目录
第一部分、设备通信图
第二部分、设备接线
HX711与传感器的接线
HX711与MCU的接线
第三部分、驱动代码
HX711引脚初始化(Dout,CLK)
HX711读取数据函数
HX711获取传感器的值
头文件定义:
实验结果:
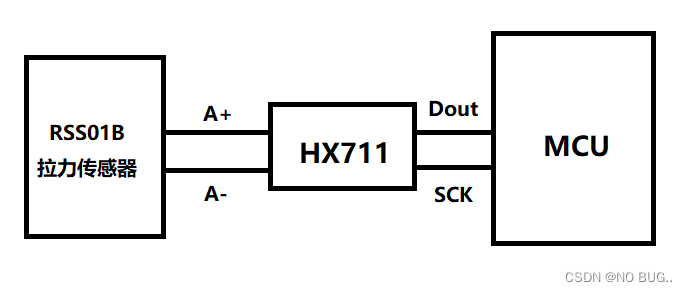
第一部分、设备通信图
物联网节点设备分为三部分:MCU(STM32),医疗传感器(RSS01B拉压力传感器),HX711(24AD)
HX711负责将传感器的电压值转换为数字量发送给MCU,MCU对数据进行处理分析
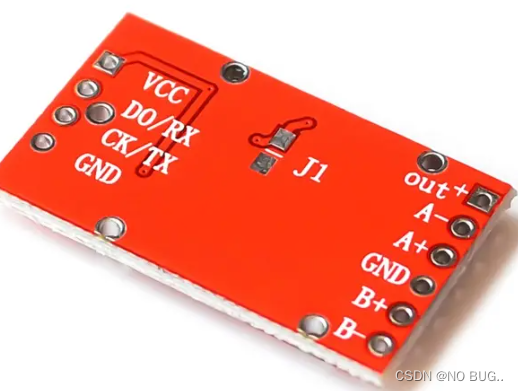
HX711模块图
RSS01B模块图

第二部分、设备接线
HX711与传感器的接线

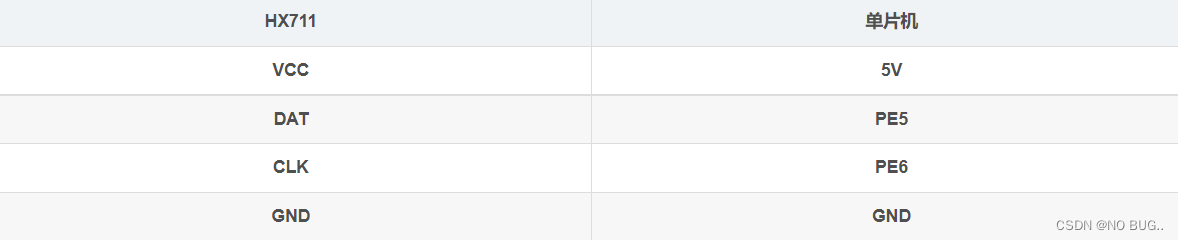
HX711与MCU的接线
第三部分、驱动代码
HX711引脚初始化(Dout,CLK)
void hx711_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOE, GPIO_PIN_5, GPIO_PIN_RESET);
/*Configure GPIO pin : PE5 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
/*Configure GPIO pin : PE6 */
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
}
HX711读取数据函数
unsigned long HX711_Read_01()
{
unsigned long count;
unsigned char i;
HX711_SCK_0;
count=0;
delay_us(1);
while(HAL_GPIO_ReadPin(HX711_DOUT_GPIO,HX711_DOUT) ==GPIO_PIN_SET);
for(i=0;i<24;i++)
{
HX711_SCK_1;
count=count<<1;
delay_us(1);
HX711_SCK_0;
if(HAL_GPIO_ReadPin(HX711_DOUT_GPIO,HX711_DOUT) == GPIO_PIN_SET)
count++;
delay_us(1);
}
HX711_SCK_1;
count=count^0x800000;
delay_us(1);
HX711_SCK_0;
return(count);
}
HX711获取传感器的值
void Get_Maopi_01() //获取标定值(初始化重物重量)
{
Weight_Maopi_01 = HX711_Read_01();
}
float Get_Weight() //获取重物去皮后的重量
{
float Weight_Shiwu = 0;
float Weight_Maopi = 0;
weight.Real_Weight = HX711_Read_01();
printf("weight.Real_Weight£º%f\n",weight.Real_Weight);
if(weight.Real_Weight > Weight_Maopi_01)
{
Weight_Shiwu = weight.Real_Weight;
Weight_Maopi = Weight_Maopi_01;
printf("%f\n",Weight_Maopi);
Weight_Shiwu = Weight_Shiwu - Weight_Maopi;
Weight_Shiwu = (float)(Weight_Shiwu/weight.GapValue);
}
return Weight_Shiwu;
}
头文件定义:
typedef struct
{
float GapValue; //传感器的比例值
float MaoPi; //传感器的初始值(重量的标定值)
float Real_Weight; //传感器的真实值(去皮值)
}Weight;
extern Weight weight;
#define HX711_DOUT_GPIO GPIOE
#define HX711_SCK_GPIO GPIOE
#define HX711_DOUT GPIO_PIN_6
#define HX711_SCK GPIO_PIN_5
//PE6 IO口操作
#define HX711_DOUT_0 HAL_GPIO_WritePin(HX711_DOUT_GPIO,HX711_DOUT,GPIO_PIN_RESET)
#define HX711_DOUT_1 HAL_GPIO_WritePin(HX711_DOUT_GPIO,HX711_DOUT,GPIO_PIN_SET)
//PE5 IO口操作
#define HX711_SCK_0 HAL_GPIO_WritePin(HX711_SCK_GPIO,HX711_SCK,GPIO_PIN_RESET)
#define HX711_SCK_1 HAL_GPIO_WritePin(HX711_SCK_GPIO,HX711_SCK,GPIO_PIN_SET)
实验结果:
