联系方式:860122112@qq.com
一、实验目的
使用惯性测量单元IMU和磁场传感器(磁力计)的信息,通过EKF对四旋翼无人机进行姿态融合。
二、实验环境
ROS机器人操作系统
三、实验步骤
1. 安装hector quadrotor
hector quadrotor 是德国老牌理工学校Technische Universität Darmstadt大学开发的ros包,整合了ros和gazebo,可以进行uav相关的很多仿真实验,例如飞行动力学,机载传感器例如imu、gps、camera,复杂环境仿真,姿态融合,SLAM等等。
首先下载和编译hector quadrotor的ros包(注意自己安装的ros版本,这里用的是kinetic版)
~$ mkdir catkin_ws/src/hector_quadrotor_tutorial
~$ cd catkin_ws/src/hector_quadrotor_tutorial
$ wstool init src https://raw.github.com/tu-darmstadt-ros-pkg/hector_quadrotor/kinetic-devel/tutorials.rosinstall
$ cd ../..
~/catkin_ws$ catkin_make
~/catkin_ws$ source devel/setup.bash
然后可以启动launch文件(共有两个,一个是outdoor,一个是indoor)测试无人机了。
~/catkin_ws$ roslaunch hector_quadrotor_demo outdoor_flight_gazebo.launch
或者
~/catkin_ws$ roslaunch hector_quadrotor_demo indoor_slam_gazebo.launch
想要用键盘控制无人机首先要启动无人机的电机
$ rosservice call /enable_motors true
再启动键盘控制节点
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
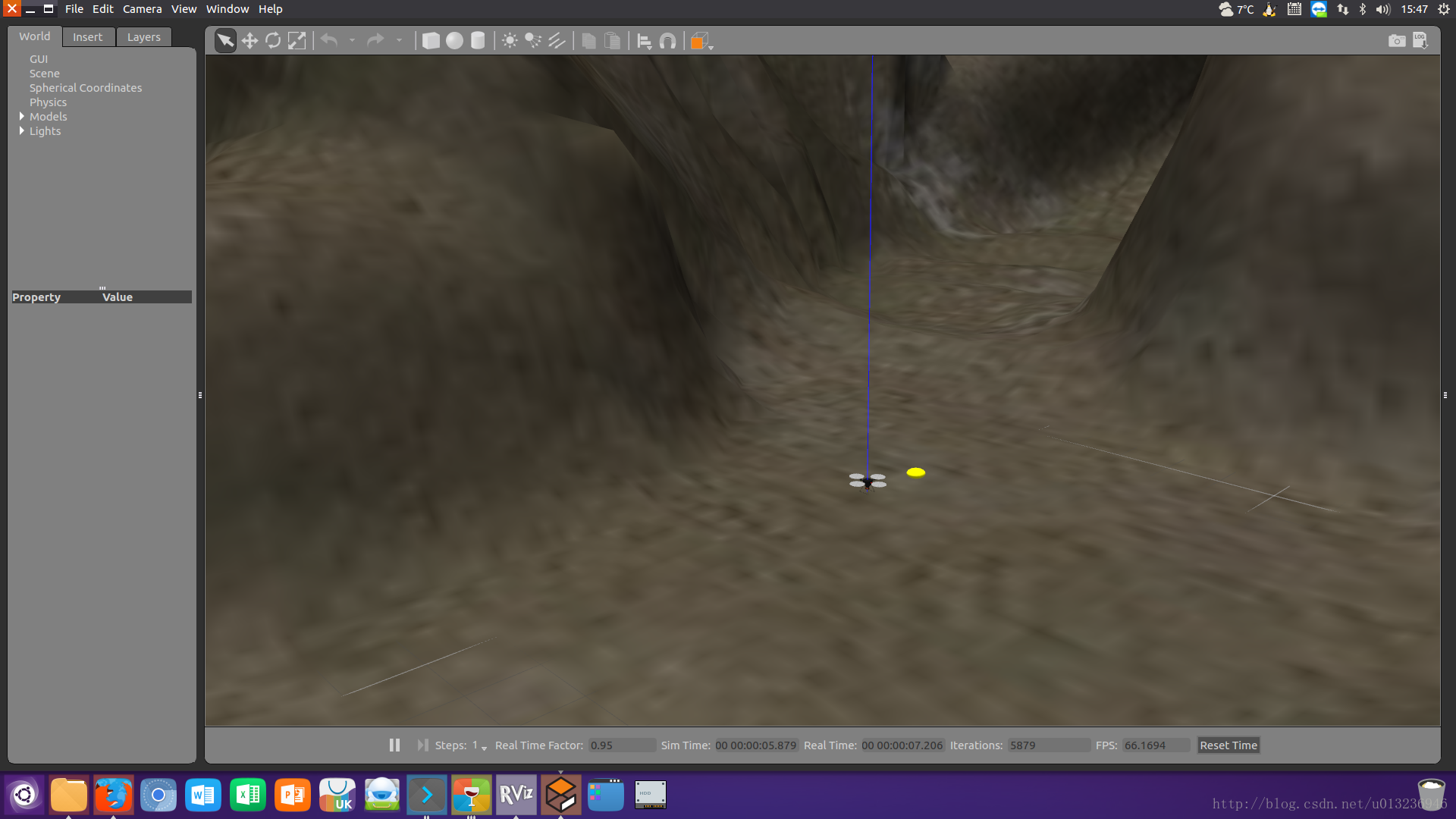
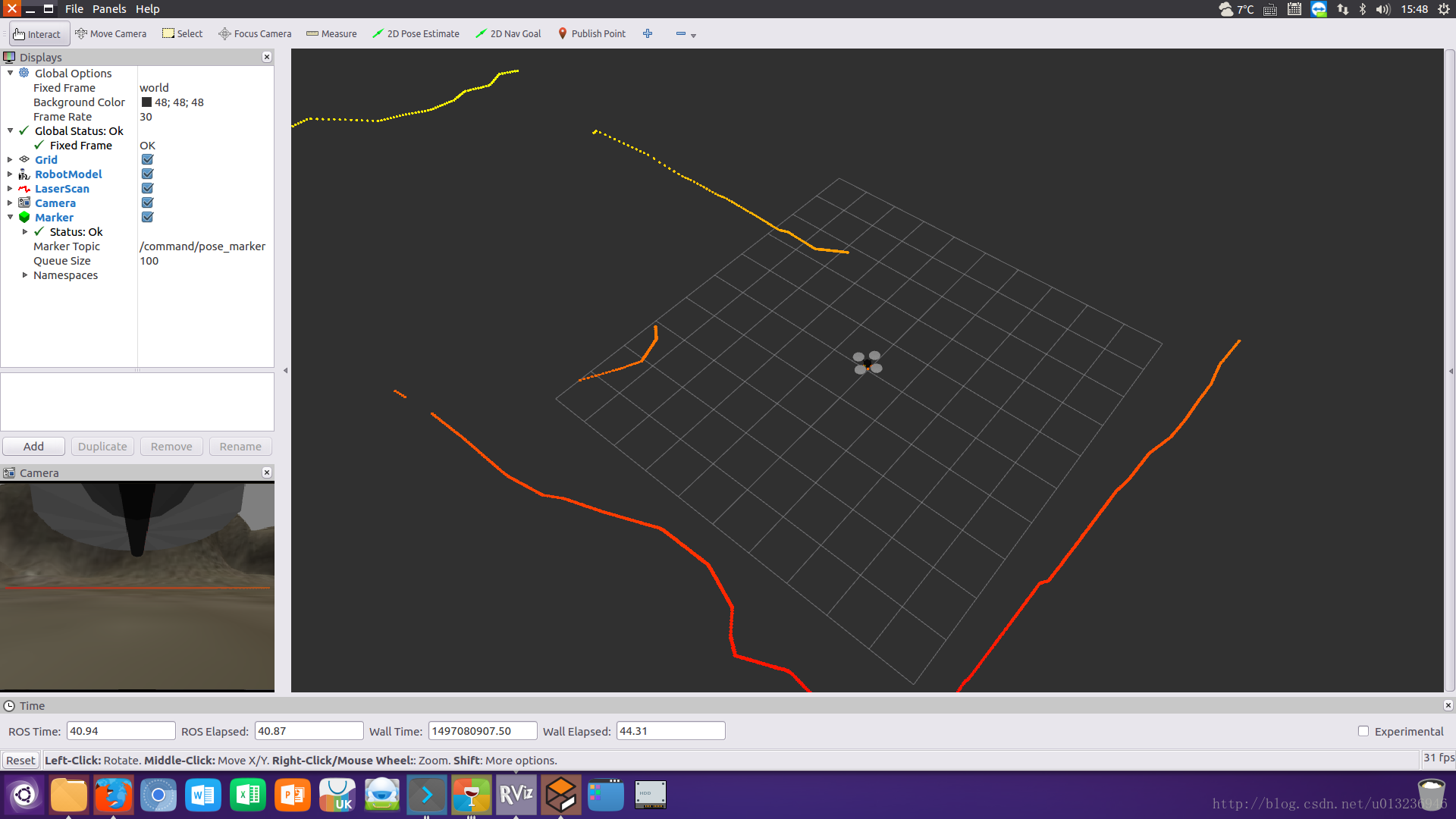
