目录
一、分立式BUCK电路总体原理图
二、BUCK电路与LDO的区别
三、BUCK电路为什么要加电感
四、BUCK电路要加续流二极管
五、BUCK电路导通与断开的回路
六、电源公式的中的几个表示方式
1、输入功率用Pin表示
2、输出功率用Po表示
3、电源的效率公式:电源的效率就等于Po/Pin,电源的效率就等于输出功率除以输入功率
4、电感中存储的能量是W=1/2*L*I*I
七、BUCK电路基本电路的几个点位电压
当MOS管导通的时候,A点的电位是310V
当MOS管断开的时候,A点的电位是是-0.7V
八、MOS管在不断开关过程中会导致干扰
九、BUCK电路中的电感是如何工作的
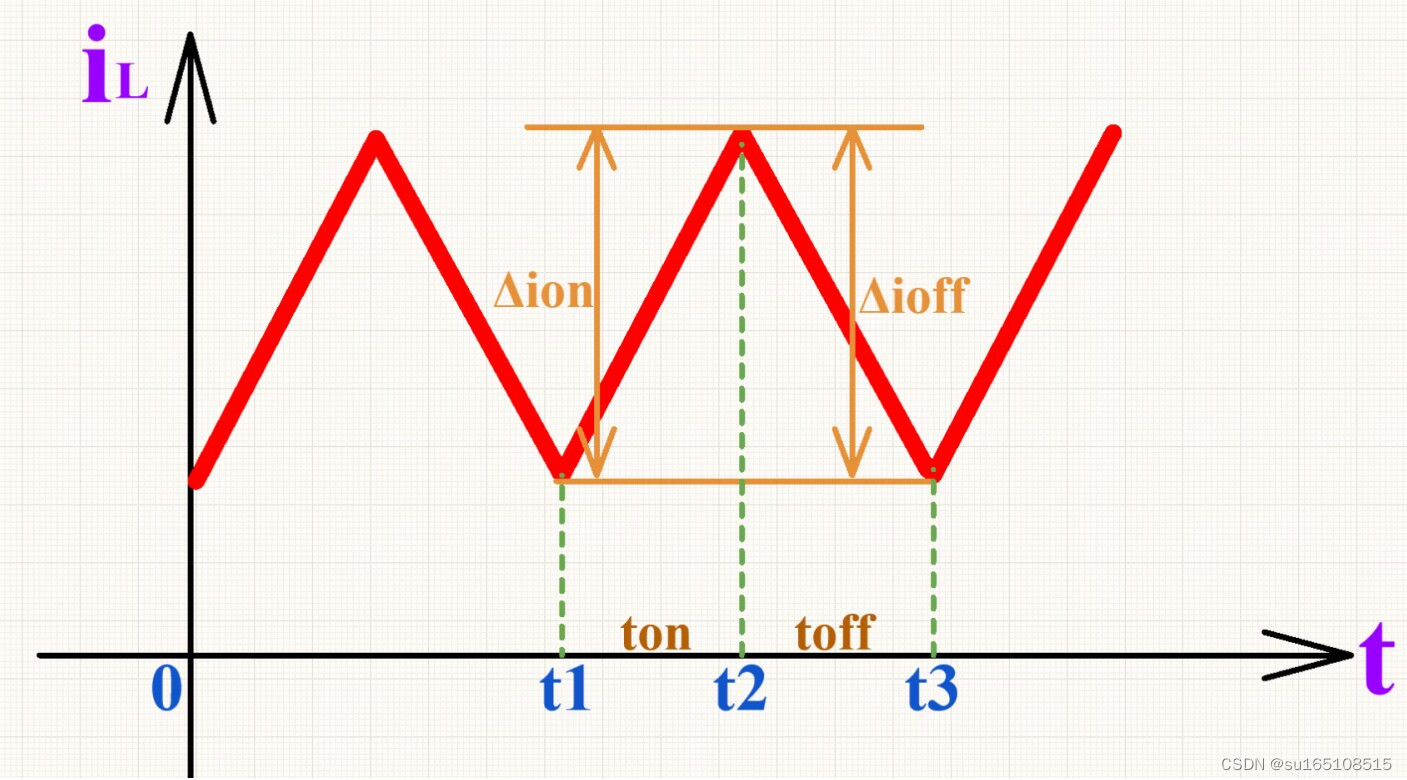
用ton表示MOS管导通的时间段
用toff表示MOS管断开的时间段
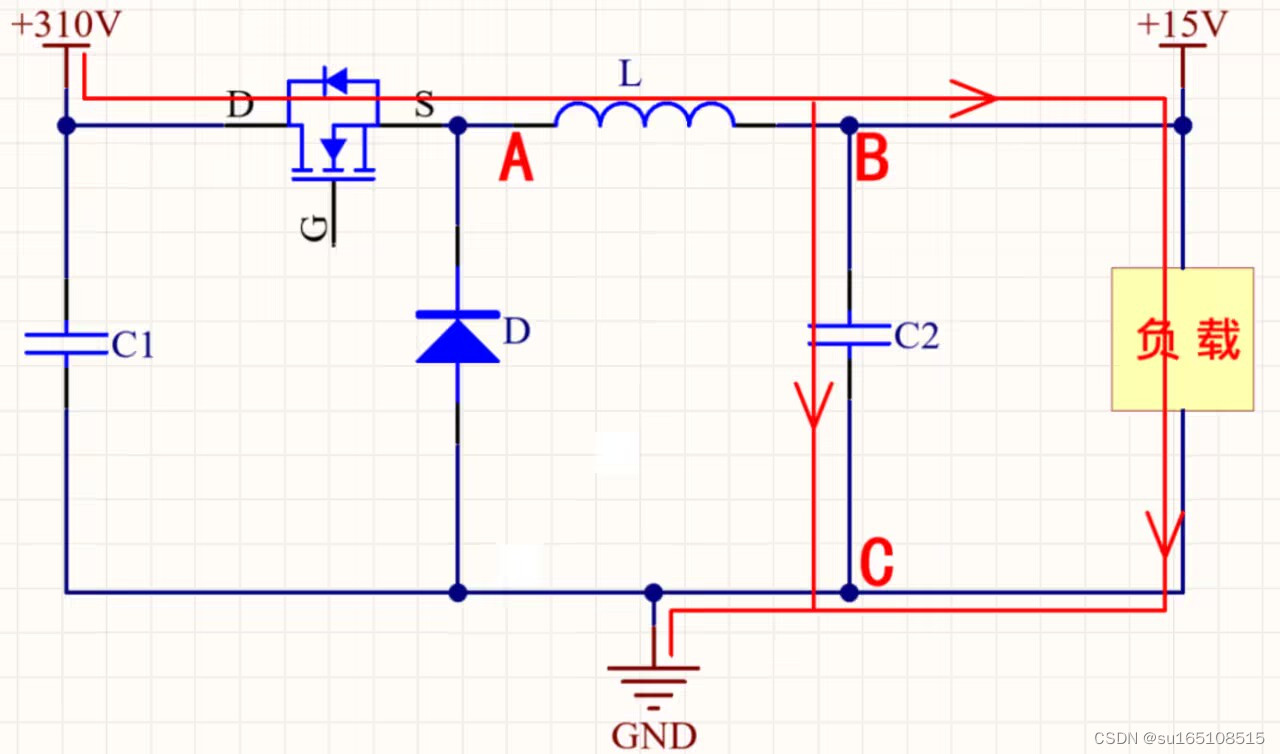
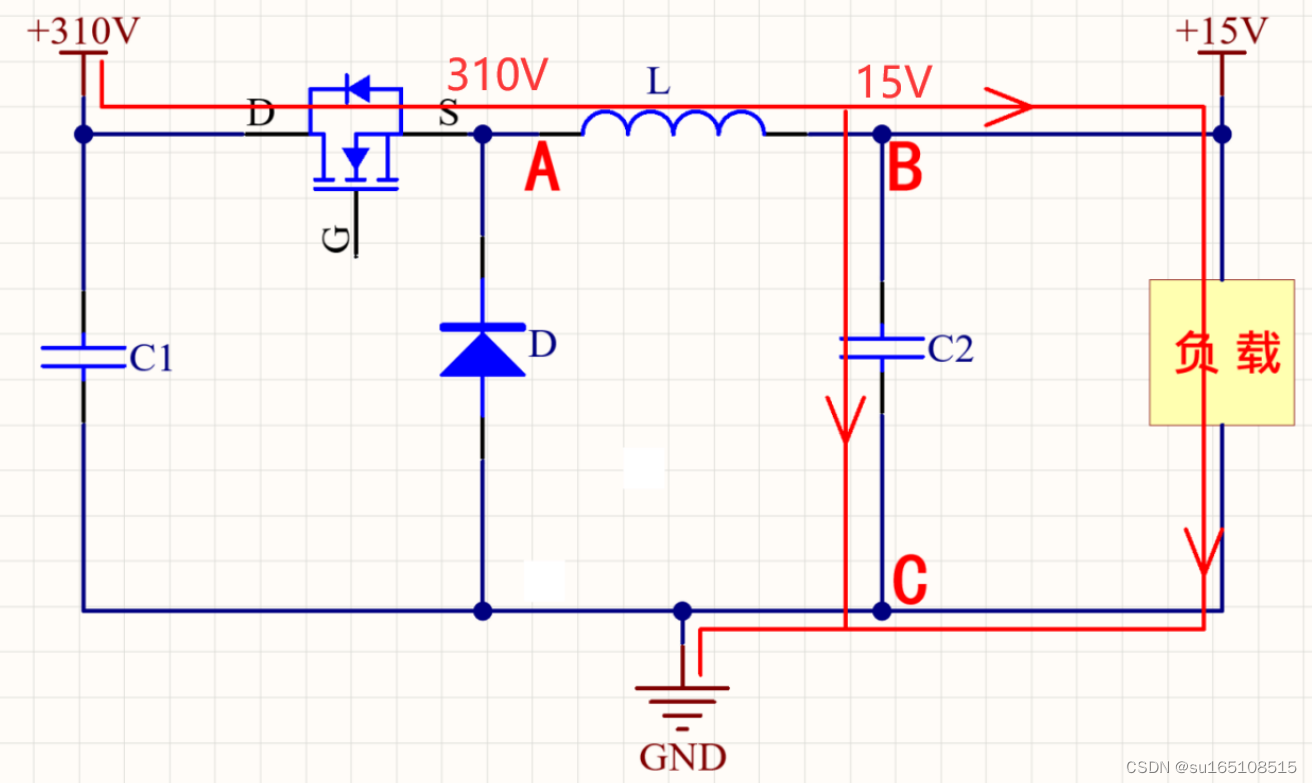
一、分立式BUCK电路总体原理图
下面改图包含了电压环和电流环。

二、BUCK电路与LDO的区别

LDO不适合在压差大的环境下使用,因为三极管因为CE极承受了压差,压差越大损耗的功率就越大,将三极管换成MOS管,MOS管两端的压差很小所以效率很高功耗很小。
三、BUCK电路为什么要加电感
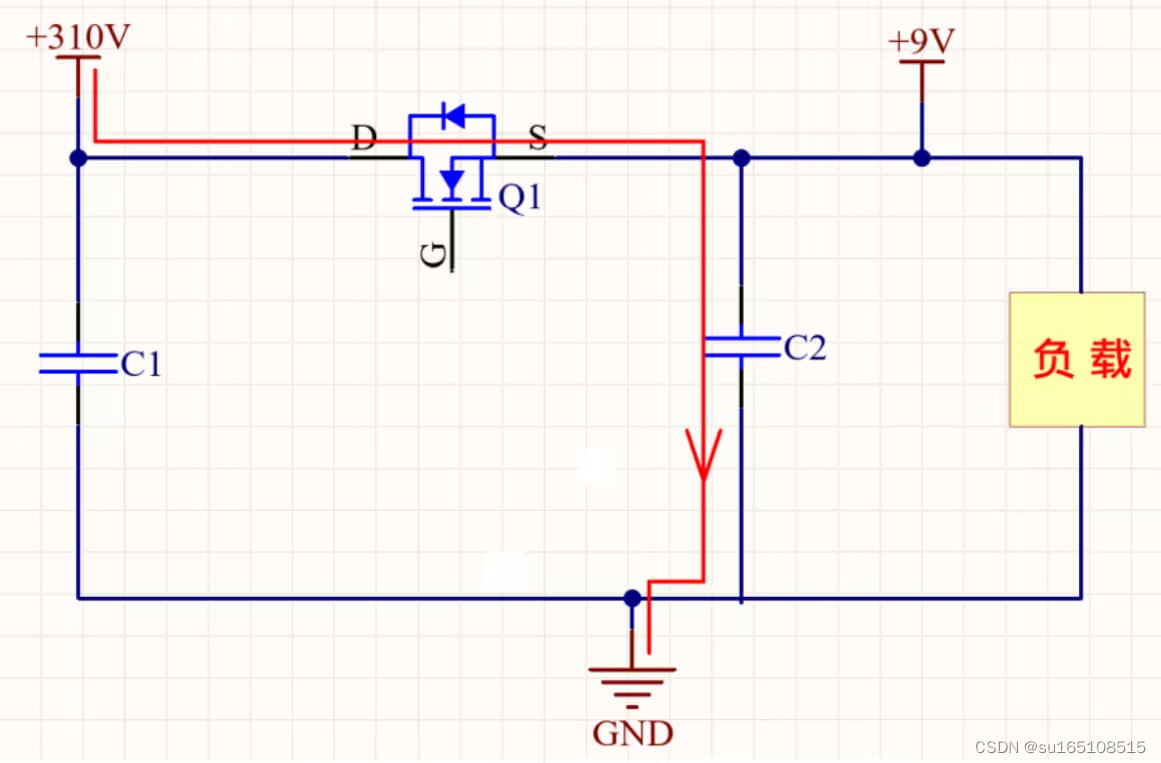
当MOS管闭合以后,310V源通过MOS管给电容C2充电,MOS管导通以后,DS极电阻在毫欧级,电阻很小,那么红线这条充电回路就相当于310V电源直接给电容C2充电,这样的话,是不行的,充电电流就会很大,要限制电流不能很大,如果使用电阻限流也是不行的,串电阻,电阻上会有功耗。
所以采样加电感的方法,加电感使得电流不能突变

四、BUCK电路要加续流二极管
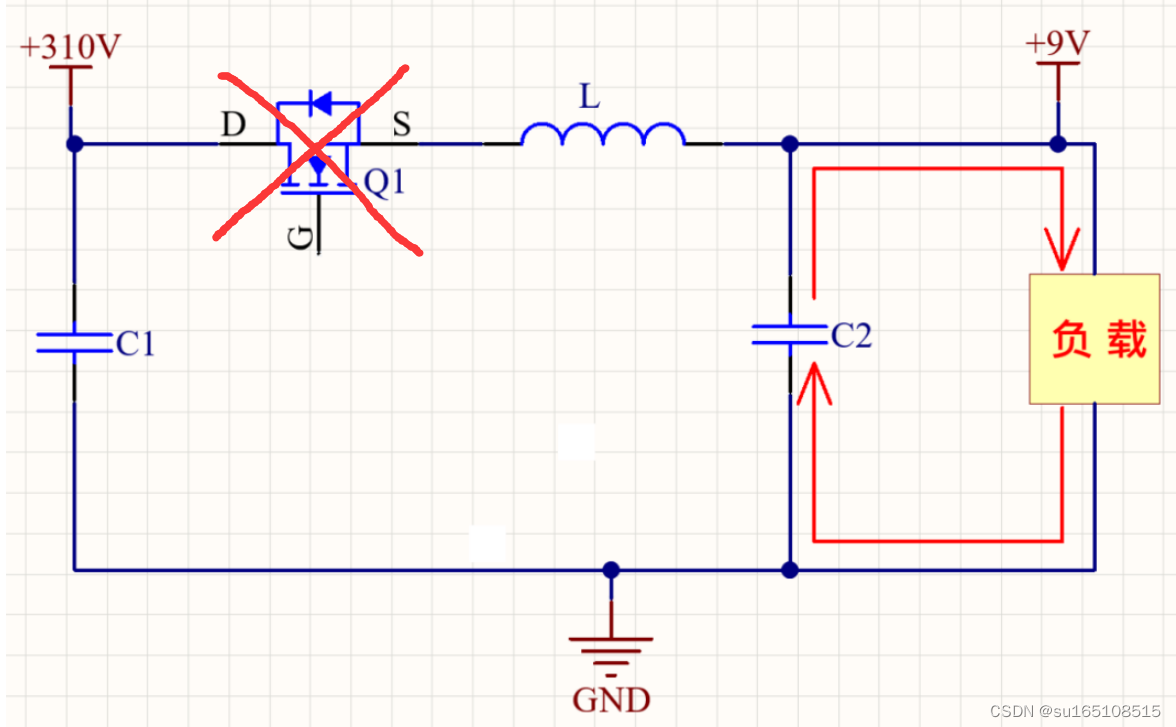
当MOS管导通的时候,310V电源给负载供电,同时给电容C2充电,当电容C2上的电压达到一定程度的时候,我们就要关断MOS管了。
MOS管断开以后,电容C2给负载提供能量,此时电容C2上的电压会下降。
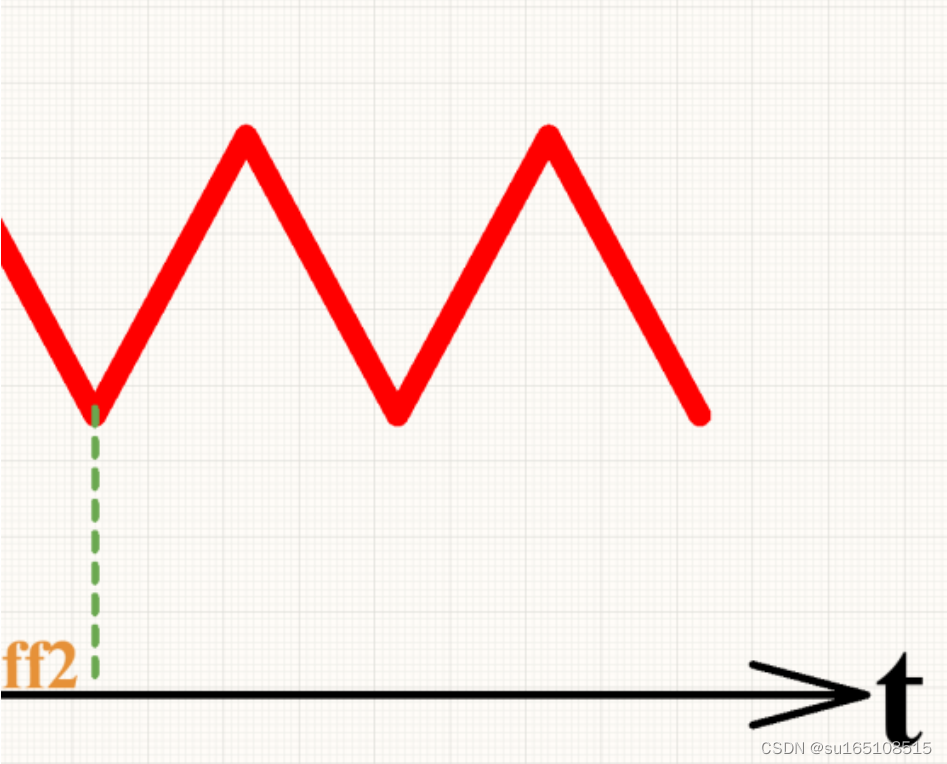
上面的电路有一个问题,电感不能断路,因为电感中的电流不能突变,如果电感电流突变的话,电感两端就会产生感应电动势就会产生一个很高的电压,这个高压会损坏电路中其他器件。
下图就是我之前测试拿掉续流二极管电感两端产生的电压。


我们把二极管加到这个位置的话,就给电感提供了续流回路了。
这个电路结构,就是我们BUCK电路的拓扑结构了。
五、BUCK电路导通与断开的回路

当MOS管导通的时候,310给电感,电容,负载供电,当电容电压达到15V的时候MOS管断开。
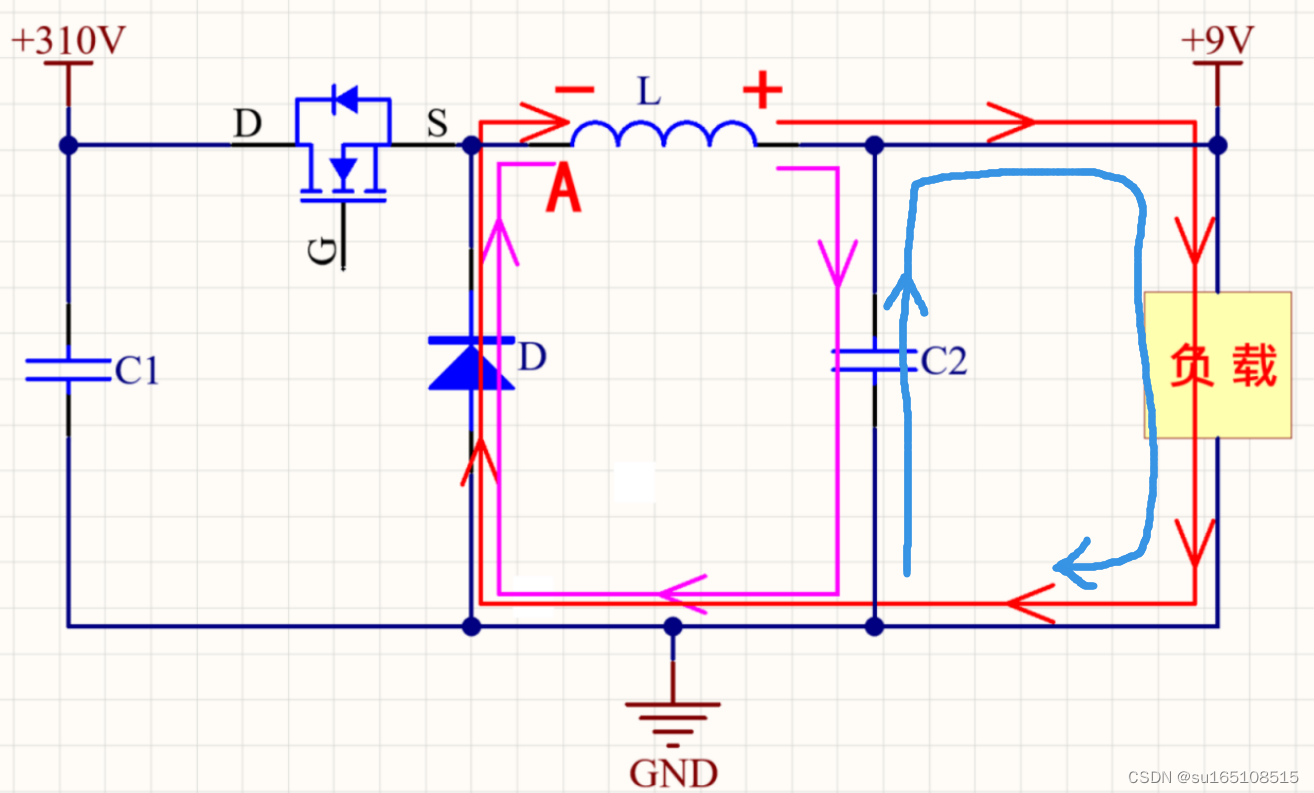
二极管不仅给电感提供了续流回路,而且电感续流的时候还会给负载和输出电容C2供电,如果负载电流很大的话,电容也会给负载供电。
六、电源公式的中的几个表示方式
对于BUCK电路来说,降压是通过电感的能量传递来实现的,电感是承担能量传递工作的,理想电感是不消耗能量的,所以BUCK电源的效率比较高
对于电源来说,有输入功率和输出功率
1、输入功率用Pin表示
2、输出功率用Po表示
3、电源的效率公式:电源的效率就等于Po/Pin,电源的效率就等于输出功率除以输入功率
4、电感中存储的能量是W=1/2*L*I*I
七、BUCK电路基本电路的几个点位电压
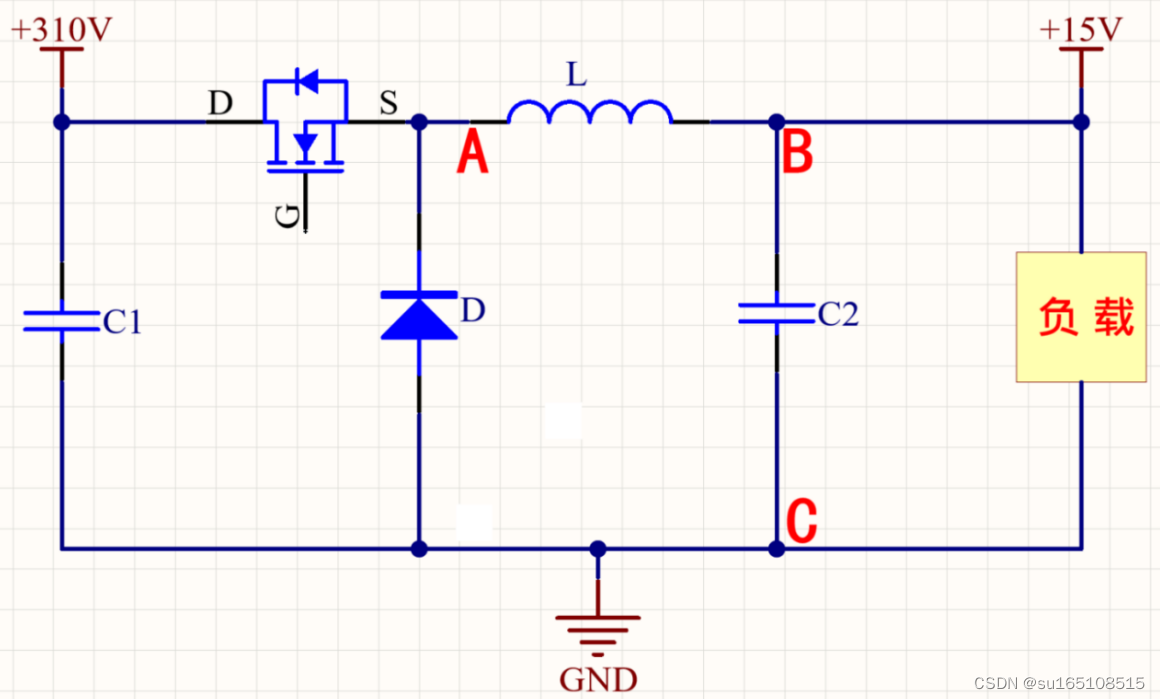
当MOS管导通的时候,A点的电位是310V

