1 编译PX4
1.1 编译对应的代码
教程链接:https://docs.px4.io/main/zh/dev_setup/building_px4.html
由于我使用的是pixhawk 2.4.8,应该使用以下命令:
cd /home/…/PX4-AutoPilot
make px4_fmu-v2_default
编译结束后,可以看到build文件夹内的生成的代码。
1.2 将代码烧录到飞控板上
飞控板使用USB连接电脑,在make命令后附加upload命令,通过USB将编译好的二进制文件上传到自动驾驶仪硬件。
make px4_fmu-v2_default upload
1.3 VSCode
VSCode是官方支持(并推荐)的用于PX4开发的IDE。它易于设置,可用于模拟和硬件环境编译PX4。
1.4 QT creator
2 编写第一个入门程序(PX4-v1.13.*,失败)
找到源码: PX4-Autopilot/src/examples/px4_simple_app,可以查看PX4的基本结构。
2.1 编写px4_hello_sky.c代码
- 新建文件夹:
mkdir /home/…/PX4-AutoPilot/src/examples/px4_hello_sky
cd /home/…/PX4-AutoPilot/src/examples/px4_hello_sky
gedit px4_hello_sky.c
由于我们使用的是PX4开源代码,因此需要按照规则,添加注释以表示PX4的贡献。
/****************************************************************************
*
* Copyright (c) 2012-2022 PX4 Development Team. All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* 1. Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in
* the documentation and/or other materials provided with the
* distribution.
* 3. Neither the name PX4 nor the names of its contributors may be
* used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
* "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
* LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
* FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
* COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
* BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
* OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
* AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
* ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*
****************************************************************************/
再添加头部注释:
/**
* @file px4_simple_app.c
* Minimal application example for PX4 autopilot
*
* @author Example User <mail@example.com>
*/
代码:
#include <px4_platform_common/log.h>
__EXPORT int px4_hello_sky_main(int argc, char *argv[]);
int px4_hello_sky_main(int argc, char *argv[])
{
PX4_INFO("Hello Sky!");
return OK;
}
函数必须以<module_name>_main格式命名并从模块中导出__EXPORT。
提示:PX4_INFO相当于输出到PX4 shell的printf(包含在px4_platform_common/log.h中)。 这里有不同的日志级别:PX4_INFO、PX4_WARN、PX4_ERR、PX4_DEBUG。 警告和错误会额外添加到ULog并显示在Flight Review 中。
2.2 编写名为CMakeLists.txt的CMake定义文件
在px4_hello_sky这个文件夹下:
gedit CMakeLists.txt
复制以下文本到.txt内:
############################################################################
#
# Copyright (c) 2015 PX4 Development Team. All rights reserved.
#
# Redistribution and use in source and binary forms, with or without
# modification, are permitted provided that the following conditions
# are met:
#
# 1. Redistributions of source code must retain the above copyright
# notice, this list of conditions and the following disclaimer.
# 2. Redistributions in binary form must reproduce the above copyright
# notice, this list of conditions and the following disclaimer in
# the documentation and/or other materials provided with the
# distribution.
# 3. Neither the name PX4 nor the names of its contributors may be
# used to endorse or promote products derived from this software
# without specific prior written permission.
#
# THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
# "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
# LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
# FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
# COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
# INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
# BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS
# OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED
# AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
# LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
# ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
# POSSIBILITY OF SUCH DAMAGE.
#
############################################################################
px4_add_module(
MODULE examples__px4_hello_sky
MAIN px4_hello_sky
STACK_MAIN 2000
SRCS
px4_hello_sky.c
DEPENDS
)
注意:
px4_add_module() 方法根据模块描述生成静态库。MODULE块是模块的唯一固件名称(按照惯例,模块名称的前缀是src之后的父路径)MAIN块列出了模块的入口点,它将命令注册到 NuttX,以便可以从 PX4 shell 或 SITL 控制台调用它。px4_add_module() 文件格式在 PX4-Autopilot/cmake/px4_add_module.cmake 里有明确说明。 为了实现这一功能,我们使用了 POSIX 系统调用函数 poll() 。- 如果您对
px4_add_module指定DYNAMIC选项,则会在 POSIX 平台上创建一个动态库而不是静态库(这些可以在无需重新编译 PX4 的情况下加载,并作为二进制文件而不是源代码共享给其他人)。 您的应用程序不会成为内置命令,而是生成一个名为examples__px4_simple_app.px4mod的文件。 您可以通过在运行时使用以下dyn命令加载文件来运行您的命令:dyn ./examples__px4_simple_app.px4mod
2.3 建立Kconfig文件
在相同文件夹内,创建一个名为Kconfig的Kconfig定义文件:
gedit Kconfig
复制以下内容到文件内:
bool "PX4 Hello sky"
default n
---help---
Enable PX4 hello sky
2.4 编译文件
2.4.1 添加到编译
编写文件到此为止,以下需要编译应用程序/固件。为了运行它,您首先需要确保它是作为 PX4 的一部分构建的。 应用程序被将依据目标的适当板级cmake文件添加到编译/固件中:
- PX4 SITL (仿真器):
PX4-Autopilot/boards/px4/sitl/default.px4board - Pixhawk v1/2:
PX4-Autopilot/boards/px4/fmu-v2/default.px4board - Pixracer (px4/fmu-v4):