测试效果图
outdoor
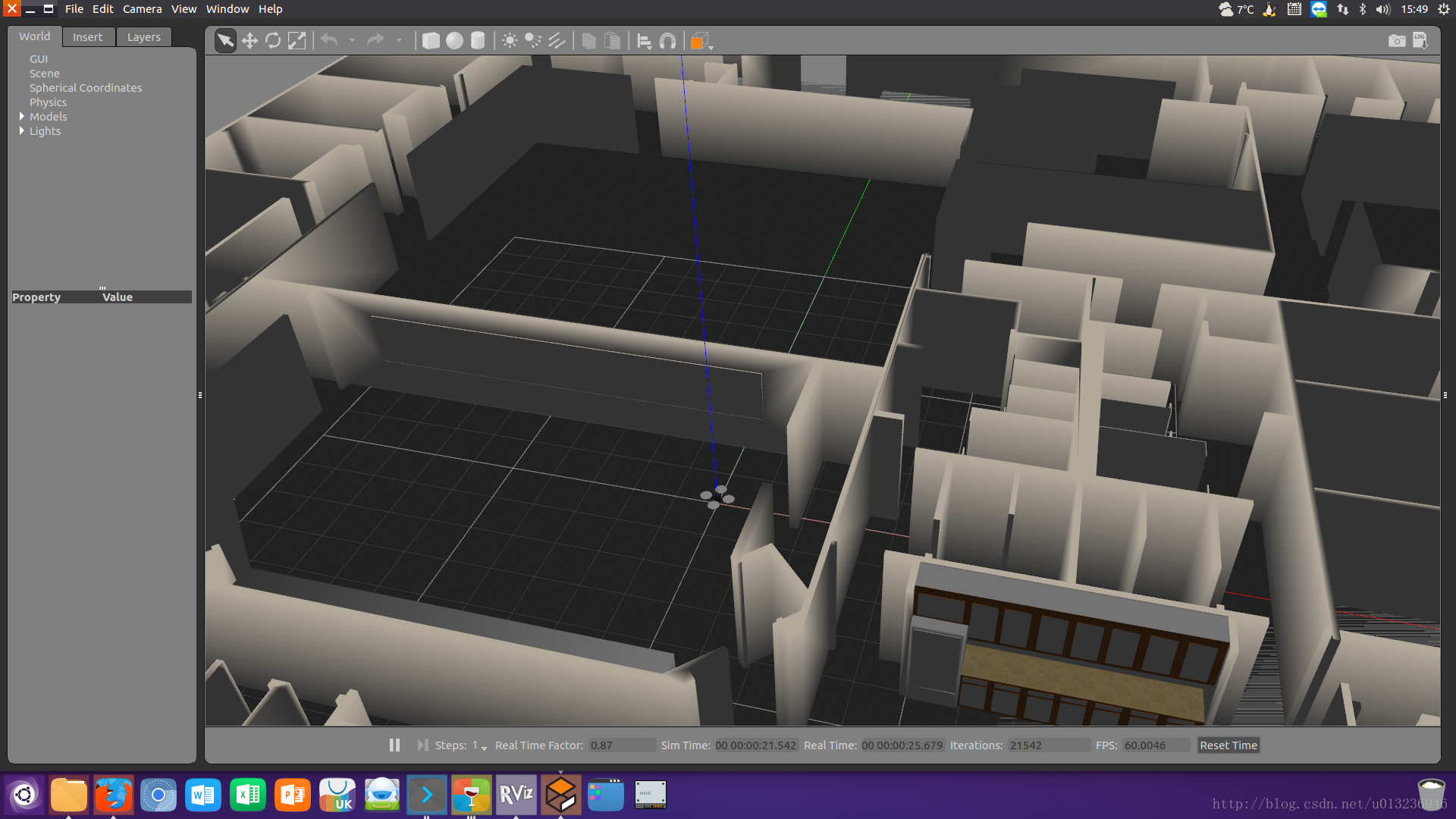
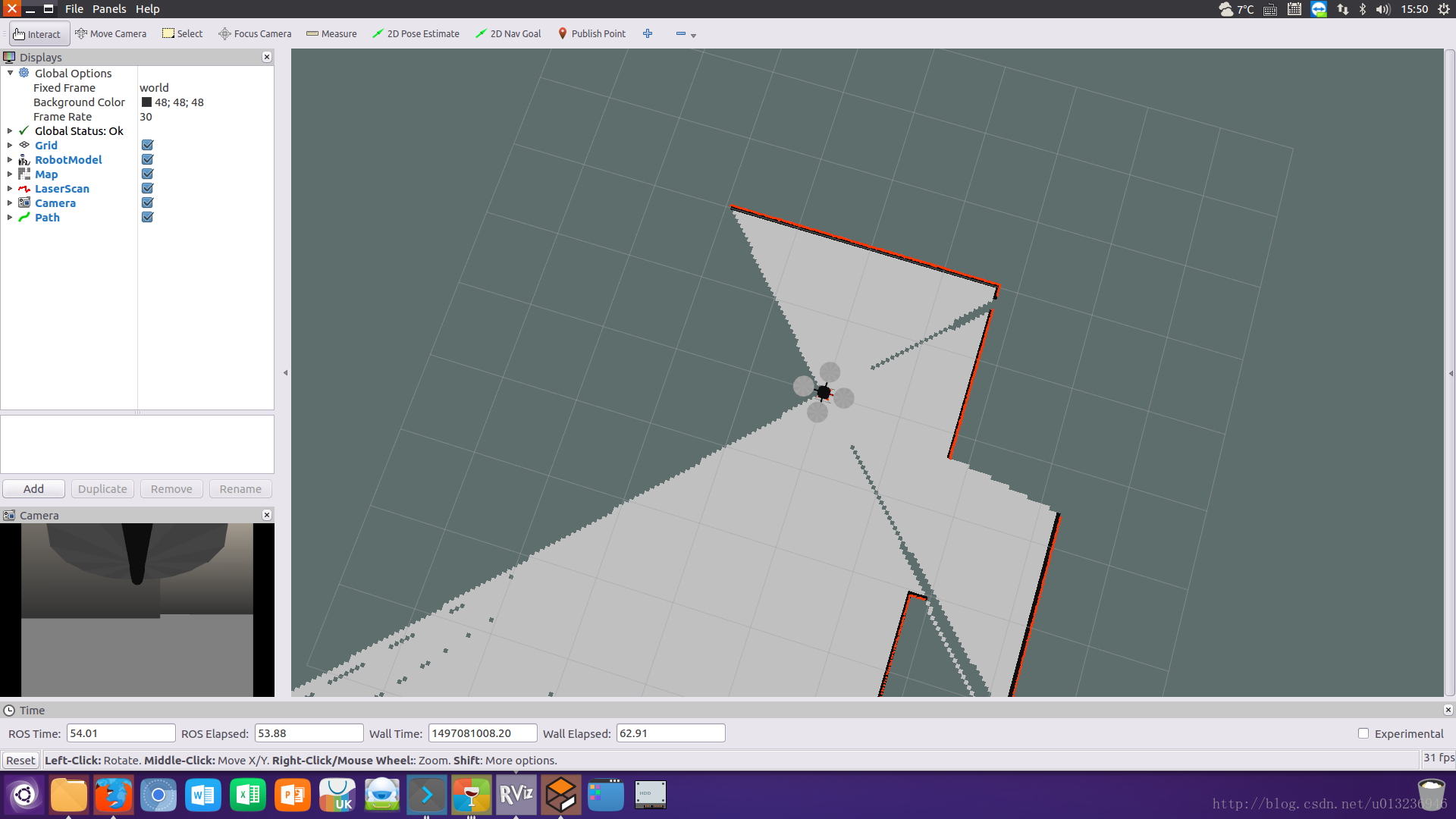
indoor
参考教程
2. EKF姿态融合
这里使用了两种EKF方法进行姿态融合
第一种的参考文献在此
第二种的参考文献在此
其中第二种基于四元数实现。
算法实现及使用:
首先下载和编译算法代码ros包
~$ cd catkin_ws/src/
~/catkin_ws/src$ git clone https://github.com/DajunZhou/uav_att_EKF.git
~/catkin_ws/src$ cd ..
~/catkin_ws$ catkin_make
~/catkin_ws$ source devel/setup.bash
启动测试环境(可以自己写一个empty world的测试环境):
~/catkin_ws$ roslaunch hector_quadrotor_demo outdoor_flight_gazebo.launch
