2、线性SVM与Softmax分类器
鉴于kNN的分类弊端,本节介绍一种新的分类器,其中由两个很重要的概念:
得到损失函数之后,我们就将问题转化为一个最优化的问题,目标是得到让我们的损失函数取值最小的一组参数。
2.1 得分函数(score function)
首先我们定义一个有原始的图片像素值映射到最后类目得分的函数,也就是这里提到的得分函数。
假设我们的训练数据为$x_ i ∈R D
,对应的标签
,对应的标签
,对应的标签y_ i
,这里
,这里
,这里i=1…N $
表示
N
N
N个样本,$y _i ∈1…K $表示K类图片。
比如CIFAR-10数据集中N=50000,而D=32x32x3=3072像素,K=10,因为这时候我们有10个不同的类别(狗/猫/车…),我们实际上要定义一个将原始像素映射到得分上函数$ f:R ^D ↦R^ K $
2.1.1 线性分类器
简单的线性映射:$f(x _i ,W,b)=W x _i+b $
加到图像的像素都拉长为[D x 1]的列向量,两个参数W为[K x D],b为[K x 1],在CIFAR-10中,每张图片平展开得到一个[3072 x 1]的向量,那W就应该是一个[10 x 3072]的矩阵,b为[10 x 1]的向量。
说明几个点:
- 我们知道一次矩阵运算,我们就可以借助W把原始数据映射为10个类别的得分。
- 其实我们的输入(x i ,y i ) 其实是固定的,我们现在要做的事情是,我们要调整W, b使得我们的得分结果和实际的类目结果最为吻合。
- 我们可以想象到,这样一种分类解决方案的优势是,一旦我们找到合适的参数,那么我们最后的模型可以简化到只有保留W, b即可,而所有原始的训练数据我们都可以不管了。
- 识别阶段,我们需要做的事情仅仅是一次矩阵乘法和一次加法,这个计算量相对之前…不要小太多好么…
2.1.2 理解线性分类器
我们用一个实际的例子来表示这个得分映射的过程,大概就是下图这个样子:
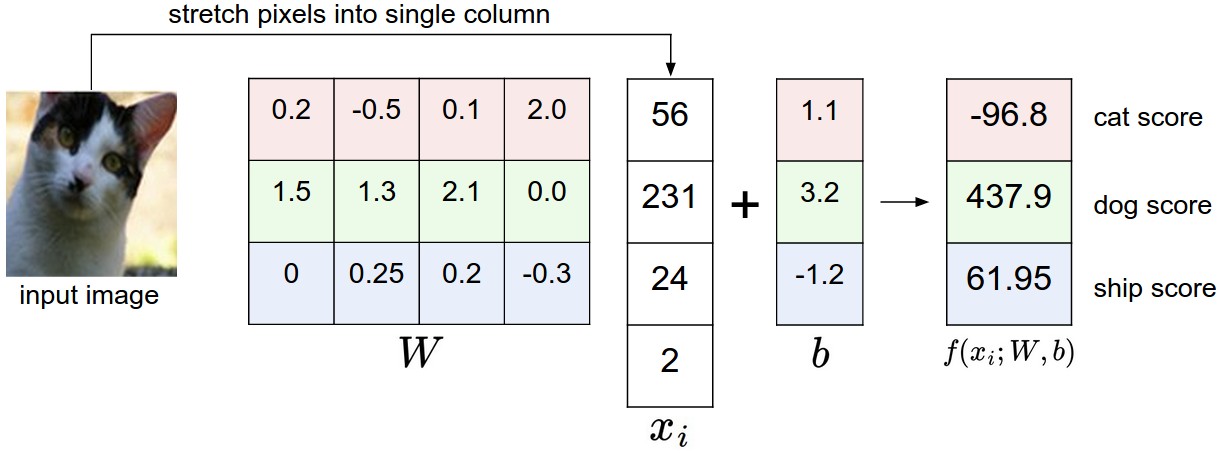
原始像素点向量x i 经过W和b映射为对应结果类别的得分f(x i ,W,b)=Wx i +b 。不过上面这组参数其实给的是不太恰当的,因为我们看到在这组参数下,图片属于狗狗的得分最高 -_-||
1)划分的第一种理解
图像被展平之后,向量维度很高,高维空间比较难以想象,简化,假设将图像的像素输入,看出可以压缩到二维空间之中的点,那我们想想,分类器其实就是在做下图所示的事情:
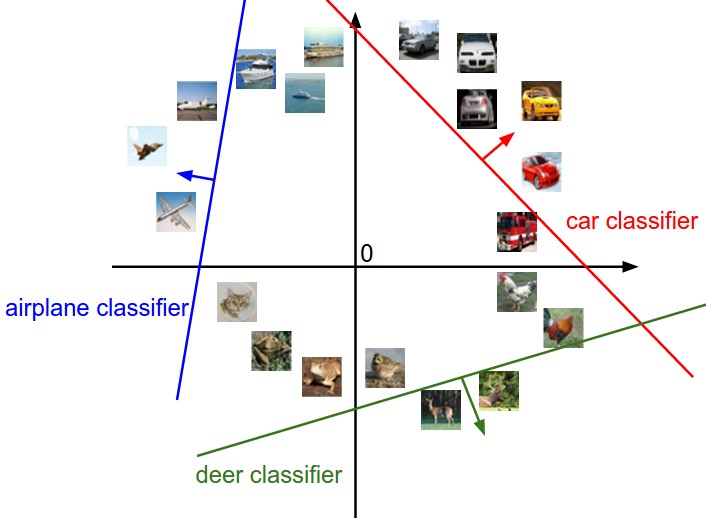
W中的每一列对应类别中的类,而当我们改变W中的值的时候,图上的线的方向会跟着改变。
b是一个偏移量,它表示当我们直线的方向确定之后,能够更适当的平移到合适的位置,如果没有b的话,所有的直线都会经过原点,这种强制条件下显然不能保证很好的平面类别分割。
2)划分的第二种理解
W的每一行可以看做是其中一个类别的模板,而我们输入图像相对这个类别的得分,实际上是像素点和模板匹配度(通过内积运算获得),而类目识别实际上就是在匹配图像和所有类别的模板中,找到匹配度最高的那个。
感觉和KNN有些类似,不过我们这里不再像KNN那样比对所有的图像,而是比对类别的模板,这样对比次数只和类目数k有关系,所以计算量会小很多,且不再使用L1 / L2距离,而是使用内积进行计算。
这里展示了CIFAR-10上学习到的模板的样子:

3)偏移量的处理
线性分类器:$f(x _i ,W,b)=W x _i+b $
公式中有W和b两个参数,我们知道调节两个参数比调节一个参数要麻烦很多,所以我们将其组合起来,放到一个参数中去。
我们现在要做的运算是矩阵乘法再加偏移量,最常用的合并方法就是将b加入W中:
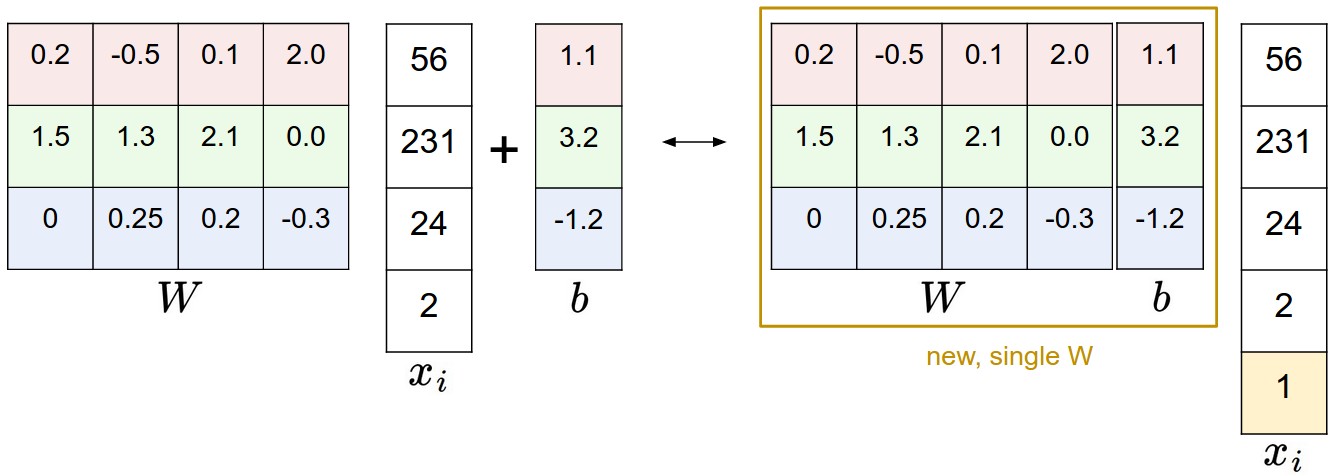
我们给输入的像素矩阵加上一个1,从而把b拼接到W里变成一个变量。依旧拿CIFAR-10举例,原本是[3072 x 1]的像素向量,我们添上最后那个1变成[3073 x 1]的向量,而[W]变成[W b]。
4)关于数据的预处理
实际应用中,我们很多时候并不是把原始的像素矩阵作为输入,而是会预先做一些处理,比如说,有一个很重要的处理叫做『去均值』,他做的事情是对于训练集,我们求得所有图片像素矩阵的均值,作为中心,然后输入的图片先减掉这个均值,再做后续的操作。有时候我们甚至要对图片的幅度归一化/scaling。去均值是一个非常重要的步骤,原因我们在后续的梯度下降里会提到。
2.2 损失函数
通过参数W和b可以完成由像素到类目得分的过程,同时,我们知道训练数据
(
x
i
,
y
i
)
(x_ i ,y_ i )
(xi,yi)是给定的,可以通过调整参数来使得映射的结果和实际的类别吻合。
上面预测猫、狗的例子中,预测的结果和实际结果相差很大,于是我们要想办法将这个偏差表示出来。
能够完成偏差表示的工具叫做**“损失函数”**,也就是当偏差很大的时候,损失函数值会很大,我们训练的目标就转化为最小化损失函数。