当MOS管断开的时候,A点的电位是是-0.7V
对于二极管D来说,它的导通压降是0.7V,而二极管的正端连接的是GND,那么二极管的正端电压是0V,所以二极管的负端电压是-0.7V。
八、MOS管在不断开关过程中会导致干扰
当MOS管在不断开关开关的过程中,A点的电位就会在-0.7V和310V之间来回变化,A点的电位在-0.7V到310V之间来回变化,会导致A点电压在-0.7V到310V之间来回变化,就产生了dv/dt,也就是电压的变化速度极快,而dv/dt就是电路中的干扰源,也就是BUCK电路是存在干扰的。
九、BUCK电路中的电感是如何工作的
电感是BUCK电路中传递能量的器件,电感中存储的能量是W=1/2*L*I*I,也就是说,电感中存储的能量 正比于 电感电流的平方,L表示电感的感量,I是电感中流过的电流,也就是说,当电感中没有电流的时候,电感存储的能量等于0,电感中的电流越大,电感存储的能量也就越大
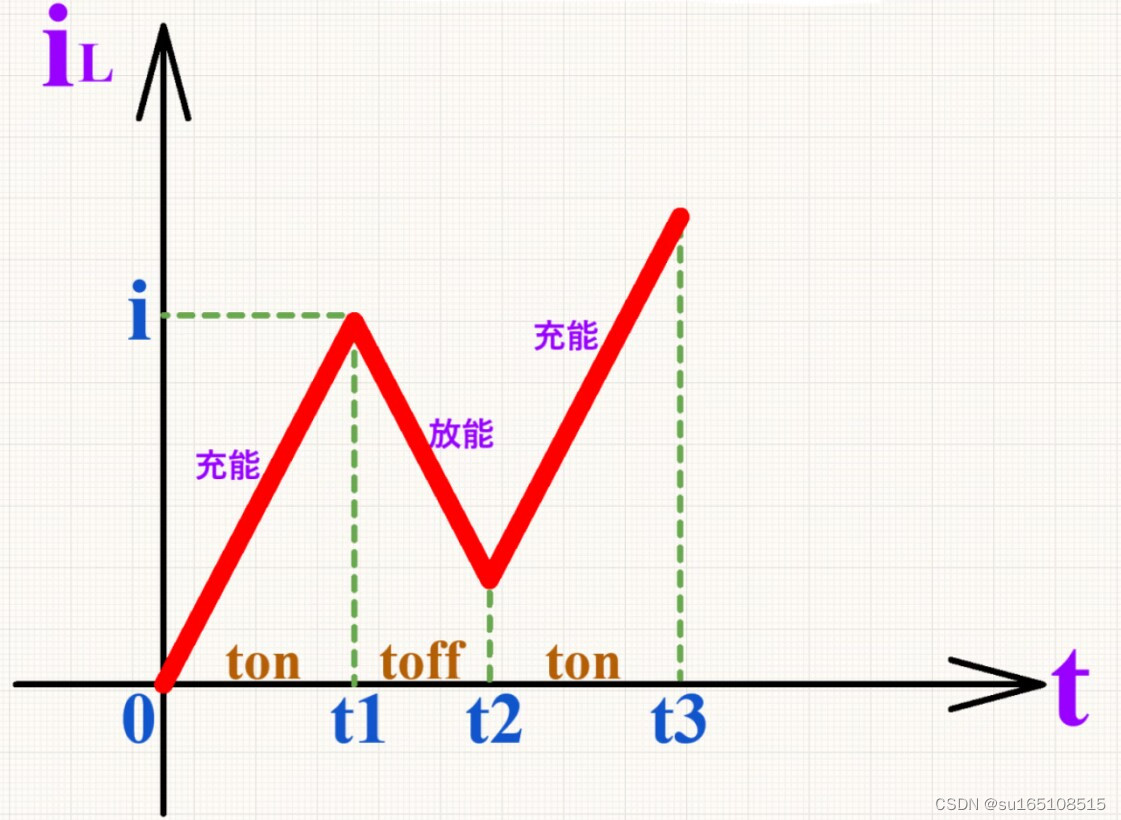
当MOS管导通的时候,310V的电源通过电感给负载供电,同时也给输出电容C2充电,此时电感中流过的电流是慢慢变大的也就是电感中存储的能量慢慢变大。
我们假设电感中的初始电流等于0,也就是电感初始能量等于0,当MOS管导通以后,310V的电源通过电感来给输出电容C2充电,同时给负载供电,此时电感中的电流是从0开始变大的,而且,如果我们假设BUCK的输出电压Uo保持在15V不变,也就是B点电压为15V不变,而A点电压等于310V不变,所以电感两端的压差是不变的,电感两端的电压U=310V-15V=295V。而对于电感来说U=L*di/dt,也就是U=L*di/dt=295V,所以di/dt=U/L=295V/L。得到了一个结论MOS管导通期间,di/dt不变。di/dt就是电流变化速度,也就是电流变化斜率,在MOS管导通期间,电感中的电流变化速度是不变的,电流的大小是变化的,但是电流的变化速度是不变的。

电感电流的曲线应该是一条笔直的直线,如果电流的变化速度不变,那么相同的时间内,电流的增加量不变,所以电流是一条直线

用ton表示MOS管导通的时间段
用toff表示MOS管断开的时间段
假设电感的初始电流等于0,电感中的能量W=1/2*I*I,电感中存储的能量也从0开始慢慢变大

当MOS管断开的时候,假设输出电压Uo=15V保持不变,那么电感两端的电压是不是也保持不变,MOS管断开的时候,电感在续流,A点保持-0.7V,Uo保持15V,所以电感两端的压差保持不变,所以电感中电流的斜率也不变。

在toff期间,电感中的电流减小的曲线也是一条直线,正常来说充电和放电的斜率是不相同的。
在toff期间,电感中的电流减小,所以电感中存储的能量也减小,所以在MOS管断开期间,电感是释放能量的。
在上图中,电感的初始电流为0,在ton期间,电感存储的能量是W = 1/2*L*i*i - 1/2*L*0*0 = 1/2*L*i*i,是t1时刻的能量减去0时刻的能量,
同样的道理,在MOS管断开期间,也就是toff期间,电感中能量的变化量是
W = 1/2*L*0*0 - 1/2*L*i*i = -1/2*L*i*i
MOS管导通期间(也就是ton期间)电感存储起来的能量就等于MOS管断开期间(也就是toff期间)电感释放的能量,MOS管导通的时候,电感存储起来了W能量,MOS管断开的期间内,电感又把这W的能量释放了,所以,BUCK电路中,电感只是起到了能量传递的作用。

也就是说,在MOS管导通的期间内,电感从310V电源拿了W的能量,在MOS管断开的期间,电感又把从310V电源拿的那W的能量全部释放了,这W的能量,电感只是接了一下手,电感并没有产生能量,也没有消耗能量,只是传递了一下能量,上面的情况,就是BUCK电路稳定工作的电感的情况。
上图当电感充的能量大于放的能量的时候,每个周期结束的时候,电感中的能量都要增加,这样的话,电感中能量会越来越大,经过若干个这样的周期以后,电感中的电流就会越来越大,最终超过饱和电流,电感就会饱和了,这样的话,BUCK电路就会出现问题了,所以,我们BUCK电路正常工作的时候,电感在每个周期充的能量和放的能量是相等的。
十、BUCK电路MOS管导通与截止电感两端电压UL计算

当MOS管导通的时候,A点的电位是310V,B点的电位是15V,电感两端的电压U=310V-15V=295V,在MOS管导通的时候,电感两端的电压U=295V不变,而且U=L*di/dt=295V,也就是U=L*di/dt=295V,所以di/dt=U/L=295V/L,di/dt就是电感电流的变化速度,那么,电感制造好以后,它的感量L是不变的,所以,上面的式子说明,当MOS管导通的时候,电感中电流的变化速度di/dt是不变的。
电感电流的增大速度不变,也就是上图红线所示,电感电流的曲线是一条直线。

当MOS管断开,电感两端的压降等于15V-(-0.7V)=15.7V,也就是U=L*di/dt=15.7V,所以di/dt=U/L=15.7V/L,上面的式子说明,当MOS管断开的时候,电感中电流的变化速度di/dt是不变的
所以,当MOS管断开的时候,电感电流的曲线也是一条直线
十一、电感的能量传递作用
在MOS管导通的期间内,电感从310V电源拿了W的能量,在MOS管断开的期间,电感又把从310V电源拿的那W的能量全部释放了,所以,这W的能量,电感只是接了一下手。
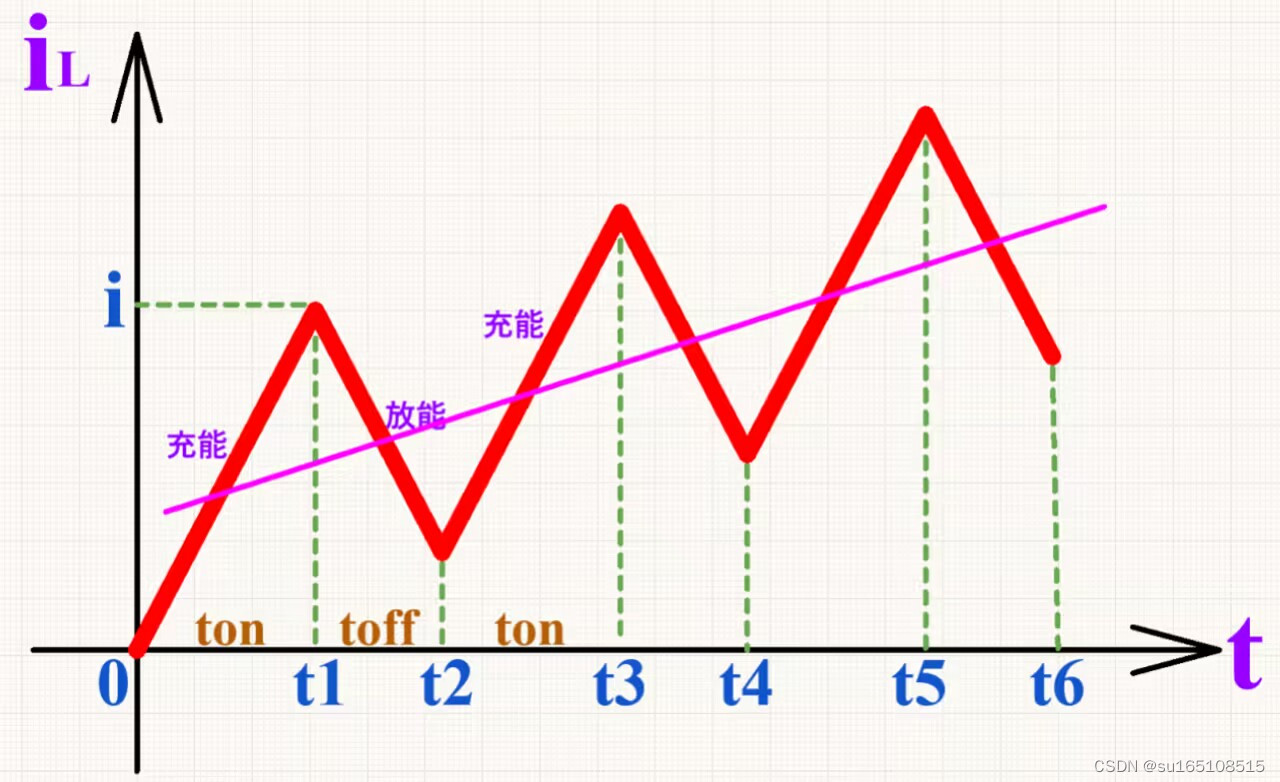
每个周期中,电感电流上升的斜率不变,每个周期中,电感电流下降的斜率不变,因为在MOS管导通和断开期间,电感两端的电压差不变,所以电流变化速度不变,如上图所示,在电感中的能量没有释放完的时候,MOS管就导通了,310V电源又开始给电感充能了,并且每个周期的导通时间和断开时间都相同,电感中的能量是会越来越大,我们假设每个周期中MOS管导通的时间ton都相等,断开的时间toff都相等,那么经过若干个周期以后,电感中的电流会持续上升,每个周期结束时,电感中存储的能量也会持续上升,这样的话,当电感中的电流达到一定程度的时候,电感就会饱和了,电感饱和了以后,电感就相当于一根导线了,失去了抑制电流变化的能力,所以,要想BUCK电路稳定工作的话,是不是ton期间和toff期间,电感中电流的变化量要相等,MOS管导通期间电流的变化量=MOS管断开期间电流的变化量
十二、BUCK电路的几个表达式
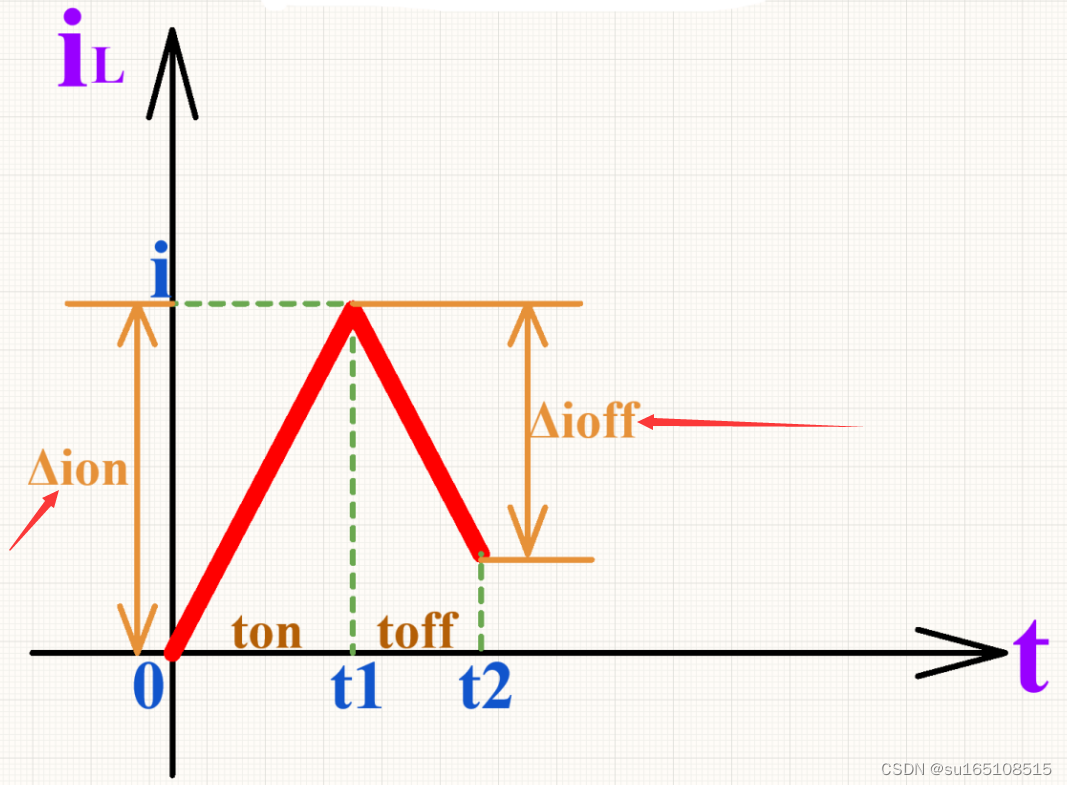
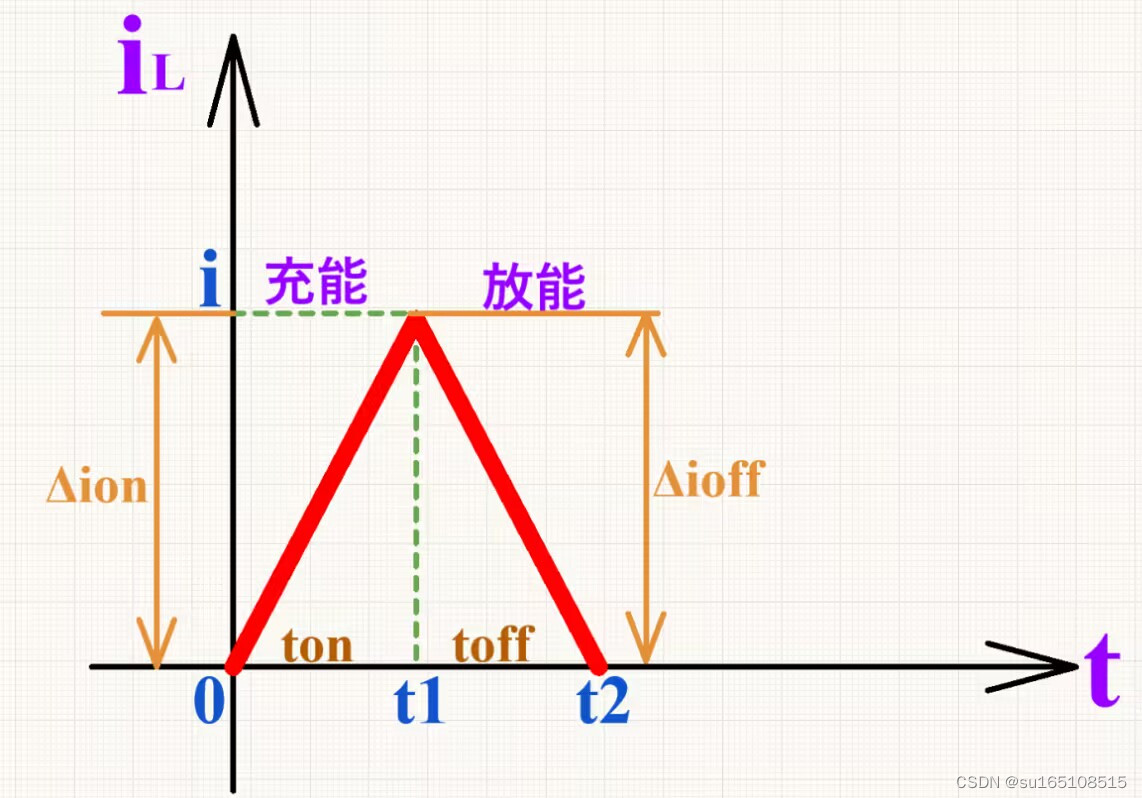
电流的变化量Δi
这里是电流的变化量,如上图红色箭头所示。
MOS管导通期间电流的变化量是Δion
MOS管断开期间电流的变化量是Δioff
上图中,Δion不等于Δioff,这个电路之所以不稳定是因为Δion不等于Δioff
上面这个电路可以稳定

