
阅读本文不需要任何图形学基础,这里抛砖引玉,希望勾起读者对光线追踪的兴趣。

前言
光线追踪原理简单,并且可以抛开图形学的一堆理论,单独提出来讲。
本文不需要任何图形学基础,看完本文后,将能够实现以下效果。
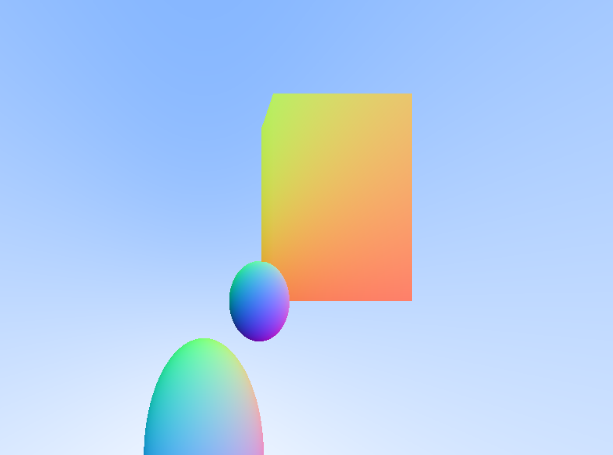
图1 光线追踪效果

原理
光线追踪算法由Appel在1968年提出,是一种基于真实光线传播模拟的计算机三维图形渲染算法。能实现较真实的光影效果。但是由于其庞大的计算量,一般用于离线渲染中。随着硬件技术的提升,已经推出支持实时光线追踪渲染的GPU,如微软DXR和NVIDIA RTX。
光线追踪可简单分为正向光线追踪和反向光线追踪。正向光线追踪算法从光源位置跟踪光子穿过场景的路径。反向光线追踪则从从观察者视角出发向场景发出光线,追踪光线的路径。
正向光线追踪中,由于从光源发出的粒子照射在物体上,折射光线不一定进入观察者视野,会产生大量无效计算。真正被接受使用的是反向光线追踪。
反向光线追踪如图2,假设屏幕内是真实的3D世界,显示器是个透明的玻璃。从相机,也就是视点出发,发射一条光线透过屏幕,射向3D场景中,击中球体,再追踪该光线击中球体后的反射、折射、吸收映射等等,最终综合计算出的结果,即为显示在屏幕上该点的像素(颜色)值。
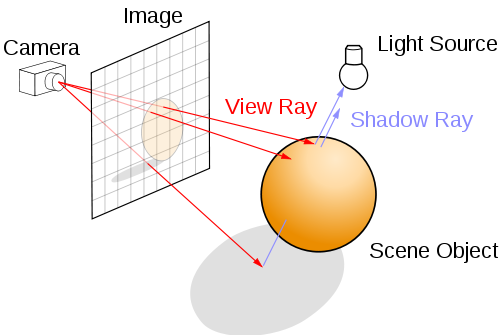
图2 反向光线追踪原理

实现
从基础篇原理可以看出,光线追踪算法是一个物理和数学模拟的过程。
最基础的模块包括:
光线与物体的相交计算
光照效果计算
此外,一些辅助模块:
场景搭建
图形显示
1.光线
首先介绍最难的也是最核心的光线与相交检测。
光线定义为从某一原点o,某一方向d,延申出的一条直线。可以得出光线方程:
p = o + t d (1)
t = 0 表示光线的原点,t可位于无限区间内,表示光线无限延申。
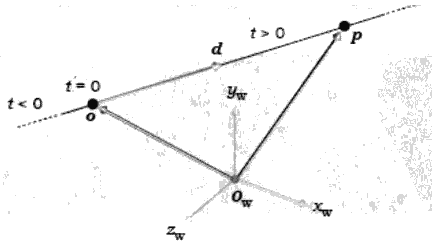
图3 光线[3]
代码如下
class ray
{
public:
ray() {}
ray(const vec3& a, const vec3& b) { A = a; B = b; }
vec3 origin() const { return A; }
vec3 direction() const { return B; }
vec3 point_at_parameter(float t) const { return A + t * B; } // 光线
vec3 A; // 原点
vec3 B; // 方向
};
2. 相交检测
光线与场景中几何体的相交检测,可以看成在一个3维空间,一条直线与一个三维几何体是否相交的问题。
三维几何体表面函数定义为:
f(x, y, z)= 0
f表示关于x, y, z的任意函数。f(x, y, z) < 0 表示表面的一侧, f(x, y, z) > 0,表示表面的另一侧。
过原点的半径为1的球体的方程为:
x ^2 + y ^ 2 + z ^ 2 - 1 = 0
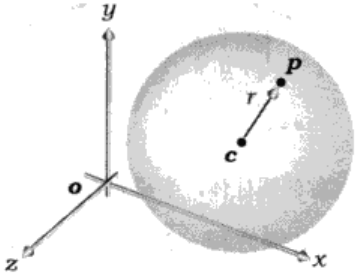
图4 球体[3]
用 p 表示点(x, y, z),为球面上的点, c表示球心坐标, r表示球体半径。
将球体方程改成向量形式为:
(p - c) * ( p - c) - r ^ 2 = 0 (2)
光线与几何体相交
将光线方程(1) 代入球体方程(2),得
(o + t * d - c ) - ( o + t * d - c) - r ^ 2 = 0
可得到关于 t 的二次方程