PX4-Autopilot/boards/px4/fmu-v4/default.px4board - px4board files for other boards can be found in
PX4-Autopilot/boards/
在相应的.px4board文件中添加相应的Kconfig密钥CONFIG_EXAMPLES_PX4_HELLO_SKY=y(推荐)
或执行boardconfig make px4_fmu-v2_default boardconfig:
examples --->
[x] PX4 Hello sky ----
- 编译Pixhawk v2: 在
.../PX4-AutoPilot/boards/px4/fmu-v2/default.px4board文件最后一行添加了CONFIG_EXAMPLES_PX4_HELLO_SKY=y,如下图所示。

- 编译PX4 SITL (仿真器):在
.../PX4-AutoPilot/boards/px4/sitl/default.px4board文件最后一行添加了CONFIG_EXAMPLES_PX4_HELLO_SKY=y。
2.4.2 编译
使用特定板的命令构建示例:
jMAVSim 模拟器: make px4_sitl_default jmavsim
Gazebo模拟器:make px4_sitl_default gazebo
Pixhawk v1/2:make px4_fmu-v2_default(或者仅使用make px4_fmu-v2)
Pixhawk v3: make px4_fmu-v4_default
其它板: 构建代码
2.5 SITL测试
编译完px4_sitl_default后,可以看到下图:
在pxh>后输入:help
2.6 测试应用(硬件)
2.6.1 将固件上传至飞控板
启用上传器,然后重启飞控板:
Pixhawk v1/2: make px4_fmu-v2_default upload
Pixhawk v3: make px4_fmu-v4_default upload
重启飞控板之前,它应该打印一些编译消息,并在最后打印:
Loaded firmware for X,X, waiting for the bootloader…
一旦飞控板被重启并完成了固件的上传,命令行界面将输出:
Erase : [] 100.0%
Program: [] 100.0%
Verify : [====================] 100.0%
Rebooting.
[100%] Built target upload
2.5.2 连接至控制台
现在通过串口或USB连接到系统控制台。 按ENTER将调出 shell 提示:
nsh>
输入“help”并按回车键,查看命令:
nsh> help
help usage: help [-v] [<cmd>]
[ df kill mkfifo ps sleep
? echo losetup mkrd pwd test
cat exec ls mh rm umount
cd exit mb mount rmdir unset
cp free mkdir mv set usleep
dd help mkfatfs mw sh xd
Builtin Apps:
reboot
perf
top
..
px4_hello_sky
..
sercon
serdis
请注意,px4_hello_sky现在是可用命令的一部分。 通过键入px4_hello_sky并输入回车启动它:
3 编写第一个入门程序(PX4-v1.12.3,成功)
3.1 编写px4_hello_sky.c代码
- 新建文件夹和.c文件
文件夹名为:px4_hellosky,.c文件名为:px4_hellosky.c
mkdir /home/…/PX4-AutoPilot/src/examples/px4_hellosky
cd /home/…/PX4-AutoPilot/src/examples/px4_hellosky
gedit px4_hellosky.c
- 输入代码:
#include <px4_platform_common/log.h>
__EXPORT int px4_hellosky_main(int argc, char *argv[]);
int px4_hellosky_main(int argc, char *argv[])
{
PX4_INFO("Hello Sky!");
return 0;
}
- 创建Cmake文件,名称为:
CmakeLists.txt
终端输入:
gedit CmakeLists.txt
- CmakeLists.txt输入代码:
px4_add_module(
MODULE examples__px4_hellosky
MAIN px4_hellosky
SRCS
px4_hellosky.c
DEPENDS
)
注意:
MODULE后面为上一级文件夹名称和这一级文件夹名称,中间用两个“_”隔开。MAIN后面为这一级文件夹名称SRCS后面为.c文件名称。
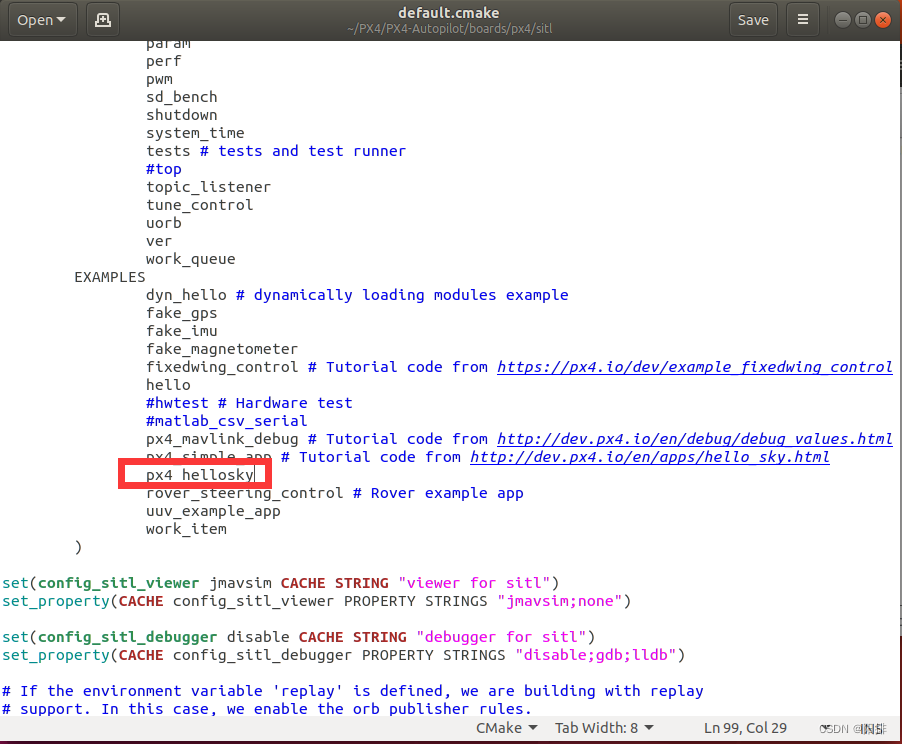
5.进入…/PX4-Autopilot/boards/px4/sitl/文件夹
打开default.cmake文件:
在EXAMPLES下添加:px4_hellosky这个文件夹名称
3.2 编译仿真
- 在…/PX4-Autopilot/目录下,打开终端:
make px4_sitl_default jmavsim
-
打开QGC
-
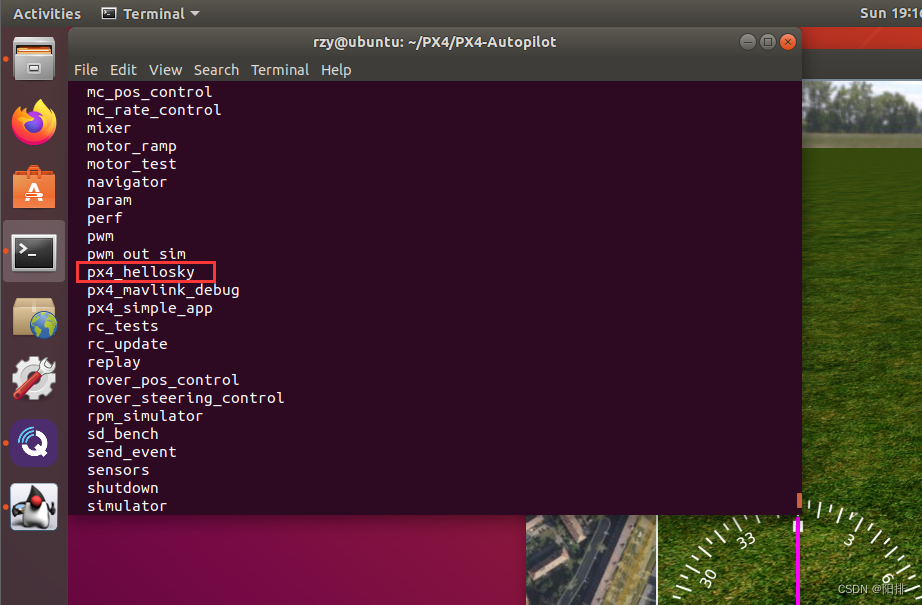
等到初始化完成后,在终端输入:
help
就可以看到自己刚刚编写的第一个程序px4_hellosky
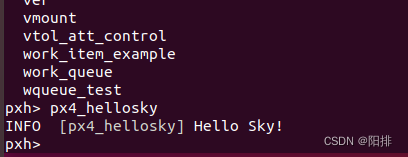
- 输入
px4_hellosky就可以看到INFO输出信息:Hello Sky!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)