在上面的波形中,当一个周期结束和开始的时刻,电感的电流都恰好变成0
上面的波形,在一个周期内,电感中的平均电流就等于腰线电流,平均电流用Iav来表示,腰线电流用IL来表示
电感中的平均电流就等于腰线电流,平均电流用Iav来表示
腰线电流用IL来表示
上面的波形中,Iav=IL=1/2*ΔI
负载消耗的平均电流用Io来表示
负载消耗的电流Io就等于电感的平均电流Iav,这样BUCK电路就处于稳定状态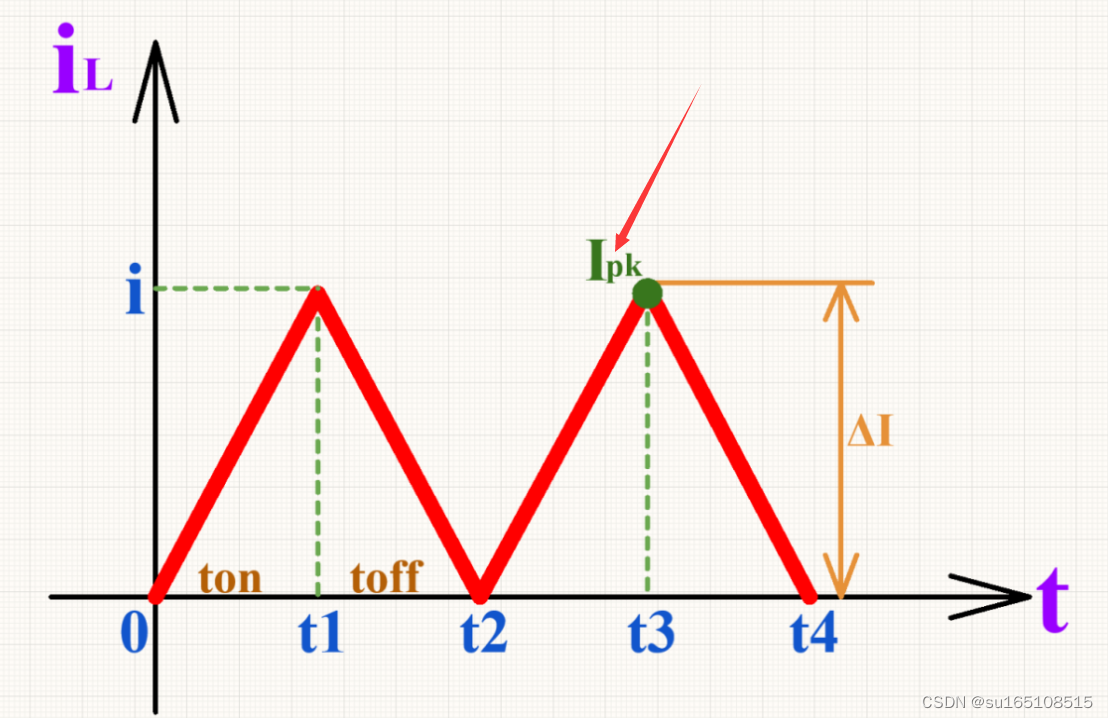
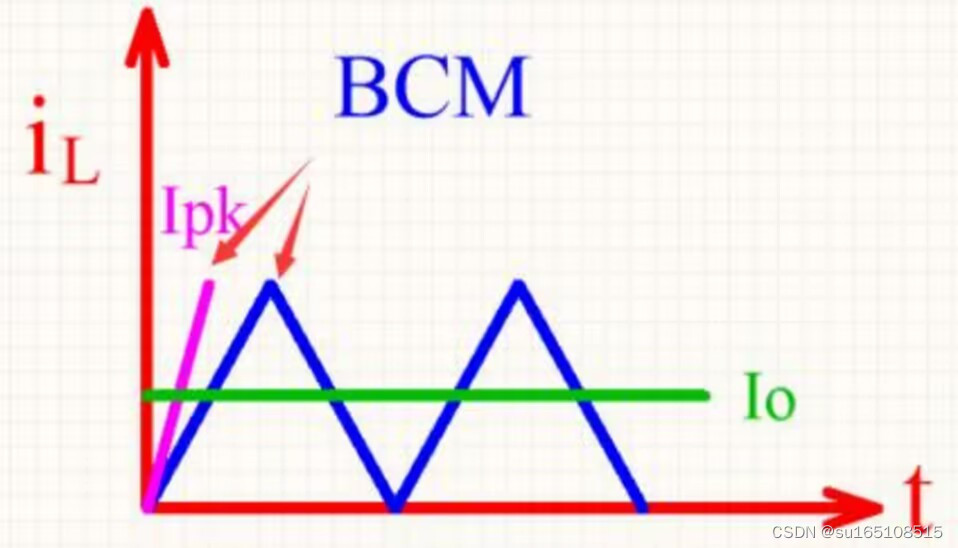
电感中电流的最大值,也就是电流的峰值,用Ipk表示
对于上图的电感电流波形来说,Ipk就等于电流变化量ΔI
电感上的平均电流Iav=1/2*Ipk,对于上图来说,电感中的平均电流就是腰线电流
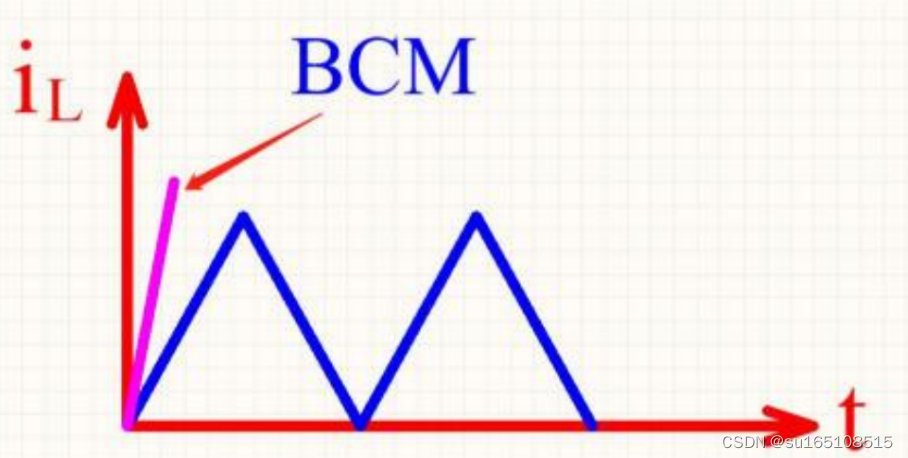
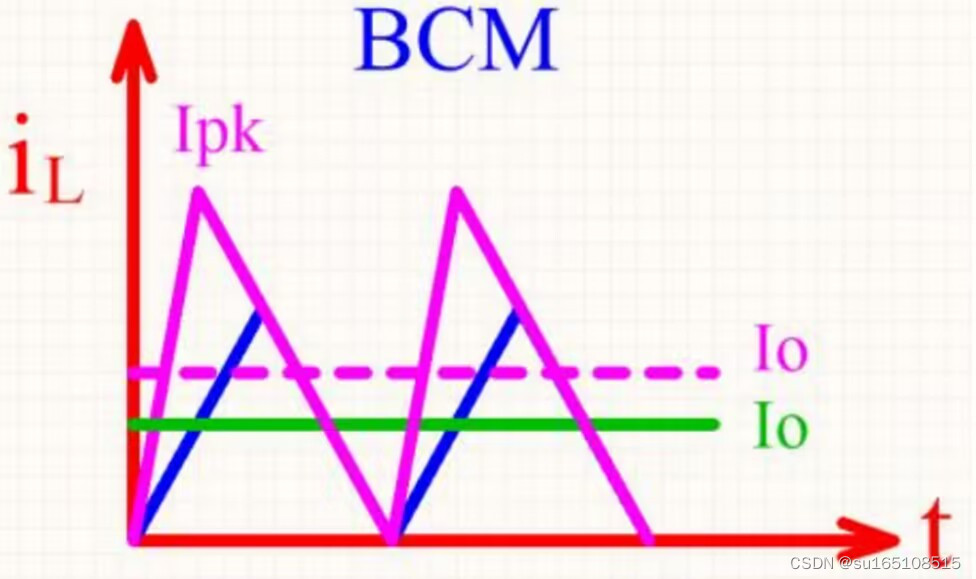
十三、BCM模式 临界连续模式
现在假设BUCK电路处于稳定工作状态
MOS管导通期间电感电流的变化量等于MOS管断开期间电感电流的变化量

我们把上图所示的电感电流波形叫做BCM模式,临界连读模式是电感的工作模式
临界连续模式表示MOS管断开期间,当电感中的电流降为0的时候,MOS管又重新导通了
十四、DCM模式 断续工作模式

在toff期间的t2时刻,电感中的电流降为0的时候,MOS管没有重新导通,t2到t3时间端内电感中的电流为0,在t3时刻,电感才重新导通
这样的电感电流变化规律,称电感工作在DCM模式,也就是断续工作模式
当负载很小的时候,此时电感不需要传递太多的能量,所以toff期间电感上的电流为0,此时电感工作在DCM模式
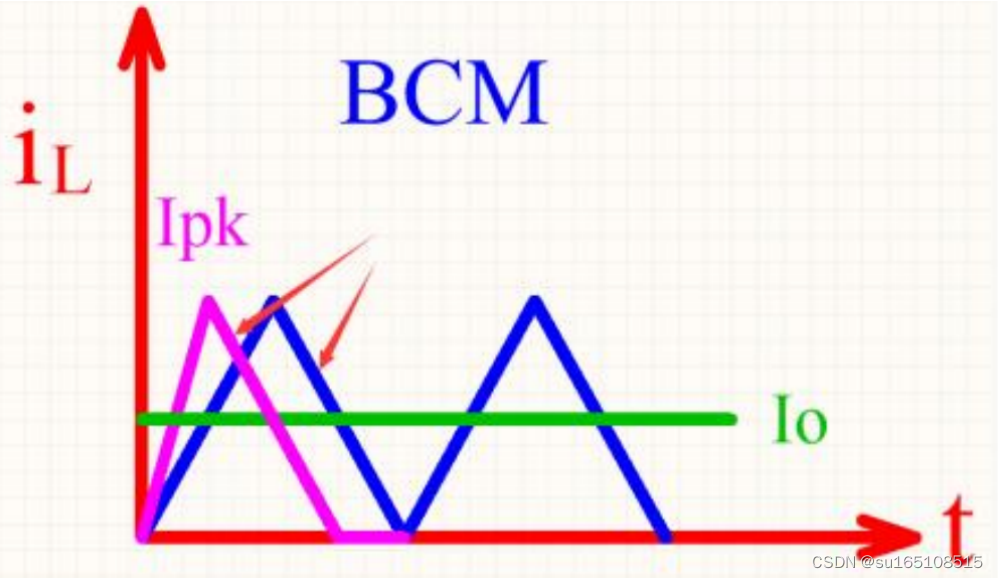
十五、CCM模式 连续模式