2.2.1 多类别支持向量机损失(Multiclass SVM loss)
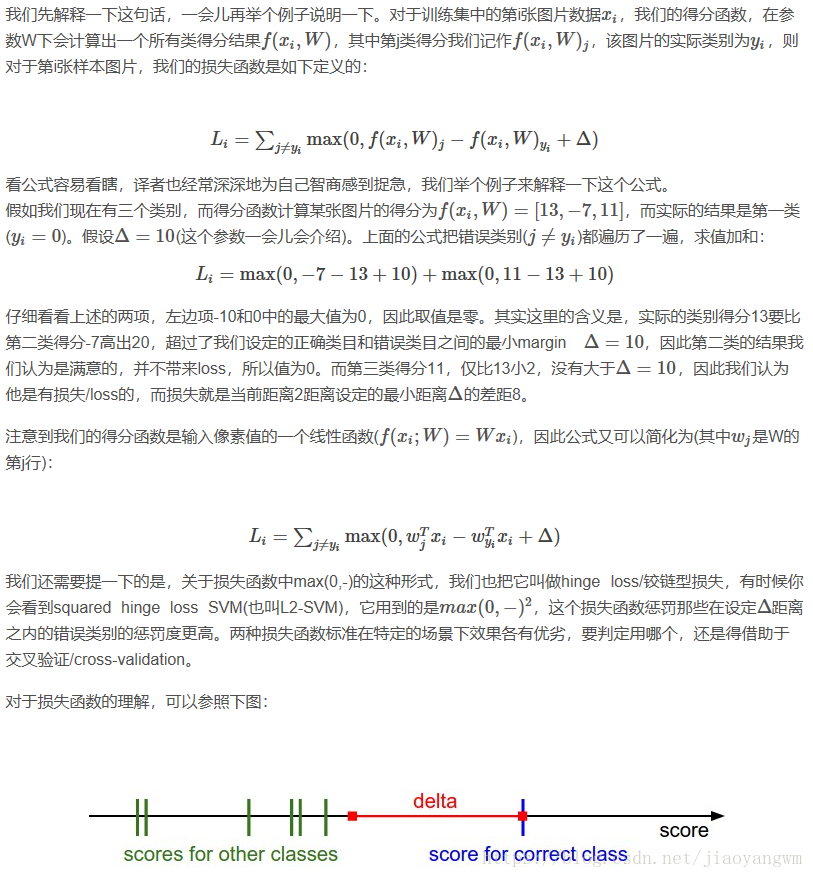
如果要用一句精简的话来描述它,就是它(SVM)希望正确的类别结果获得的得分比不正确的类别,至少要高上一个固定的大小Δ 。
2.2.2 正则化
把W参数的这种不确定性去除掉,这就是我们要提到的正则化,我们需要在原来的损失函数上再加上一项正则化项(regularization penalty R(W) ),最常见的正则化项是 L2 范数,它会对幅度很大的特征权重给很高的惩罚:
根据公式可以看到,这个表达式R(W)把所有W的元素的平方项求和了。而且它和数据本身无关,只和特征权重有关系。
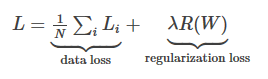
我们把两部分组(数据损失/data loss和正则化损失/regularization loss)在一起,得到完整的多类别SVM损失权重,如下:
也可以展开,得到更具体的完整形式:

其中,N是训练样本数,我们给正则化一个参数
λ
\lambda
λ,但是这个参数的设定只有通过实验确定,也就是通过交叉验证确定。
假定我们的输入图片像素矩阵是
x
=
[
1
,
1
,
1
,
1
]
x=[1,1,1,1]
x=[1,1,1,1] ,而现在我们有两组不同的W权重参数中对应的向量$w_ 1 =[1,0,0,0]
,
,
,w _2 =[0.25,0.25,0.25,0.25]
。那我们很容易知道
。那我们很容易知道
。那我们很容易知道w ^T 1 x=w^ T 2 x=1
,所以不加正则项的时候,这俩得到的结果是完全一样的,也就意味着——它们是等价的。但是加了正则项之后,我们发现
,所以不加正则项的时候,这俩得到的结果是完全一样的,也就意味着——它们是等价的。但是加了正则项之后,我们发现
,所以不加正则项的时候,这俩得到的结果是完全一样的,也就意味着——它们是等价的。但是加了正则项之后,我们发现w _2
总体的损失函数结果更小
(
因为
4
∗
0.2
5
2
<
1
)
,于是我们的系统会选择
总体的损失函数结果更小(因为4*0.25^2<1),于是我们的系统会选择
总体的损失函数结果更小(因为4∗0.252<1),于是我们的系统会选择w _2 $ ,这也就意味着系统更『喜欢』权重分布均匀的参数,而不是某些特征权重明显高于其他权重(占据绝对主导作用)的参数。
之后的系列里会提到,这样一个平滑的操作,实际上也会提高系统的泛化能力,让其具备更高的通用性,而不至于在训练集上过拟合。
