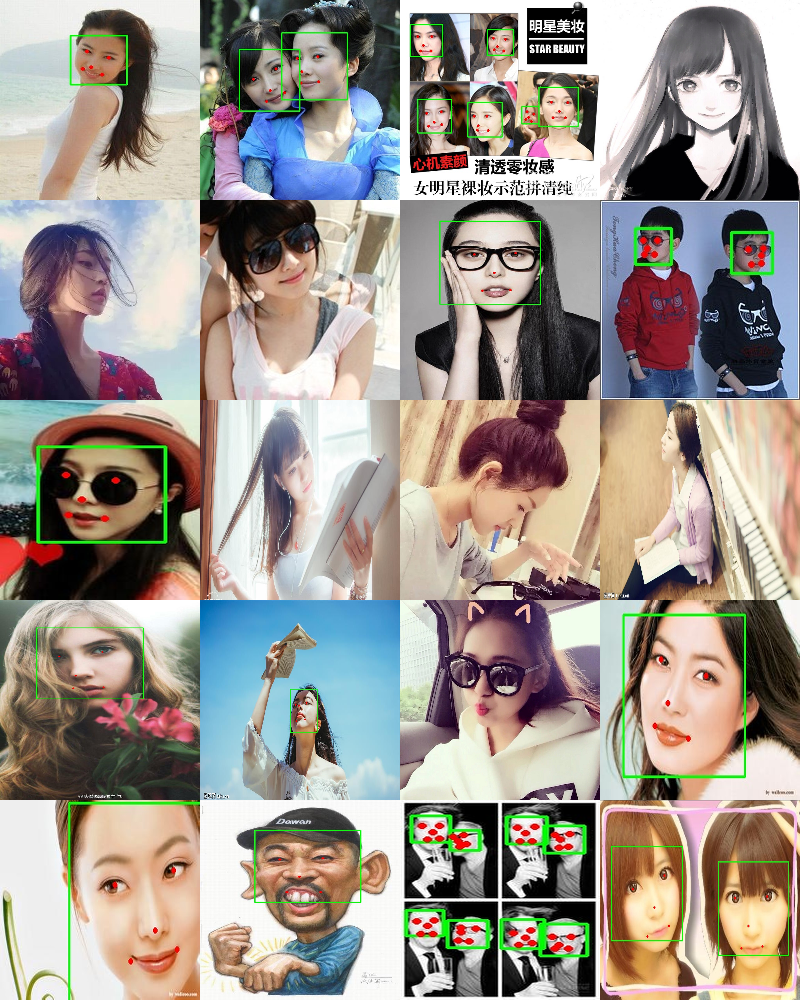
人脸识别引擎SeetaFaceEngine中Alignment模块用于检测人脸关键点,包括5个点,两个眼的中心、鼻尖、两个嘴角,以下是测试代码:
int test_alignment()
{
std::vector<std::string> images{ "1.jpg", "2.jpg", "3.jpg", "4.jpeg", "5.jpeg", "6.jpg", "7.jpg", "8.jpg", "9.jpg", "10.jpg",
"11.jpeg", "12.jpg", "13.jpeg", "14.jpg", "15.jpeg", "16.jpg", "17.jpg", "18.jpg", "19.jpg", "20.jpg" };
std::vector<int> count_faces{ 1, 2, 6, 0, 1, 1, 1, 2, 1, 1,
1, 1, 1, 1, 1, 1, 1, 0, 8, 2 };
const std::string path_images{ "E:/GitCode/Face_Test/testdata/" };
seeta::FaceDetection detector("E:/GitCode/Face_Test/src/SeetaFaceEngine/FaceDetection/model/seeta_fd_frontal_v1.0.bin");
detector.SetMinFaceSize(20);
detector.SetMaxFaceSize(200);
detector.SetScoreThresh(2.f);
detector.SetImagePyramidScaleFactor(0.8f);
detector.SetWindowStep(4, 4);
seeta::FaceAlignment point_detector("E:/GitCode/Face_Test/src/SeetaFaceEngine/FaceAlignment/model/seeta_fa_v1.1.bin");
for (auto name : images) {
fprintf(stderr, "start detect image: %s\n", name.c_str());
cv::Mat src_ = cv::imread(path_images + name, 1);
if (src_.empty()) {
fprintf(stderr, "read image error: %s\n", name.c_str());
continue;
}
cv::Mat src;
cv::cvtColor(src_, src, CV_BGR2GRAY);
seeta::ImageData img_data;
img_data.data = src.data;
img_data.width = src.cols;
img_data.height = src.rows;
img_data.num_channels = 1;
std::vector<seeta::FaceInfo> faces = detector.Detect(img_data);
for (auto face : faces) {
// Detect 5 facial landmarks: two eye centers, nose tip and two mouth corners
seeta::FacialLandmark points[5];
point_detector.PointDetectLandmarks(img_data, face, points);
cv::rectangle(src_, cv::Rect(face.bbox.x, face.bbox.y,
face.bbox.width, face.bbox.height), cv::Scalar(0, 255, 0), 2);
for (auto point : points) {
cv::circle(src_, cv::Point(point.x, point.y), 2, cv::Scalar(0, 0, 255), 2);
}
}
std::string save_result = path_images + "_" + name;
cv::imwrite(save_result, src_);
}
int width = 200;
int height = 200;
cv::Mat dst(height * 5, width * 4, CV_8UC3);
for (int i = 0; i < images.size(); i++) {
std::string input_image = path_images + "_" + images[i];
cv::Mat src = cv::imread(input_image, 1);
if (src.empty()) {
fprintf(stderr, "read image error: %s\n", images[i].c_str());
return -1;
}
cv::resize(src, src, cv::Size(width, height), 0, 0, 4);
int x = (i * width) % (width * 4);
int y = (i / 4) * height;
cv::Mat part = dst(cv::Rect(x, y, width, height));
src.copyTo(part);
}
std::string output_image = path_images + "result.png";
cv::imwrite(output_image, dst);
return 0;
}
从网上找了20张图像,用于测试此模块,测试结果如下:
GitHub:https://github.com/fengbingchun/Face_Test