二次方程的求解,初中数学学过的公式:
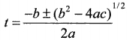
二次方程分别包含一个解、两个解和无解。取决于判别式

对应的实际情况为光线将分别与球体相交一次、两次或者不相交。
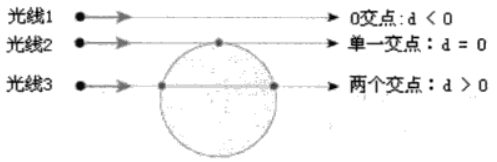
图5 光线-球体相交检测
实现代码如下
bool sphere::hit(const ray& r, float t_min, float t_max, hit_record& rec) const {
vec3 oc = r.origin() - center;
float a = dot(r.direction(), r.direction());
float b = dot(oc, r.direction());
float c = dot(oc, oc) - radius * radius;
float discriminant = b * b - a * c; // b ^2 - a c
if (discriminant > 0) {
float temp = (-b - sqrt(discriminant)) / a;
if (temp < t_max && temp > t_min) {
rec.t = temp;
rec.p = r.point_at_parameter(rec.t);
rec.normal = (rec.p - center) / radius;
return true;
}
temp = (-b + sqrt(discriminant)) / a;
if (temp < t_max && temp > t_min) {
rec.t = temp;
rec.p = r.point_at_parameter(rec.t);
rec.normal = (rec.p - center) / radius;
return true;
}
}
return false;
}
此外,本文实现了光线与包围盒的碰撞检测,使用了slab检测算法,如下。
// slab法碰撞检测
bool AABB::hit(const ray& r, float t_min, float t_max, hit_record& rec) const {
//vec3 min_pos; // AABB最小点坐标
//vec3 max_pos; // AABB最大点坐标
float delta = 0.0001;
if ((abs(r.B.x()) < delta) &&
( r.A.x() > min_pos.x() || r.A.x() < max_pos.x()))
return false;
if ((abs(r.B.y()) < delta) &&
(r.A.y() > min_pos.y() || r.A.y() < max_pos.y()))
return false;
if ((abs(r.B.z()) < delta) &&
(r.A.z() > min_pos.z() || r.A.z() < max_pos.z()))
return false;
float tx_1 = (min_pos.x() - r.A.x()) / r.B.x(); // A 原点, B方向
float tx_2 = (max_pos.x() - r.A.x()) / r.B.x();
if (tx_1 > tx_2)
std::swap(tx_1, tx_2);
float ty_1 = (min_pos.y() - r.A.y()) / r.B.y();
float ty_2 = (max_pos.y() - r.A.y()) / r.B.y();
if (ty_1 > ty_2)
std::swap(ty_1, ty_2);
float tz_1 = (min_pos.z() - r.A.z()) / r.B.z();
float tz_2 = (max_pos.z() - r.A.z()) / r.B.z();
if (tz_1 > tz_2)
std::swap(tz_1, tz_2);
float t_min_max, t_max_min;
t_min_max = std::max(tx_1, std::max(ty_1, tz_1)); // 三个小的交点中的最大,光线进入平面处(最靠近的平面)的最大t值
t_max_min = std::min(tx_2, std::min(ty_2, tz_2)); // 三个大的交点中的最小,光线离开平面处(最远离的平面)的最小t值
if (t_min_max > t_min && t_max_min < t_max && t_min_max < t_max_min) // 范围检测
{
// 碰撞点的信息
float t = t_min_max;
rec.t = t;
rec.p = r.point_at_parameter(rec.t);
vec3 normal = rec.p;
normal.make_unit_vector();
rec.normal = normal;
return true;
}
return false;
}
3.光照效果计算
光照效果,即光线击中物体时,击中点的颜色信息。常见的算法包括PBR、Phong、Blinn-Phong等。需要引入光源、物体材质,本文化繁为简,直接使用击中点的法线坐标做位颜色信息。
代码如下
rec.t = temp;
rec.p = r.point_at_parameter(rec.t);
//球体的法线即为球心指向碰撞点的方向向量。
rec.normal = (rec.p - center) / radius;
4.图形显示
图形显示这一块,最初思考用OpenGL和DirectX,觉得太麻烦想用OpenCV,最后发现,[1]这个教程中使用了ppm格式的图片(ImageMagick打开),简单方便,就拿来用了。本文的工程代码也修改自这本书。
ppm。ppm图片的数据由文件头和数据块组成。如下
P3
200 100
255
0 253 51
1 253 51
2 253 51
3 253 51
文件头包含三行文本
第一行P3,表示PPM文件类型
第二行为图像的宽度和高度,200 x 100的图片
第三行为最大的相素值255
第四行开始为数据块,每行代表一个rgb颜色值。
左上角是原点,写入顺序是从上到下,从左到右。代码如下
int main() {
int nx = 200;
int ny = 100;
std::cout << "P3\n" << nx << " " << ny << "\n255\n";
for (int j = ny-1; j >= 0; j--) {
for (int i = 0; i < nx; i++) {
float r = float(i) / float(nx);
float g = float(j) / float(ny);
float b = 0.2;
int ir = int(255.99*r);
int ig = int(255.99*g);
int ib = int(255.99*b);
std::cout << ir << " " << ig << " " << ib << "\n";
}
}
}
这里cout将数据输出到控制台窗口,怎么变成ppm呢?
两种方法
1. 在工程属性界面,配置调试的命名参数如图
这么做的意思就是将控制台显示的内容重定向到image1.ppm文件
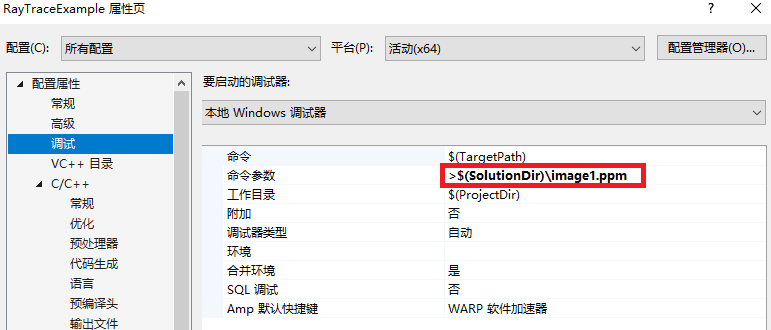
图6 visual studio工程设置
2. 编译工程生成exe文件
然后在exe的目录下,用cmd输入如下命令