~/catkin_ws$ roslaunch uav_att_EKF uav_att_est.launch
(上面使用了两个终端)
启动算法节点(因为是使用python实现,包含了自己实现的类,所以用python启动)
第一种算法
~/catkin_ws$ cd src/uav_att_EKF/scripts/
$ python uav_att_node.py
启动键盘控制
$ rosservice call /enable_motors true
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
姿态融合效果
src="http://player.youku.com/embed/XMjgxNDc1MzMzNg==" width="800" height="500">
第二种算法
~/catkin_ws$ cd src/uav_att_EKF/scripts/
$ python uav_att_2stageEKF_node.py
启动键盘控制
$ rosservice call /enable_motors true
$ rosrun teleop_twist_keyboard teleop_twist_keyboard.py
姿态融合效果
src="http://player.youku.com/embed/XMjgxNTYzMDU5Mg==" width="800" height="500">
四、结果分析
从视频上看,在旋转时,对于无人机的偏航角第一种方法比第二种方法响应更快,估计更准。分析原因:第一种算法使用加速度/磁力计矫正时,可同时对俯仰角、滚动角和偏航角进行矫正,且状态矩阵共12维,包含信息更多;第二种方法状态使用的是四元数,加速度计不矫正偏航角,磁力计只矫正偏航角,由于实验环境中IMU的频率是100Hz,磁力计是10Hz,所以无人机偏航角的估计会比较慢。但从计算量和计算时间的角度来说,第二种方法应该会优于第一种方法。
参考文献
Comprehensive Simulation of Quadrotor UAVs Using ROS and Gazebo
A Double-Stage Kalman Filter for Orientation Tracking With an Integrated Processor in 9-D IMU