如果电感刚开始工作在临界连续模式下,当负载突然变大的时候,电感需要给负载传递更多的能量,所以控制电路会让MOS管导通的时间变长,也就是让电感存储能量的时间变长,而MOS管断开期间,电感电流下降的斜率不变,控制电路控制MOS管的导通和断开时间来调整电感的平均电流,经过若干个调整周期以后,负载需要的平均电流Io和电感提供的平均电流Iav重新相等的时候,BUCK电路会从新达到平衡。
重新平衡以后,电感中的电流就是这样子,电感中的电流不会降到0就重新导通MOS管给电感充能,当负载需要的电流比较大的时候,电感工作在连续模式。
十六、BUCK电路负载恒定不变,电感传递的能量必须等于负载消耗的能量

ton期间的电流增加量为Δion,toff期间的电流减小量为Δioff
蓝色是ton期间电感电流上升曲线,ton期间电感电流增加了Δion
绿色是toff期间电感电流下降曲线,toff期间电感电流下降了Δioff
当负载电流恒定不变的时候,要想BUCK电路稳定,每个周期结束的时候,电感中的电流都相等也就是说,当负载电流恒定不变的时候,要想BUCK电路稳定,ton期间的电流变化量Δion=toff期间的电流变化量Δioff。
只有每个周期内电感电流的增加量等于每个周期内电感电流的减小量,电感中的电流才会保持不变。

对于BCM模式,临界连续模式,电感电流的变化量用Δi来表示,Δion=Δioff=Δi
Ipk是电流的峰值,对于BCM模式来说,Ipk=Δi
对于BCM模式来说,电感电流的平均值Iav=ΔI/2
负载的平均电流Io=电感的平均电流Iav的时候,BUCK电路就稳定了。
对于BCM临界连续模式来说,腰线电流IL=ΔI/2
十七、DCM断续模式分析

我们在上图中画出来了电感的腰线电流,腰线电流IL的大小就是三角形高度的一半
在DCM断续工作模式下,电感的平均电流Iav和腰线电流IL是什么关系?
在DCM断续工作模式下电感的平均电流Iav是小于腰线电流IL的

那对于DCM断续模式来说,负载平均电流Io不变,BUCK电路要想稳定的话,电感的平均电流Iav和Io是什么关系?
在DCM断续工作模式下BUCK电路稳定工作的时候,电感的平均电流Iav等于负载的平均电流Io,也就是Iav=Io
十八、CCM连续模式分析

对于CCM连续模式来说,平均电流Iav和腰线电流IL的关系
腰线电流是三角形的腰线,是Iav=IL,并且电感的平均电流Iav等于负载电流Io的时候,BUCK电路稳定。
十九、三种工作模式对比
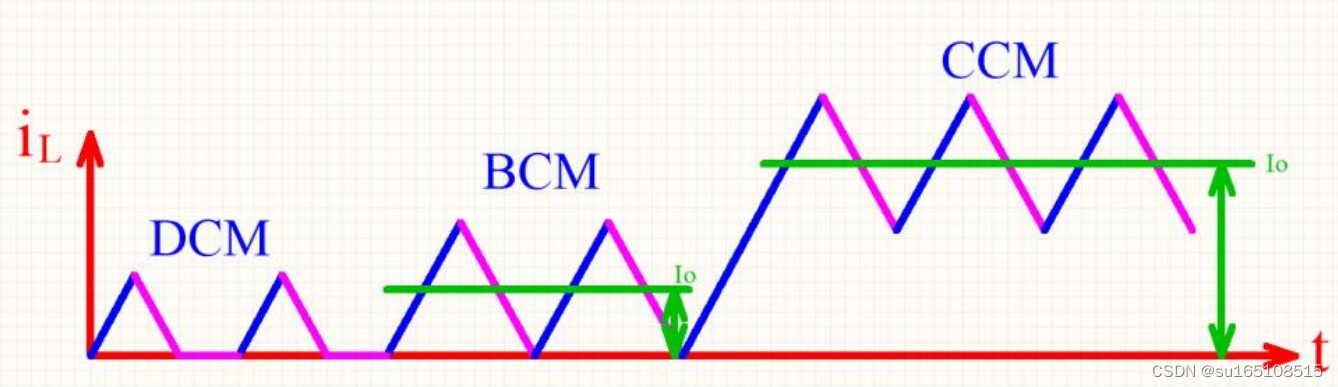
如果把电感的三种工作模式画在一张图片里。
DCM
在DCM断续模式中,负载的大小Io和MOS管的占空比是有关系的,负载Io越大,占空比越大,负载Io越小,占空比越小
DCM断续模式中,当负载Io变大的时候,MOS导通的占空比变大,电感传递的平均电流Iav就增大了。
控制电路增大MOS管占空比的目的是让电感平均电流Iav重新等于负载平均电流Io,以让BUCK输出电压稳定。
当负载电流Io增大模式切换
当负载电流Io大到一定程度以后, 如果Io继续变大,电感由DCM断续模式进入BCM临界连续模式。
进入BCM临界连续模式以后,MOS管的占空比已经达到最大了,负载再变大,占空比也不会再变大了。
负载再次变大的时候,此时电感电流波形会整体上移,目的是提高电感的平均电流Iav,此时电感由BCM临界连续模式进入CCM连续模式。
因为BUCK电路的输入和输出电压确定了以后,电感两端的电压差就不变了,电感的上升电流斜率和下降电流斜率就不变了。
所以,想要增大电感的输出电流,在DCM模式下的方法就是提到MOS管的导通占空比,而到了BCM模式以后,占空比已经最大了,此时只能将电流波形整体向上平移来提高电感的平均电流Iav了
在负载刚刚变大后若干个周期内,MOS管是持续打开的,可以认为占空比是100%,这是瞬态,也就是经过若干个周期的调整以后,BUCK电路重新达到稳定状态

我们看这三种工作模式,不管是哪种工作模式,电感电流的上升斜率和下降斜率都不变。因为BUCK的输入和输出电压确定以后,电感两端压降U就确定了,电流变化速度di/dt = U/L就不变了。
二十、BUCK电路伏秒平衡

MOS管导通的时间是ton,ton时间段内电感两端电压差是Uon,电感电流变化量为ΔIon。
此时,对于电感来说,Uon=L*ΔIon/ton。
同理,对于MOS管断开期间,也就是toff时间段内,Uoff=L*ΔIoff/toff
MOS管断开的时间是toff,toff时间段内电感两端电压差是Uoff,电感电流变化量为ΔIoff
伏秒平衡公式推导
负载不变,BUCK稳定的条件是ΔIon=ΔIoff
把上面两个式子变一下形
Uon=L*ΔIon/ton,得出ΔIon=Uon*ton/L

Uoff=L*ΔIoff/toff,得出ΔIoff=Uoff*toff/L
ΔIon=ΔIoff,也就是ΔIon=Uon*ton/L=ΔIoff=Uoff*toff/L
所以,我们由ΔIon=ΔIoff,推出了Uon*ton=Uoff*toff
上面的公式就是伏秒平衡公式
在稳态情况下,当MOS管打开后,电感两端的压降Uon=310V-15V=295V

当MOS管关断后,电感两端的压降Uoff=Vo+0.7V=15V+0.7V=15.7V
忽略那0.7V的压降,就认为Uoff=Vo.
BUCK电路的输入电压用Vin来表示,输出电压用Vo来表示
那么,Uon = Vin-Vo,Uoff = Vo
刚才由ΔIon=ΔIoff,推出了Uon*ton=Uoff*toff
把Uon = Vin-Vo,Uoff = Vo代入到Uon*ton=Uoff*toff
得到了输入电压Vin和输出电压Vo的关系

上面的这个公式就叫做伏秒平衡公式
伏秒平衡公式本质上描述的是,伏秒平衡公式描述的是ΔIon=ΔIoff这个条件,负载Io不变的时候,BUCK电路稳定的条件是ΔIon=ΔIoff,ΔIon=ΔIoff,并且结合BUCK的拓扑中Vo、Vin、和Uon、Uoff的关系,得出的伏秒平衡公式,BUCK电路稳定的条件是ΔIon=ΔIoff,这是电流之间的描述方式
.BUCK电路稳定的条件是(Vin-Vo)*ton=Vo*toff,这是输入输出电压和导通时间之间的描述方式.
二十一、伏秒平衡再次推导
本质就是在MOS管导通期间,也就是ton期间,电感电流上升的量ΔIon等于在MOS管断开期间(也就是toff期间),电感电流下降的量ΔIoff。也就是说,每个周期开始和结束的时刻,电感中的电流大小是相等的。
也就是在ton的电感电流上升量ΔIon=toff期间电感电流的下降量ΔIoff,用公式表示的话,就是ΔIon=ΔIoff,条件是ton对应的是ΔIon,toff对应的是ΔIoff。那么,对于电感来说,它两端电压U和流过它的电流i满足的关系是:U=L*di/dt。di表示的是电流的变化量,dt表示的是电流变化di所花费的时间。
ΔIon和ΔIoff表示的是电流的变化量,di也表示的是电流的变化量。Δ和d这两个符号都表示变化量,那么,在U=L*di/dt这个式子中,我们把di用Δi来表示,dt用ton或者toff来表示。U=L*di/dt就变成了U=L*ΔIon/ton,也就是说,ton时间段内电流的变化量是ΔIon。
在toff时间段内,电流变化量是ΔIoff,所以U=L*di/dt就变成了U=L*ΔIoff/toff
Uon=L*ΔIon/ton中,整理一下可以得到ΔIon=Uon*ton/L
Uoff=L*ΔIoff/toff中,整理一下可以得到ΔIoff=Uoff*toff/L
那么,由ΔIon=ΔIoff,推出了Uon*ton=Uoff*toff



在MOS管导通期间,也就是ton期间,电流的变化量等于ΔIon,电感两端的电压Uo等于Vin-Vo
,也就是说,Uon=Vin-Vo=L*di/dt=L*ΔIon/ton,变形得到ΔIon=(Vin-Vo)*ton/L。
在MOS管断开期间,也就是toff期间,电流的变化量等于ΔIoff,电感两端的电压Uoff等于Vo+0.7V,我们就近似认为Uoff=Vo,也就是说,Uoff=Vo=L*di/dt=L*ΔIoff/toff,变形得到ΔIoff=Vo*toff/L。
由于ΔIon=ΔIoff,所以Vo*toff=(Vin-Vo)*ton。上面就是伏秒平衡公式

二十二、在电感的3种工作模式中,只有BCM和CCM满足伏秒平衡,DCM是不满足伏秒平衡

在DCM模式中,MOS管导通时间ton时间内电流的变化量是多少?
是ΔIon,DCM和BCM模式下,ΔI=Ipk

电流下降了ΔIoff的电流,所花费的时间是多少呢?电流从最高值下降到0花费了多少时间?
是t2-t1。
BUCK电路稳定时,DCM断续模式,满足ΔIon=ΔIoff吗?
是满足的。ΔIon=ΔIoff对所有模式都是成立的。
BUCK电路稳定时,DCM断续模式,满足(Vin-Vo)*ton=Vo*toff吗?
对于DCM断续模式,U=L*di/dt,Uoff=L*ΔIoff/dt,这里的dt就不等于toff了
紫色这一段对应的是:电流下降了ΔIoff,对应电流下降ΔIoff所用的时间就是t1到t2之间。
DCM断续模式下,U=L*di/dt推导伏秒平衡公式的时候,Uoff=L*ΔIoff/dt,这里的ΔIoff对应的时间应该是(t2-t1)。应该这样写才对Uoff=L*ΔIoff/(t2-t1)
所以我们刚才推导出来的伏秒平衡不满足DCM断续模式
伏秒平衡公式对于BCM和CCM模式都是满足的。
二十三、占空比
在一个周期T中,MOS管导通的时间是ton,MOS管断开的时间是toff
公式:ton/T=D,D就是占空比
D表示的就是MOS管导通的时间占整个周期的比例
所以,我们的伏秒平衡公式可以化为:

我们由伏秒平衡公式和ton/T=D,推导出了占空比和输入输出电压之间的关系:D=Vo/Vin
占空比和输入输出电压之间的关系:D=Vo/Vin
负载Io恒定不变,BUCK电路要想稳定,占空比就要设定为输出电压除以输入电压,也就是D=Vo/Vin。
由于伏秒平衡公式只适用于临界连续BCM模式和CCM连续模式,所以说明BCM和CCM模式的占空比是固定不变的,占空比都等于Vo/Vin,DCM模式的占空比是根据负载大小调节的,到了BCM模式的时候,占空比就达到最大了,负载再加大的时候,占空比不变,这时候增大电流的方式是通过若干个周期的调节使电感中平均电流上升(BCM模式到CCM模式电感电流曲线向上平行移动)。
举例
假设负载电压Uo=15V,负载电流Io=0.3A保持不变,当Io=0.3A时BUCK电路工作在DCM断续模式
这个时候BUCK电路要想稳定工作,电感电流要满足,电感平均电流Iav=负载电流Io,或者说ΔIton=ΔItoff