图7 重定向输出
5.场景搭建
场景搭建即创建场景中包含的各个物体。
在一般的模型生成中,流行的做法是基于三角形绘制。所有的模型,人、车、建筑等等,都是很多个三角形做出。经典的射线检测即检测射线是否击中某个三角形。(感兴趣的读者可以自己三维中实现射线和三角形的碰撞检测)。
本文使用最基本的数学做法,一个球只需要知道球心和半径,一个AABB包围盒只需要知道最大点和最小点坐标。
球体代码
class sphere : public hitable {
public:
sphere() {}
sphere(vec3 cen, float r) : center(cen), radius(r) {};
virtual bool hit(const ray& r, float tmin, float tmax, hit_record& rec) const;
vec3 center; // 球心
float radius; // 半径
};
包围盒代码
class AABB : public hitable {
public:
AABB() {}
AABB(vec3 min_pos, vec3 max_pos) : min_pos(min_pos), max_pos(max_pos) {};
virtual bool hit(const ray& r, float tmin, float tmax, hit_record& rec) const;
vec3 min_pos; // 最小点
vec3 max_pos; // 最大点
};
需要记录下整个场景的所有物体的信息,方便每条射线击中检测。
hitable* list[3];
list[0] = new sphere(vec3(1, 0, -1), 0.5);
list[1] = new sphere(vec3(0, -1.5, -1), 1);
list[2] = new AABB(vec3(1.0, 0.0, -0.5), vec3(3.0, 2.0, -0.8));
// 场景中物体信息,这里只有两个球体、一个正方体
hitable* world = new hitable_list(list,3 );
最后,对于每个像素生成一条射线和一个方向,遍历场景,进行碰撞检测,输出碰撞点颜色。
for (int j = ny - 1; j >= 0; j--) {
for (int i = 0; i < nx; i++) {
float u = float(i) / float(nx); // 当前像素点的UV坐标
float v = float(j) / float(ny);
vec3 direction(lower_left_corner + u * horizontal + v * vertical); //射线方向
ray r(origin, direction);
vec3 col = color(r, world); // 射线检测
int ir = int(255.99 * col[0]);
int ig = int(255.99 * col[1]);
int ib = int(255.99 * col[2]);
std::cout << ir << " " << ig << " " << ib << "\n";
}
}
工程源码放在个人github,感兴趣的可以自行下载。
链接:https://github.com/youxijunwuchen/RayTraceExample

光线追踪渲染管线介绍
光线追踪渲染和光栅化渲染是相对的两个概念,现代的游戏引擎的渲染模块都是基于光栅化渲染搭建,常说的渲染管线,指的是光栅化渲染管线。
在光栅化渲染渲染中,渲染是以物体为单位渲染。在光线追踪中,渲染以光线为单位。
本文的案例为阐述基本原理,一个点只生成一条光线,往一个方向射出,击中物体结束。
真正的光线追踪会在一个点往多个方向(一般以半球区域)射出多条光线,对于每一条光线,递归追踪其折射、反射,一直追踪至击中光源,或者返回出发点。如图8。
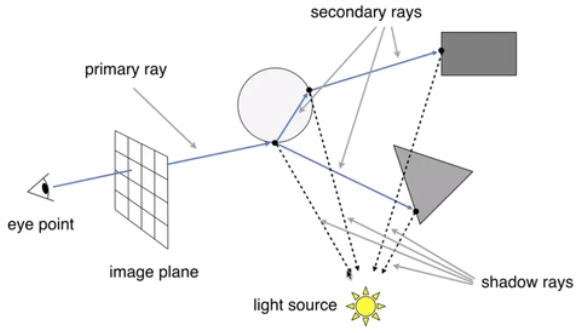
图8 递归光线追踪[2]
计算视点光照的时候,将每条光线,每个路径上的光照贡献叠加。
光线追踪渲染管线如图
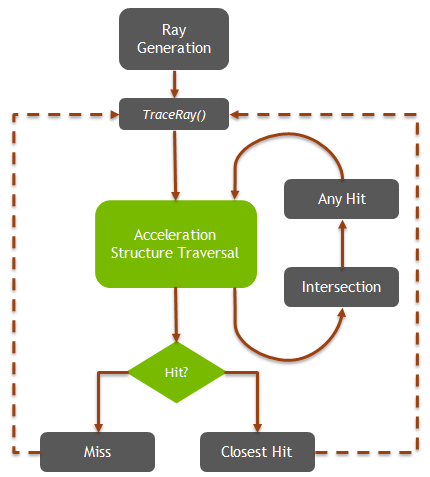
图9 管线追踪渲染管线[4]
光线追踪的渲染程序从Ray Generation的Shader开始,随后开始遍历整个场景求交点,也就是工程中的for遍历world的过程。
当然,工程中都是在CPU中进行,光线追踪管线则在GPU中进行,即Intersection Shader中。
随后,进行有效性检测,图中的Any Hit中进行。由Any Hit Shader处理。
若没有击中任何物体,则调用MISS shader。进入下一条光线检测。
否则,当前光线与整个场景没有新的交点后,调用Closest Hit Shader进行着色。

总结
本文介绍了光线追踪的基本概念,这里屏蔽了对光照的处理,相信读完本文对光线渲染会有个基础的了解。对全局光照感兴趣的读者可以去读经典书籍,如《Real-Time Rendering》、《全局光照技术》。对光线追踪感兴趣的可以阅读本文参考文献中的资料。
光线追踪技术一般用于离线渲染,烘焙生成光照贴图等。随着GPU的提升,2018年,NVIDIA突出第一款支持光线追踪实时渲染的GPU,也宣告光线追踪新的时代来临。
之前买的GTX 3060的显卡支持该技术,改天深入研究下实际应用效果~
参考资料
[1] RayTracing InOneWeekend https://github.com/RayTracing/InOneWeekend
[2] GAMES101,闫令琪, 现代计算机图形学入门 https://sites.cs.ucsb.edu/~lingqi/teaching/games101.html
[3] 光线追踪算法技术 清华大学出版社
[4] 光线追踪与实时渲染的未来 https://zhuanlan.zhihu.com/p/34851503