye_sdk/src/wrappers/ros/devel/setup.bash
roslaunch mynt_eye_ros_wrapper mynteye.launch
- 运行VINS-Mono
cd ~/ROS-WORKSPACE/vins_mono_mynt_eye
source devel/setup.bashrc
roslaunch vins_estimator mynteye_s.launch #注意这一句,有一个小尾巴s
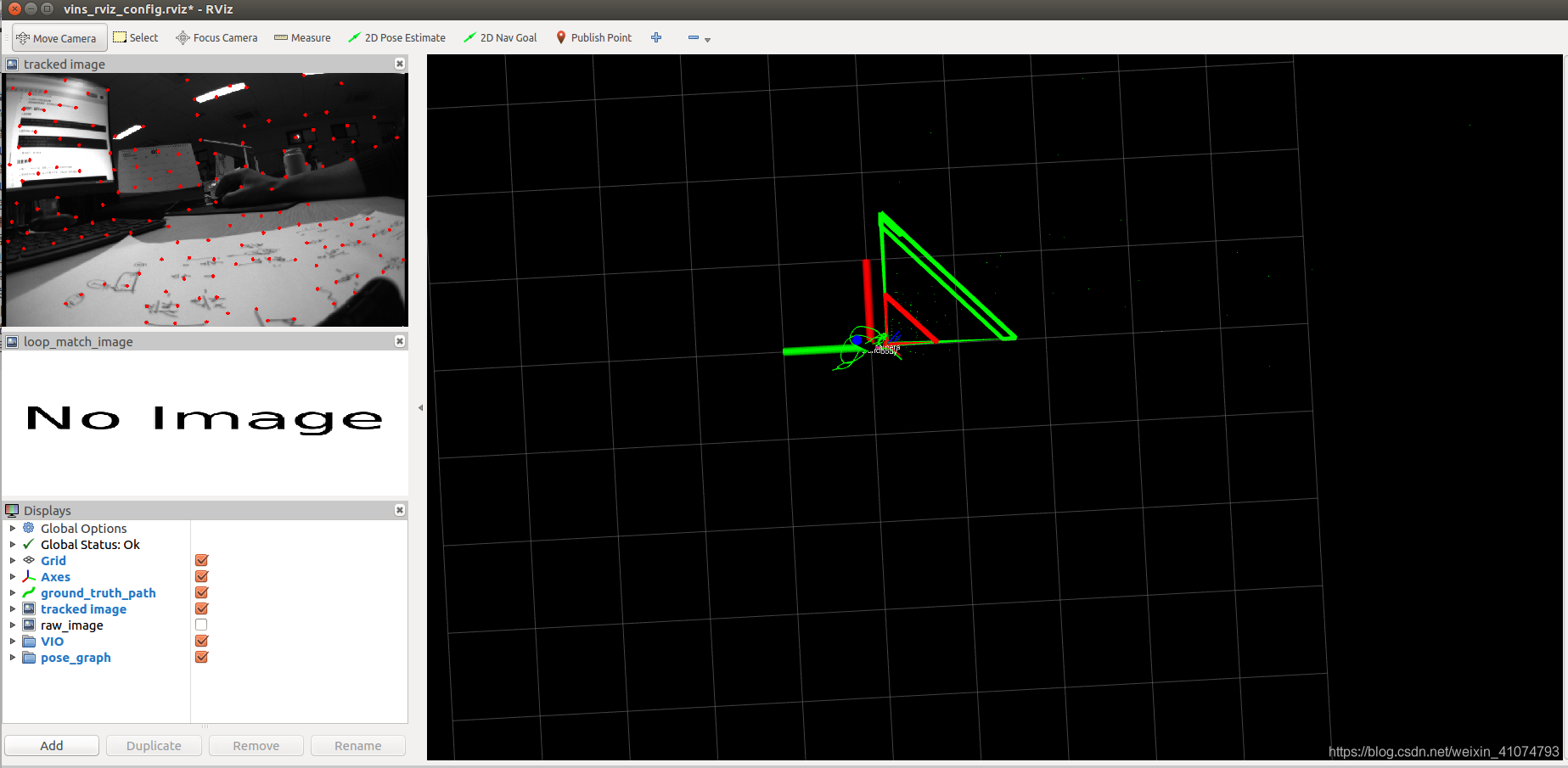
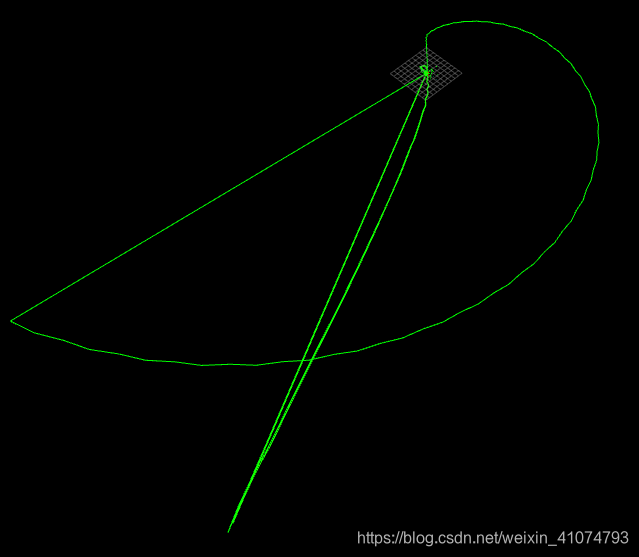
- 成功运行,得到结果
注意事项
- 每开一个新的终端,都要source一遍,否则找不到包
- 初始化的时候,相机晃动不要太厉害,否则运行的时候会漂移
- 更详细请参考:https://github.com/slightech/MYNT-EYE-VINS-Sample
- 安装小觅SDK详细步骤请参考:https://github.com/slightech/MYNT-EYE-S-SDK
- VINS-Mono源码网址:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)