DCM模式下,电感平均电流Iav是小于腰线电流IL的
我们假设当负载电流Io=0.3A的时候,BUCK电路工作在DCM断续模式,而且BUCK电路要想稳定工作,电感的平均电流Iav=负载电流Io=0.3A
假设当负载电流Io=0.3A的时候,占空比D=ton/T=0.2
现在负载电压Uo=15V不变,负载电流Io从0.3A增大到0.5A了,那电感电流应该如何变化啊?
每个周期的时间中,MOS管导通的时间变长,断开的时间变短,这样就可以让电感电流变大。
因为电感电流的斜率是不变的,想让电感电流变大,只能增加MOS管的导通时间
我们假设当负载电流Io=0.5A的时候,依然工作在DCM断续模式

BUCK电路的控制回路会让MOS管导通的时间变长,也就是让ton时间变长,而一个周期的时间T不变,ton变长,占空比D=ton/T就会变大,假设当负载Io从0.3A增大到0.5A的时候,占空比D从0.2增大到了0.3,如上图所示。
让红色直线的上升时间ton变长,紫色直线平行移动,电感平均电流Iav就从0.3A增大到0.5A了
现在负载电流Io继续增大,现在假设负载电压Uo=15V,负载电流Io又变大了,Io从0.5A增大到0.7A,BUCK电路要想稳定,是不是就要让电感的平均电流Iav也增大,Iav要增大到和负载电流Io相等,也就是让Iav=Io=0.7A,假设负载电流Io=0.7A的时候,电感工作在BCM临界连续模式,占空比D增大到最大占空比D=0.4,我们刚才知道了在BCM临界连续模式下和CCM连续模式下的占空比D都等于最大占空比D=0.4

电感电流波形如上图
电感电流是上升斜率和下降斜率保持不变啊,让上图中红色直线所示的电流上升直线的倾斜程度保持不变,让电流上升直线(红色直线)的上升时间ton变大,电流下降直线(紫色直线)的倾斜程度保持不变,紫色直线的长度变大,平行的移动紫色直线的位置,让紫色直线在每个周期结束的瞬间刚好下降到0,如上图所示,因为ton时间变长了,所以占空比D=ton/T变大了,并且BCM临界连续模式下占空比D是最大值0.4,之所以让电流上升直线的上升时间ton变长,是要让电流上升直线上升到的最高点最大,让电感电流的平均电流Iav变大
现在负载电压Uo=15V依然不变,负载电流Io从0.7A增大到1.4A的时候,但是ton增大了,D=ton/T就增大了,但是BCM和CCM模式下的占空比都是最大占空比0.4,是不是矛盾了啊,我们说的BCM和CCM模式下的占空比D都是最大占空比,指的是稳定工作状态下的占空比是最大占空比0.4,BCM模式到CCM模式的转换过程是瞬态的过程,这个瞬态的过程会经过若干个周期,是BCM到CCM的过渡阶段,这个过渡阶段的占空比可能会达到100%,也就是这个瞬态的调整过程中,每个周期内MOS管可能是一直导通的

我们上图的瞬态过程只画了1个周期,实际上可能有若干个周期的调整过程
即使再瞬态过程中,电流的上升斜率和下降斜率也依然保持不变
当从BCM到CCM模式后,两个模式下的占空比相等,都等于0.4
也就是上图中的ton1=ton2,toff1=toff2
总结
当负载电流Io小的时候,电感工作在DCM断续模式,在DCM模式中,当负载电流Io增大的时候,MOS管占空比增大,当占空比增大到最大占空比的时候,电感从DCM断续模式变为BCM临界连续模式,当负载电流Io继续增大的时候,MOS管会通过若干个周期的调整,在这若干个调整周期中,MOS管的占空比可能会达到100%,目的是让电感电流的峰值上升,占空比等于最大占空比,电感电流的峰值变大了,就相当于把电感电流曲线向上平移了,当电感平均电流Iav增大到等于负载电流Io的时候,BUCK电路重新达到稳定以后,这个时候MOS管的占空比等于最大占空比。
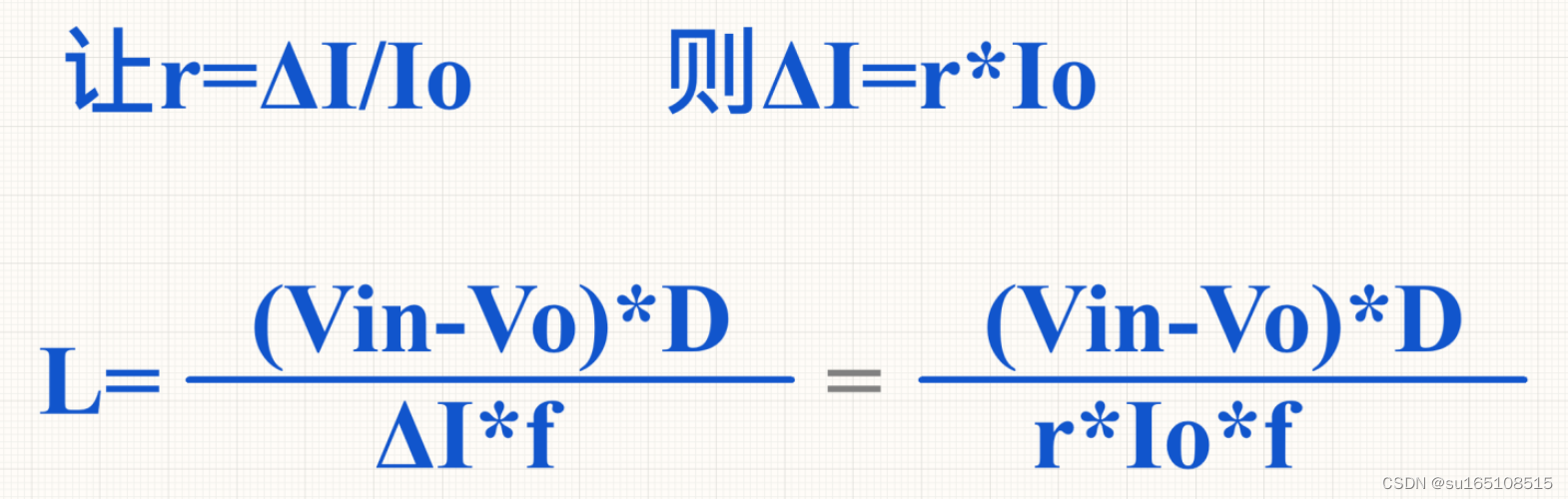
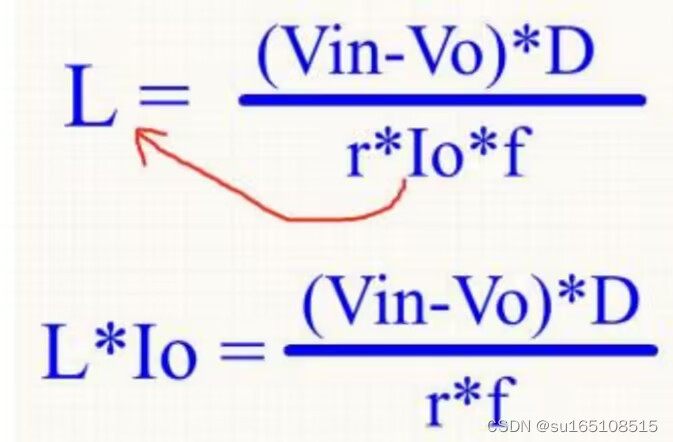
二十四、纹波率
纹波率r=ΔI/Io
ΔI表示电感电流的峰峰值
Io表示负载额定电流

BUCK电路能够稳定工作,需要满足的条件ΔIon=ΔIoff,也就是MOS管导通期间,电感电流的上升值等于 MOS管关断期间,电感电流的下降值,也就是说,在每个周期刚开始的时候,和每个周期马上要结束的时候,电感中的电流要相等,在三种工作模式下,BUCK电路稳定的话,就要ΔIon=ΔIoff=ΔI,三种工作模式之间切换的时候,是瞬态,三种工作模式下,稳定工作的时候,是稳态
toff期间,电感两端电压U等于输出电压Vo+0.7V,我们忽略这0.7V,认为在toff期间,U=Vo,所以在toff期间,U=L*di/dt写成了Vo=L*ΔIoff/toff,ΔIoff是toff期间电感电流下降的量,toff是MOS管断开的时间,现在我们把这个式子变一下形,把L移到等号一边

我们把1-D=toff/T,T=1/f代入上式,得到了下面的式子

其中,MOS管的周期是T,频率f=1/T
因为这个式子只适用于BCM和CCM模式下,上面式子中的D代表的占空比
DCM模式下的占空比是随着负载变化而变化的
BCM和CCM模式下占空比是不变的,保持最大占空比
上面的式子是toff对应的ΔIoff推导出来的
DCM模式下ΔIoff对应的时间是少于toff的
而BCM和CCM模式下ΔIoff的时间等于toff

在DCM断续模式下,在toff期间,di=ΔIoff,但是dt ≠ toff
DCM模式下,ΔIoff对应的时间是t2-t1,不是toff
Vo=L*ΔIoff/toff所以这个公式不适用于DCM模式,只适用于BCM和CCM模式
由Vo=L*ΔIoff/toff推出来的
那么,里面的占空比D就是BCM和CCM模式下的占空比
请问这个D代表的是什么?
最大占空比,因为在BCM和CCM模式下,占空比D就是最大占空比
并且最大占空比D=Vo/Vin
我们把最大占空比D=Vo/Vin代入上式,就得到了电感量L的表达式

电感量L的表达式,它只适用于BCM和CCM模式,并且只适用于稳态的情况,其中D是最大占空比
当需求确定了以后,比如BUCK电路的输入电压Vin,输出电压Vo确定了以后,上面式子的最大占空比D=Vo/Vin也就知道了。
f是MOS管的开关频率
那么上面式子中,就只有ΔI是未知的了。
其他的都可以根据已知需求来确定,我们引入一个纹波率的概念,纹波率用字母r来表示,规定纹波率r=ΔI/Io,ΔI表示电感电流最大值和最小值之间的差, Io表示额定负载电流,所以,我们把纹波率的公式r=ΔI/Io代入上式。

它是由输入电压Vin,输出电压Vo,最大占空比D,频率f,负载额定电流Io,电感电流纹波率r来决定的
我们在设计BUCK电路的时候,当BUCK电路的设计需要知道了以后,输入电压Vin,输出电压Vo是不是就已经知道了
最大占空比D=Vo/Vin也就知道了吧
而MOS管的周期T是固定不变的,频率f=1/T也是固定的
所以,在这个式子中就只有ΔI是需要我们来设计的
这里引入一个纹波率的概念
用字母r表示纹波率
并且纹波率r=ΔI/Io

ΔI=ΔIon=ΔIoff
ΔI表示电感电流最大值和最小值之间的差
Io表示额定负载电流,注意Io表示的是额定负载电流,实际的负载电流大小不一定等于Io,可能比Io大,也可能比Io小。
所以,我们把纹波率的公式r=ΔI/Io代入上式
就得到了下面的公式
上面的式子是由输入电压Vin,输出电压Vo,最大占空比D,频率f,负载额定电流Io,电感电流纹波率r来决定的,Vin,Vo,D,f,Io都是可以知道的
负载额定电流Io在设计需求里会告诉大家的,包括输入电压,输出电压,都会告诉大家的
我们只需要看电感电流纹波率r是如何得到的
大家注意了,纹波率r=ΔI/Io,纹波率定义的时候是按照负载额定电流Io的大小来定义的,负载实际电流是变化的,不可能时刻等于负载额定电流Io。
举例
比如我们要设计一个BUCK电路,它的输入电压Vin=30V,输出电压Vo=15V,额定负载Io=1A
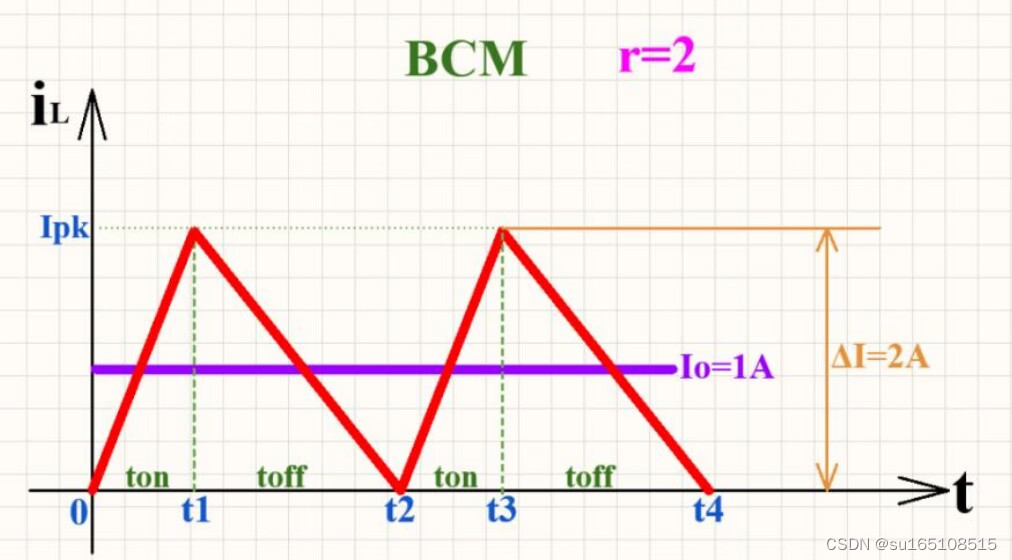
假设在负载额定电流Io=1A的时候,BUCK电路刚好工作在BCM模式下
那么电感电流波形如下