另外,我们在讨论过拟合的这个部分的时候,并没有提到b这个参数,这是因为它并不具备像W一样的控制输入特征的某个维度影响力的能力。还需要说一下的是,因为正则项的引入,训练集上的准确度是会有一定程度的下降的,我们永远也不可能让损失达到零了(因为这意味着正则化项为0,也就是W=0)。
2.3 实际中的考虑点
2.3.1 设定Delta
我们在计算Multi SVM loss的时候,Δ是我们提前设定的一个参数。这个值咋设定?莫不是…也需要交叉验证…?其实基本上大部分的场合下我们设Δ=1.0 都是一个安全的设定。我们看公式中的参数Δ 和λ似乎是两个截然不同的参数,实际上他俩做的事情比较类似,都是尽量让模型贴近标准预测结果的时候,在 数据损失/data loss和 正则化损失/regularization loss之间做一个交换和平衡。
在损失函数计算公式里,可以看出,权重W的幅度对类别得分有最直接的影响,我们减小W,最后的得分就会减少;我们增大W,最后的得分就增大。从这个角度看,Δ 这个参数的设定(Δ=1 或者Δ=100 ),其实无法限定W的伸缩。而真正可以做到这点的是正则化项,λ 的大小,实际上控制着权重可以增长和膨胀的空间。
2.3.2 关于二元(Binary)支持向量机
二元支持向量机的公式如下:

我们可以理解为类别
y
i
∈
−
1
,
1
y i ∈−1,1
yi∈−1,1 ,它是我们的多类别识别的一个特殊情况,而这里的
C
C
C和
λ
λ
λ是一样的作用,只不过他们的大小对结果的影响是相反的,也就是$C∝1/λ $。
2.3.3 关于非线性SVM
如果对机器学习有了解,你可能会了解很多其他关于SVM的术语:kernel,dual,SMO算法等等。在这个系列里面我们只讨论最基本的线性形式。当然,其实从本质上来说,这些方法都是类似的。
2.4 Softmax分类器
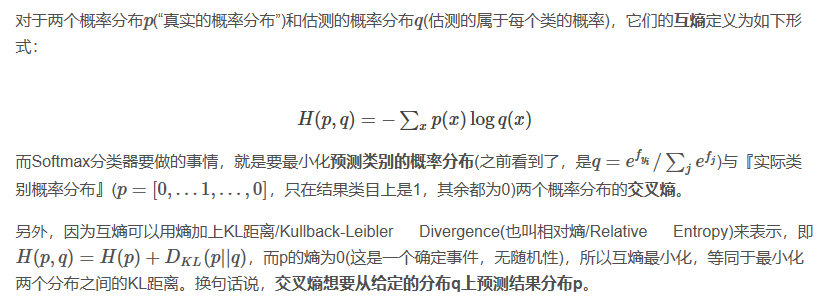
两种最常见的分类器,包括SVM和Softmax,它们有着截然不同的损失函数,softmax分类器就是逻辑回归二分类器泛化到多类的情形,不像SVM直接给类目打分$f(x_ i ,W) $并作为输出,softmax分类器从新的角度做了不一样的处理,即需要将得分映射到概率域,不使用hinge loss了,而是用交叉熵损失函数:

其中,使用
f
i
f_i
fi来表示分向量
f
f
f的第j个元素值,总体的损失也是
L
i
L_i
