牛顿法被称为牛顿-拉夫逊(Newton-Raphson)方法。牛顿在17世纪提出用来求解方程的根。
假设点x*位函数f(x)的根,则f(x*)=0。
将函数f(x)在点 处进行一阶泰勒展开有:
处进行一阶泰勒展开有:

假设点 为函数f(x)的根,则有:
为函数f(x)的根,则有:

那么可以得到: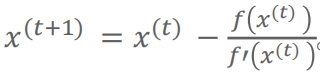
牛顿法通过迭代的方式求解方程f(x)=0的解。
牛顿法求解目标函数极值
对于最优化问题,极值点处函数的一阶导数为0
可以对一阶导数 利用牛顿法通过迭代的方式来求得最优解,即相当于求一阶导数对应函数的根。
利用牛顿法通过迭代的方式来求得最优解,即相当于求一阶导数对应函数的根。

牛顿法是二阶最优化算法。
对多元函数 ,一阶导数换成梯度:
,一阶导数换成梯度: ,二阶导数换成海森(Hessian)矩阵H,
,二阶导数换成海森(Hessian)矩阵H,

则牛顿法迭代公式为:
牛顿法求解目标函数极值步骤:
1、从t=0开始,初始化 为随机值;
为随机值;
2、计算目标函数f(x)在点 的梯度
的梯度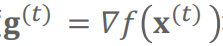 和海森矩阵
和海森矩阵 ;
;
3、计算移动方向: (一般用线性方程组计算
(一般用线性方程组计算 。线性方程组求解可用共轭梯度等方法求解)。
。线性方程组求解可用共轭梯度等方法求解)。
4、根据迭代公式,更新x的值: ;
;
5、判断是否满足迭代终止条件。如果满足,循环结束,返回最佳参数 和目标函数最小值
和目标函数最小值 ;否则转到第2步。
;否则转到第2步。
与一阶梯度法 ,移动方向为:
,移动方向为:
拟牛顿法
牛顿法比一般的梯度下降法收敛速度快。
但在高维情况下,计算目标函数的二阶偏导数的复杂度大,而且有时候目标函数的海森矩阵无法保持正定,不存在逆矩阵,此时牛顿法将不再能使用
因此,人们提出了拟牛顿法(Quasi-Newton Methods):不用二阶偏导数构造出可以近似Hessian矩阵(或Hessian矩阵的逆矩阵)的正定对称矩阵,进而再逐步优化目标函数。
不同的Hessian矩阵构造方法产生了不同的拟牛顿法:
BFGS/L-BFGS
拟牛顿条件
在t次迭代后,得到 。
。
将目标函数f(x)在 处进行二阶泰勒展开:
处进行二阶泰勒展开:

两边同时取梯度运算▽,得到

取 ,令
,令 ,
, ,则
,则

引入记号 ,
, ,则
,则
令B表示H的近似,D表示 的近似,根据
的近似,根据
得到拟牛顿条件为:
或: 。
。
BFGS
BFGS算法是Broyden,Fletcher,Goldfarb,Shanno四位研究者发明出来的,被认为是数值效果最好的拟牛顿法,并且具有全局收敛性和超线性收敛速度。
BFGS算法使用迭代法逼近Hessian矩阵:
初始值 为单位矩阵,因此关键是如何构造
为单位矩阵,因此关键是如何构造 。
。
为了保证矩阵B的正定性,令 ,代入
,代入



令 ,得到:
,得到:

将 代入
代入

得到:
不防令 ,代入
,代入
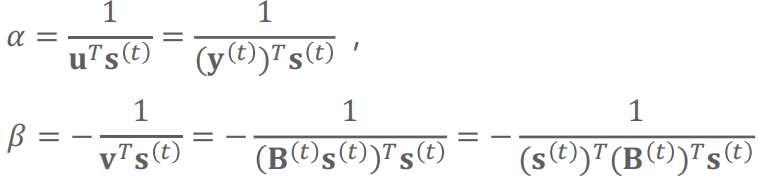
代入:
牛顿法中需要计算Hessian矩阵的逆矩阵。
根据Sherman-Morrison公式,可得到

Sherman-Morrison公式:若A为非奇异方阵, ,则
,则

BFGS更新参数的流程:
1、从t=0开始,初始化 ;
;
2、计算移动方向: ;
;
3、更新x的值:
4、
5、若 ,迭代终止;
,迭代终止;
6、计算: ;
;
7、t=t+1,转第2步。
L-BFGS
L-BFGS(limited memory BFGS)不直接存储Hessian矩阵,而是通过存储计算过程中产生的 和
和 来计算Hessian矩阵,从而减少参数存储所需空间。
来计算Hessian矩阵,从而减少参数存储所需空间。
BFGS中Hessian矩阵更新公式为:

令 ,
, ,
,
则:
展开:

一般地:

计算将 需要用到
需要用到 。如果只能存储m组
。如果只能存储m组 ,从0开始,可以计算
,从0开始,可以计算 。
。
要丢弃一部分 的话,丢弃较早生成的那些
的话,丢弃较早生成的那些 。
。
则计算 ,只存储了
,只存储了 ,丢弃了
,丢弃了 。
。
由于丢弃了部分信息,只能近似计算 。
。
当t>m+1时,构造近似公式:

计算 是为了得到搜索方向
是为了得到搜索方向 。
。
利用上面的公式,设计快速计算 的方法
的方法
1、初始化:
2、向后循环:
3、向前循环:
4、