BCM临界连续模式,电感平均电流Iav等于负载额定电流Io等于1A
所以电感电流的峰值电流等于Ipk=2*Iav=2A
因为是临界连续模式,所以电感平均电流Iav就等于电感腰线电流,所以峰值电流Ipk是平均电流的2倍,假设现在负载电流Io从1A增大到1.5A,BUCK电路会如何变化?
电感的平均电流要等于负载平均电流,负载电流Io从1A增大到1.5A了,电感平均电流Iav也要从1A增大到1.5A才行,才能够满足负载的需求。那么,上面的电感曲线要向上平行移动。
让三角形的腰线从Iav=1A上移到Iav=1.5A

上图中Io=Iav=1.5A,上图中的Io就是三角形的腰线位置,ΔI是三角形最高点与最低点之间的差值
那么,请问大家,根据刚才我们规定的纹波率r的概念,现在的纹波率r是多少呀
刚才BCM模式下,ΔI等于2倍的电感平均电流,ΔI=2A,所以现在ΔI也等于2A
Io=1.5A,ΔI=2A,那么纹波率r=ΔI/Io=2A/1.5A=1.33,也就是CCM模式下,纹波率r=1.33

我们再看一下,刚才在BCM模式下,纹波率r等于多少?
BCM模式下,输出电流Io=1A,ΔI=2A,所以纹波率r=ΔI/Io=2A/1A=2
当输出电流Io=1A的时候,BUCK电路工作在BCM模式下,纹波率=2
当输出电流增大到1.5A的时候,BUCK电路工作在CCM模式下,纹波率=1.33
也就是说,电感平均电流变大的时候,纹波率就变小了
也可以说负载平均电流变大的时候,纹波率就变小了

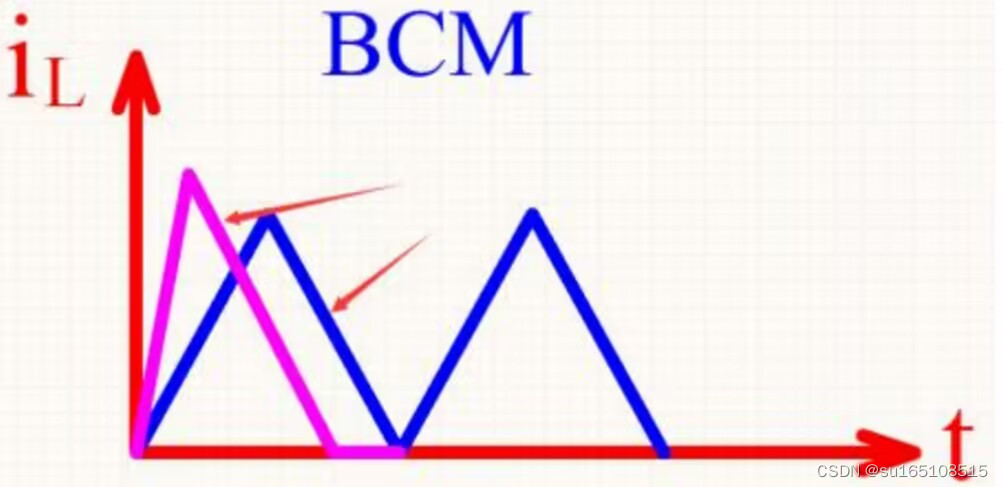
我们看左边紫色的箭头,BCM模式下, 红色三角形向上移动,就变成了CCM模式
大家发现没有,纹波率r就是交流量ΔI除以直流量Io,对不对?
现在假设负载电流Io从1.5A增大到2.5A的时候,此时电感电流的波形应该如何变化?此时纹波率等于多少?
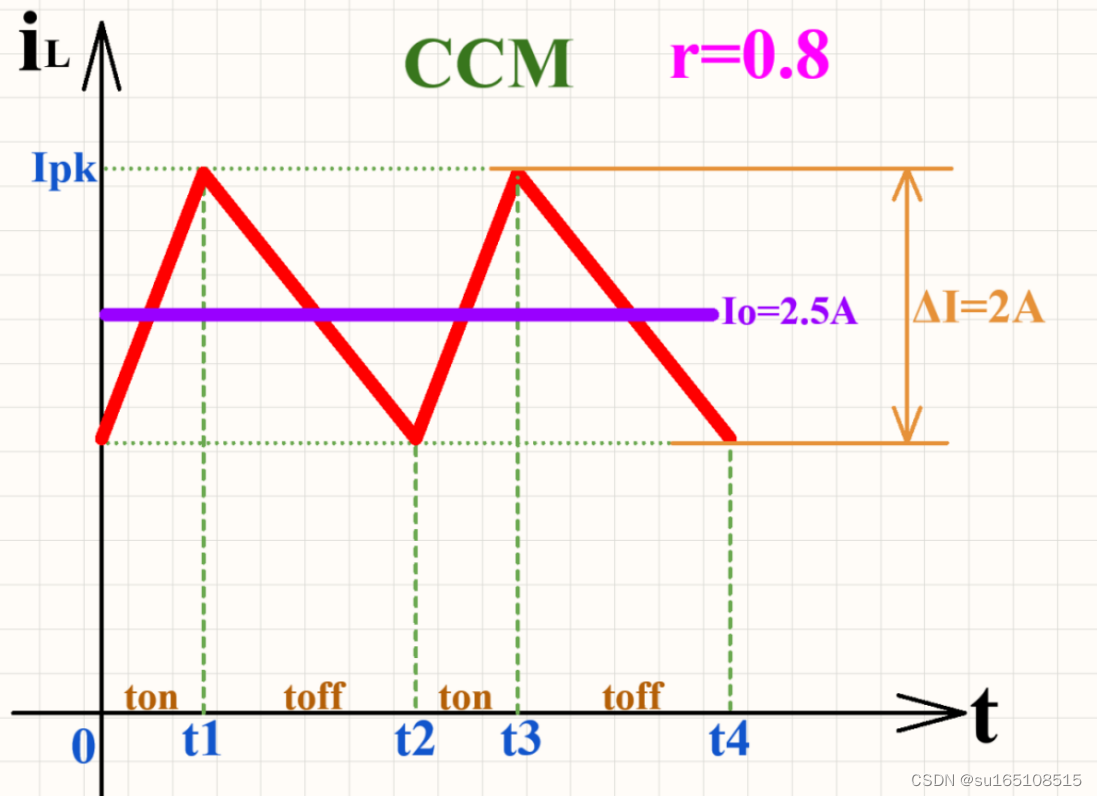
当负载电流Io从1.5A增大到2.5A的时候,BUCK电路依然工作在CCM模式,红色电流曲线继续平移就可以了,红色曲线平行上移,ΔI=2A不变,Iav=Io=2.5A,所以纹波率r=ΔI/Iav=0.8。
我们把刚才的过程画在一张图里
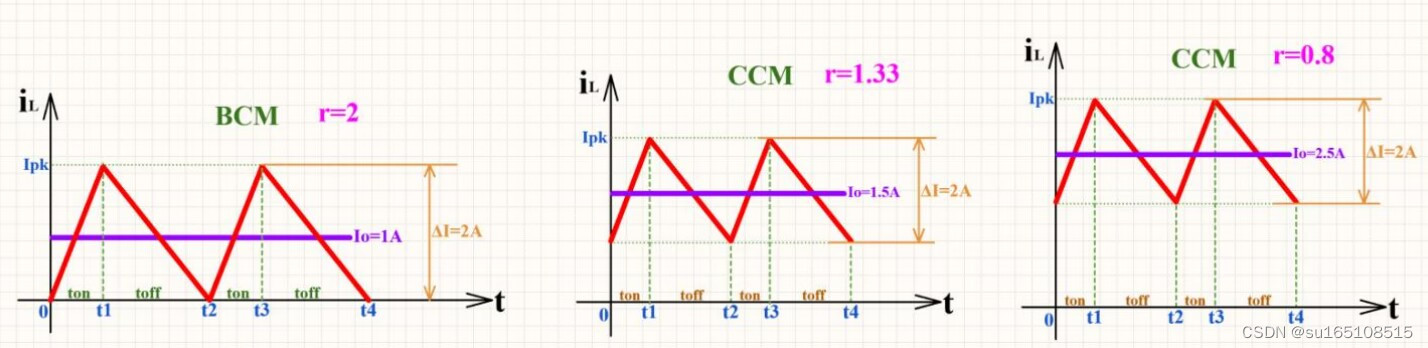
1、 Io是负载电流的大小,负载电流Io=1A的时候,电感平均电流也等于1A,BUCK工作在BCM模式
2、随后Io增大到1.5A,电感平均电流也要增大到1.5A,以满足负载需求,这时候电感电流曲线会上移,BUCK工作在CCM模式
3、随后Io增大到2.5A,BUCK依然工作在CCM模式,只不过电感的平均电流要从1.5A增大到2.5A了,电感电流曲线再次上移以使电感平均电流Iav重新和负载电流Io相等
大家看上图
负载电流Io上升,电感平均电流Iav也跟着上升,电感平均电流Iav始终和负载电流Io相等,电感平均电流Iav是红色三角形的腰线,Iav上升,电感波形向上平移,电感波形的形状不发生变化,只是向上平移。
那么我们再看纹波率,也就是随着负载电流Io的变大,纹波率r会变小,也就是随着负载电流Io的变大,纹波率r会变小,BCM模式下,纹波率r一定是等于2的,因为BCM临界连续模式下,负载电流Io必然等于电流峰峰值ΔI的一半,所以BCM模式下,纹波率r一定是等于2的。
一般情况下电源的负载不是一成不变的,负载会在一个范围内变化,比如说负载Io的变化范围在1A到2A,如果一个BUCK电源在最大负载下刚好是BCM模式,那么,当负载Io变小的时候,是不是就会工作在DCM模式下了啊,我们现在假设BUCK电源的负载Io的变化范围为2A到3A,如果一个BUCK电源在负载Io=2A的时候刚好工作在BCM模式,那么在负载Io的整个2A到3A的变化范围内,BUCK电路工作在什么模式啊?
负载电流2A<Io<=3A时工作在CCM模式,负载电流变大了以后,电感电流平行上移,向CCM模式走
假设BUCK电路在0.5A时恰好工作在BCM模式,那么在0A到0.5A的时候,BUCK电路工作在DCM断续模式,在0.5A到1A的时候,BUCK电路工作在CCM模式下
那么,请问大家,如果一个BUCK电源的额定负载Io=1A,我们把0.5A的时候设定在BCM模式,那么当在额定负载1A的时候,纹波率等于多少啊?是1的。

BCM模式下,纹波率一定等于2
把0.5A的时候设定在BCM模式,当在额定负载1A的时候,纹波率r=ΔI/Io=1A/1A=1
如果一个BUCK电源的额定负载Io=1A,我们把0.8A的时候设定在BCM模式,那么当在额定负载1A的时候,纹波率等于多少啊
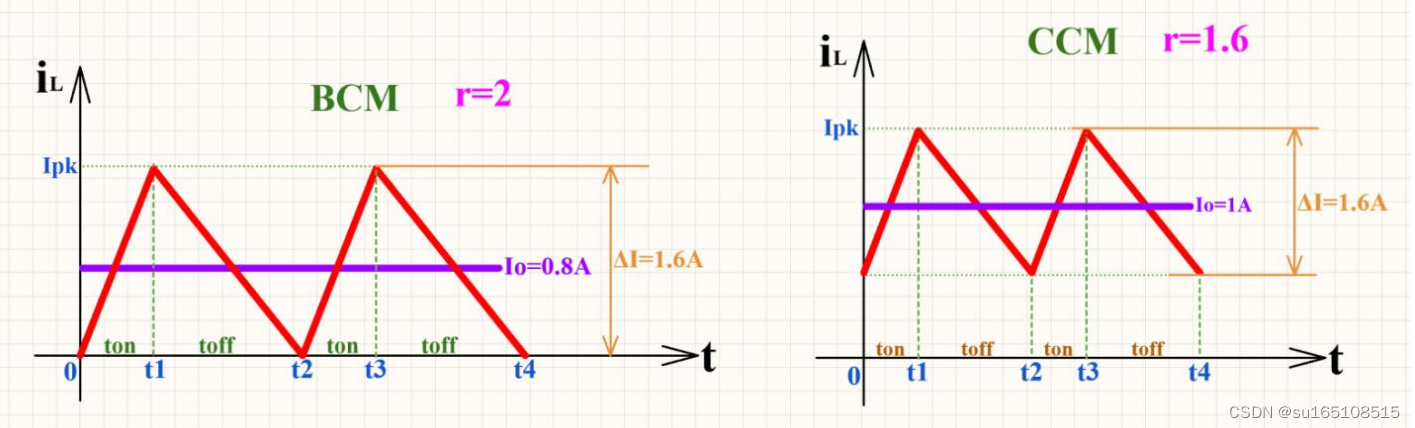
那么,当负载平均电流从0.8A上升到1A的时候,电感平均电流也跟着从0.8A上升到1A
那么,当电感电流变成1A的时候,ΔI依然等于1.6A不变
所以纹波率r=ΔI/Io=1.6A/1A=1.6
如果我们按照纹波率r=0.4来设计BUCK电路的话,对于额定负载Io=1A的情况,我们需要把负载Io设定在多少的时候让BUCK电路工作在BCM模式?
纹波率r=0.4,也就是在额定负载Io=1A的情况下r=0.4
r=ΔI/Io=ΔI/1A=0.4,那么就可以得到ΔI=0.4A
ΔI=0.4A了,在BCM模式下纹波率r=2,那么Io等于多少啊?
在BCM模式下,纹波率r=2=ΔI/Io=0.4/Io,所以Io=0.4A/2=0.2A
也就是我们要将负载Io=0.2A的时候将BUCK电路设定在BCM模式
我们再强调一下,一般情况下我们说BUCK电源的纹波率,指的是在额定负载下的纹波率
我们设定Io在1A的时候让BUCK工作在BCM模式,那么这个BUCK电源的纹波率r=2是在负载Io=1A下的纹波率
我们说BUCK电源的纹波率指的是额定负载Io=2.5A时候的纹波率,那么大家看,BUCK电源的最大电流Ipk等于多少?
BCM模式下,Ipk就等于ΔI,对不对
CCM模式下,Ipk=Io+0.5*ΔI=2.5A+0.5*2A=2.5A+1A=3.5A
如果我们将Io=1.6A的时候让BUCK电源工作在BCM模式,那么在Io=1.6A时纹波率r=2
也就是r=ΔI/Io=ΔI/1.6A=2,求得ΔI=3.2A