Li遍历训练集之后的均值,再加上正则化项
R
(
W
)
R(W)
R(W),而函数
f
j
(
z
)
=
e
z
j
∑
k
e
z
k
f _j (z)=\frac{e^z j }{ ∑_ k e^ {z _k} }
fj(z)=∑kezkezj 被称为softmax函数,其输入值是一个实数向量
z
z
z,然后在指数域做了一个归一化,保证其和为1,映射为概率。
2.4.1 从信息论角度理解
2.4.2 从概率角度理解
2.4.3 实际工程的注意点:数据稳定性

f = np.array([123, 456, 789]) # 3个类别的预测示例
p = np.exp(f) / np.sum(np.exp(f)) # 直接运算,数值稳定性不太好
# 我们先对数据做一个平移,所以输入的最大值为0:
f -= np.max(f) # f 变成 [-666, -333, 0]
p = np.exp(f) / np.sum(np.exp(f)) # 结果正确,同时解决数值不稳定问题
2.4.4 softmax名字的说明
准确地说,SVM分类器使用hinge loss(有时候也叫max-margin loss)。而Softmax分类器使用交叉熵损失/cross-entropy loss。Softmax分类器从softmax函数(恩,其实做的事情就是把一列原始的类别得分归一化到一列和为1的正数表示概率)得到,softmax函数使得交叉熵损失可以用起来。而实际上,我们并没有softmax loss这个概念,因为softmax实质上就是一个函数,有时候我们图方便,就随口称呼softmax loss。
2.5 SVM与Softmax
2.5.1 损失函数
下图是表示从输入端到分类结果的过程中,两者分别做了什么工作:
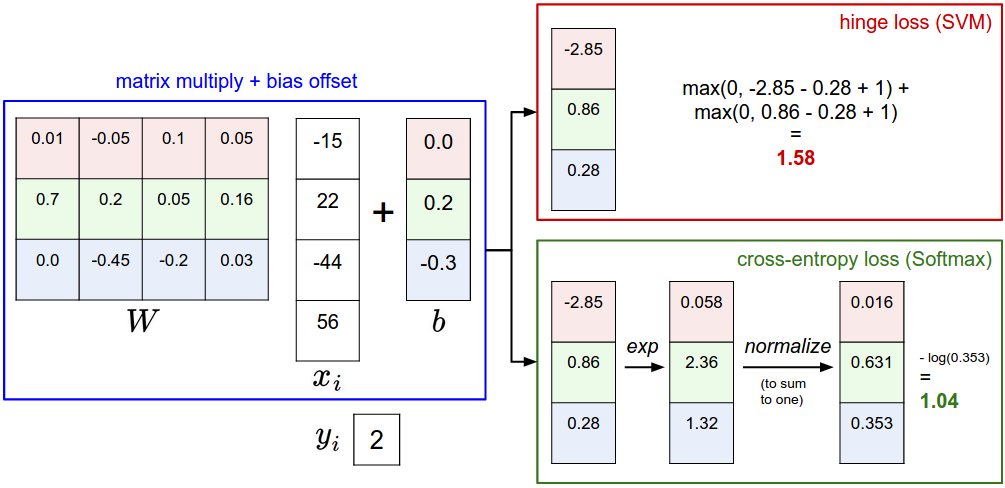
区别就是拿到原始像素数据映射得到的得分之后的处理,而正因为处理方式不同,我们定义不同的损失函数,有不同的优化方法。
2.5.2 分类器的本质
举个例子说,SVM可能拿到对应 猫/狗/船 的得分[12.5, 0.6, -23.0],同一个问题,Softmax分类器拿到[0.9, 0.09, 0.01]。这样在SVM结果下我们只知道『猫』是正确答案,而在Softmax分类器的结果中,我们可以知道属于每个类别的概率。
但是,Softmax中拿到的概率,其实和正则化参数λ 有很大的关系,因为λ 实际上在控制着W的伸缩程度,所以也控制着最后得分的scale,这会直接影响最后概率向量中概率的『分散度』,比如说某个λ下,我们得到的得分和概率可能如下:
[
1
,
−
2
,
0
]
→
[
e
1
,
e
−
2
,
e
0
]
=
[
2.71
,
0.14
,
1
]
→
[
0.7
,
0.04
,
0.26
]
[1,−2,0]→[e ^1 ,e^{ −2} ,e ^0 ]=[2.71,0.14,1]→[0.7,0.04,0.26]
[1,−2,0]→[e1,e−2,e0]=[2.71,0.14,1]→[0.7,0.04,0.26]
而我们加大λ ,提高其约束能力后,很可能得分变为原来的一半大小,这时候如下:
[
0.5
,
−
1
,
0
]
→
[
e
0.5
,
e
−
1
,
e
0
]
=
[
1.65
,
0.37
,
1
]
→
[
0.55
,
0.12
,
0.33
]
[0.5,−1,0]→[e ^{0.5} ,e^{ −1} ,e ^0 ]=[1.65,0.37,1]→[0.55,0.12,0.33]
[0.5,−1,0]→[e0.5,e−1,e0]=[1.65,0.37,1]→[0.55,0.12,0.33]
因为λ的不同,使得最后得到的结果概率分散度有很大的差别。在上面的结果中,猫有着统治性的概率大小,而在下面的结果中,它和船只的概率差距被缩小。
2.5.3 实际应用中的SVM与Softmax分类器
实际应用中,两类分类器的表现是相当的。当然,每个人都有自己的喜好和倾向性,习惯用某类分类器。
一定要对比一下的话:
SVM其实并不在乎每个类别得到的绝对得分大小,举个例子说,我们现在对三个类别,算得的得分是[10, -2, 3],实际第一类是正确结果,而设定Δ=1 ,那么10-3=7已经比1要大很多了,那对SVM而言,它觉得这已经是一个很标准的答案了,完全满足要求了,不需要再做其他事情了,结果是 [10, -100, -100] 或者 [10, 9, 9],它都是满意的。
然而对于Softmax而言,不是这样的, [10, -100, -100] 和 [10, 9, 9]映射到概率域,计算得到的交叉熵损失是有很大差别的。所以Softmax是一个永远不会满足的分类器,在每个得分计算到的概率基础上,它总是觉得可以让概率分布更接近标准结果一些,交叉熵损失更小一些。
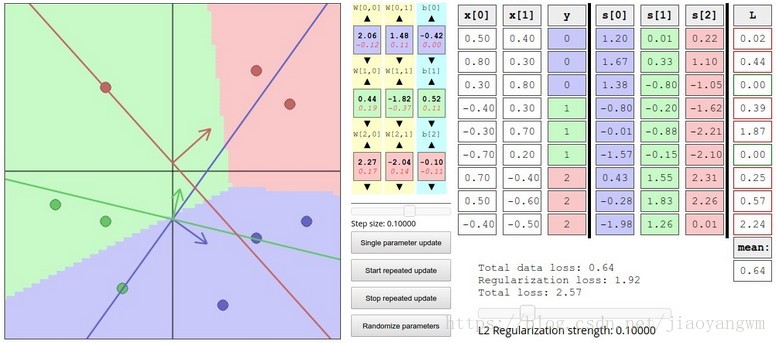
有兴趣的话,W与得分预测结果demo是一个可以手动调整和观察二维数据上的分类问题,随W变化结果变化的demo,可以动手调调看看。