现在我们要求BUCK电源的纹波率,也就是求在额定负载Io=2.5A时的纹波率,那这个纹波率等于多少啊

r=ΔI/Io=3.2A/2.5A=1.28
电感中的最大电流Ipk是多少呀?
Ipk=Io+0.5*ΔI=2.5A+0.5*3.2A=4.1A
BUCK电源的额定负载Io=2.5A,当我们把纹波率r设计成0.8的时候,电感电流的最大值Ipk=3.5A
当把纹波率r设计成1.28的时候,电感电流最大值Ipk=4.1A
大家发现了没有,是不是纹波率越大,电感的最大电流Ipk越大啊
对于电感来说,要保证电感在最大电流Ipk下工作时不能饱和吧
那电感中最大电流Ipk越大,选择电感的时候,就要选择电感的饱和电流越大的
而电感的饱和电流是和磁芯体积呈正相关的,电感的饱和电流越大,电感的磁芯体积就越大
不仅仅是磁芯体积,电感的饱和电流也越大,电感的线径也越大
所以BUCK电源的纹波率r越大,电感的磁芯体积就越大,成本就越高
这是我们设计BUCK的时候需要考虑的成本的因素

二十五、 纹波率r大了,电感的感量L就会变小
我们看,当纹波率r变大的时候,电感量L是不是变小了。

对于上面的式子来说,r越大,L就越小,也就是说纹波率r大了,电感的感量L就会变小,纹波率r大了,峰值电流Ipk就变大了,所以,一般情况下,我们把纹波率r设计在0.4。
我们再把上面的式子变一下形,把Io移到等号左边,就成了上面的式子

我们把红框中的式子用一个参量来Et来表示
由于红框内的单位是V*s,所以,我们把它叫做伏秒积
r 一般取 0.4,它是一个常数,在上式中就把r当成常数来对待
那么大家看,上面的伏秒积表示的物理意义是什么
伏秒积Et表示的是电感的能量处理能力,而电感的能量处理能力是和电感的体积相关的
我们有这样一个结论:Et 越小,电感体积越小,Et 越大,电感体积越大
那么,电感的能量处理能力和电感的体积有关,这句话怎么理解啊
这里我们不妨打个比方 ,BUCK电感的本质是起到能量搬运的作用
比如说,我们造一栋房子,需要砖块对吧,如果我用一辆大卡车运输砖块的话,是不是单次搬运的砖块会很多,这样的话,每次使用大卡车拉一次砖块,够用很长一段时间,也就是说,用大卡车运输砖块的话,频率可以很低,但是,如果用小板车运输砖块的话,是不是需要搬运的次数就更多了
类比电感的话,电感的体积越小,电感的能量处理能力就越低,电感的频率就要越高,这就是电感的能量处理能力和体积相关 的概念

看上面的公式,频率f越高,电感的体积就越小,也就是电感搬运的频率越快,电感的体积可以做越小,同样的,频率越低,电感的体积越大,
那么,根据上面的分析,我们从电感的体积角度来说的话,要求电感体积要小的场合,我们要让BUCK电路的工作频率f越高。
除了考虑体积因素外,还要考虑输入电压Vin,请问大家,BUCK电路的最大占空比D是由什么决定的?
BUCK电路的最大占空比Dmax=Vo/Vin,如果 Vin 越高的话,请问 Dmax 是不是越小啊
比如说一个BUCK电源,Vin = 310V,Vo = 15V,那么最大占空比Dmax = 4.8%
也就是说这个BUCK电源的最大占空比只有百分之4.8
如果这个BUCK电源工作在DCM模式下,占空比比4.8%还要更小
因为BCM和CCM模式下,BUCK的占空比是最大占空比,DCM模式下的占空比小于最大占空比
现在假设BUCK的频率f是固定不变的,BUCK的输入电压Vin=150V,输出电压Vo=15V,最大占空比D=15V/150V=10%
现在BUCK的输入电压Vin从150V增大到310V了,输出电压Vo=15V不变,那么现在的最大占空比D是多少?
对的,D=Vo/Vin=4.8%,也就是说,输入电压Vin增大的时候,最大占空比D减小
D=ton/T,所以ton=D*T,周期T不变,占空比D减小,那么ton怎么变化啊
ton会减小,而我们知道,电感本身具有阻碍电流变化的作用
当一个 BUCK 电源的工况确定了之后,也就是输入电压Vin、输出电压Vo、额定负载Io确定了以后,其实电感电流的变化斜率也就确定了
U=L*di/dt ,在 ton 期间,Uon = Vin - Vo不变,所以di/dt = Uon/L不变
同理,toff期间,在电感电流变化斜率一定的情况下,toff时间越短,电流下降的就越小

我们说,当一个 BUCK 电路工况确定之后,也就是Vin、Vo、L确定了之后,是不是在 ton 期间的电感电流斜率就确定了啊,我们还知道,电感在一个周期内的平均电流就是负载电流
当 Vin 越大时,ton 其实是越小的,ton 减小后,是不是电感上的电流就会变小啊?
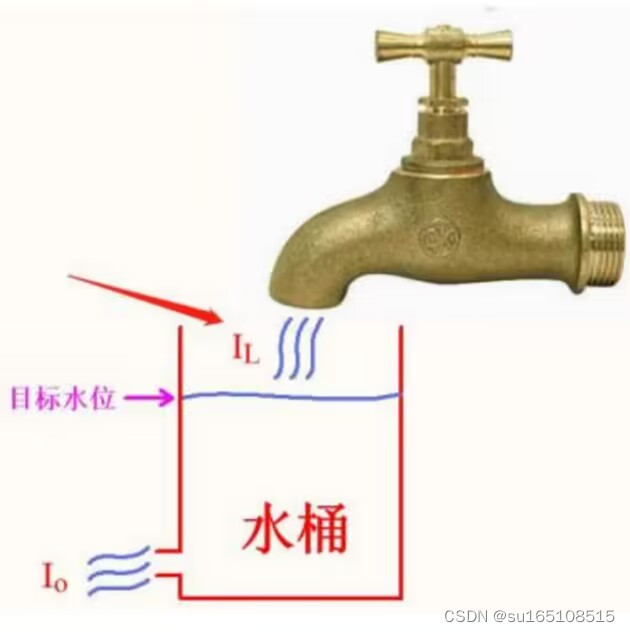
可以拿自来水龙头的图片来联想一下
既然电感上升的电流越小,是不是表示带载能力就越弱啊?
所以,我们可以得出结论,在输入电压 Vin 很高的情况下,频率是不能高的,否则带载能力不能满足,那么,这就是BUCK电感的工作频率 f 和 Vin 之间的关系。
二十六、BUCK电感的工作频率 f 和输入电压 Vin 之间的关系
其实我们这里可以举一个例子,让大家感受一下

这是一款BUCK芯片的数据手册
如果我们设计一款5V转3.3V的BUCK电源的话,就可以选择这款芯片
它的工作频率f=1.5MHz,这个频率在BUCK电源中是相当高的了,我们刚才分析得出来的结论是:输入电压Vin越高,频率f要低,否则不能满足负载的需求。
那么这个结论就是,输入电压Vin越低,频率f是可以做到很高的,而上面的BUCK芯片,它的输入电压Vin=5V,输入电压Vin是不是很低了啊,所以,频率f可以做的很高。
而频率f很高,就可以把电感体积做的很小
我们要知道,对于5V转3.3V的场合,多数是给单片机来用的
多在物联网等尺寸空间要求小的场合使用,所以,必须用体积小的电感才可以
刚才我们谈了BUCK电源的工作频率f和体积,以及Vin对BUCK电源的影响
其实,频率f还间接的和负载Io有一定的关系
其实刚才也提到了一点,不知道大家有没有注意
我们可以这么说:一般情况下,f 越低,Io 越小;f 越高,Io 越大
要理解这句话,可以从电感的特性的角度去理解
我们说,电感具有阻碍电流变化的能量,而一般频率f低的场合,电感量L是比较大的

其实通过这个公式也能看出来,当f低时,电感量L越大,
那么,当电感量越大,是不是抑制电流变化的能力越强啊
由于抑制电流变化的能力越强,所以电感上的电流是不大的
也就是说带载能力弱啊,也就是Io越小
所以,我们可以这么说:一般情况下,f越低,Io越小
f越高,Io越大
总结:
BUCK电源的工作频率f和电感体积有关,
f越高,体积越小。f越低,体积越大
BUCK电源的工作频率f和输入电压Vin有关
Vin越大,频率f越小。Vin越小,频率f越大
最后是一个经验总结:频率f越低,Io越小。频率f越高,Io越大
一般我们在设计高压 BUCK 时,比如说 310V 转 15V,它的工作频率 f 相对来说低一些,最高一般是 250kHz
一般对于低压 BUCK,比如说刚才举例的 5V转 3.3V,它的工作频率相对来说高很多,最高可以达到 2MHz 左右
需要告诉大家的是,在对于 250KHz~500KHz 以上的BUCK电源来说,一般都是用BUCK芯片来做的
因为BUCK电源的工作频率,还和它的整个环路面积是有关的,我们要知道,在一个高频回路中,如果这个回路太大,那么寄生参数也很大,这样的话BUCK电路是无法正常工作的
所以,一般对于高频BUCK来说,它的回路必然要小,只有芯片能做到这一点,所以,如果大家用分立器件搭建BUCK电路的话,由于是分立器件,做不到芯片那样小,所以,分立器件的工作频率是高不了的
二十七、BUCK电路的输入电压Vin和BUCK电感有什么样的关系
我们知道,一般BUCK电路的输入电压Vin不是一个固定的值,而是有一定的范围
比如说,BUCK电路的输入电压Vin=24V-36V
那我们设计BUCK电路的时候,到底是按照24V来设计,还是按照36V来设计呢
要解决这个问题,就要研究一下输入电压Vin的不同,对BUCK电路有什么影响了

假如说,一个BUCK电路刚好工作在BCM模式,在其他条件不变的情况下,只是把输入电压Vin增大

当MOS管开通后,电感两端的压降就是Vin-Vo
而在ton期间,电感的电流变化率di/dt=Uon/L=(Vin-Vo)/L
所以,当Vin增大时,di/dt整体是增大的
di/dt整体是增大的,就是电感电流上升斜率变陡
我们看上面这个粉色的线,很明显,它比之前的蓝色线的上升斜率更陡

那么,当MOS管关闭后,电感电流的变化率怎么变化啊,忽略二极管D上的管压降
Uoff=L*di/dt,di/dt=Uoff/L,Uoff=Vo
Vo不变,那么di/dt=Vo/L,也就是电感电流斜率di/dt不变
也就是说,不管Vin在它允许范围内如何变化,只要BUCK输出电压Vo不变,那么电感电流的上升斜率会随着Vin改变,下降斜率不变
粉色和蓝色的下降斜率应该是保持一致的
这是我们定性分析的结果
当粉色的下降斜率和之前保持一致的话,在toff期间,电感电流就会提前达到0
这样的话,就会有一段时间,电感电流为0
很明显,这时电感处于DCM断续模式
我们还可以从另一个方面验证一下,刚才假设的是输入电压Vin增大,其他条件不变
也就是说,负载Io也是不变的

粉色的三角形可以看做电感在一个周期内传输的能量,它是等于蓝色三角形在一个周期内传输的能量的
也就是在一个周期中,粉色三角形和蓝色三角形的平均值应该相等,并且都等于负载电流Io
由于输入电压Vin增大了,导致了电感电流最大值(峰值电流)增大了
但是粉色三角形在一个周期内断续了,所以粉色三角形在一个周期内的平均值,还是和负载电流Io相等的
我们可以做一个假设
我们看上图,假设当Vin增大后,电感依然工作在BCM模式的话,很明显能看出来电感平均电流Io增大了
所以,当输入电压Vin增大以后,电感必然工作在DCM模式
所以,上图中我们就用Io代表Iav了
大家要注意,上升曲线变陡峭了,下降曲线的斜率不变
所以,Vin增大后,输出电流Io不变的话,电感必然工作在DCM模式

如果Vin增大后,电感从BCM变成CCM的话,Io是更大的,所以这是不可能的
所以,一个BUCK电路工作在BCM模式的话,如果Vin增大,其他条件不变的话,那么电感的工作模式就变成了DCM
至于为什么当输入电压Vin变大后,峰值电流Ipk会变大,我们依然可以做一个假设
至于为什么当输入电压Vin变大后,峰值电流Ipk会变大,如上图所示
大家看,当电感电流达到Ipk以后,电感电流就会和之前一样的斜率下降
是不是就变成了粉色的波形了
那粉色三角形的平均电流Iav和蓝色三角形的平均电流Iav相比的话,有什么变化?

是的,粉色三角形的平均电流Iav会变小
因为粉色三角形有一段是电流为0的
而粉色三角形的平均电流Iav是小于负载电流Io的,这样的话就不满足负载的需求了
所以,输入电压Vin变大后,要让BUCK电路稳定工作,峰值电流Ipk是增大的
当 Vin增大后,Ipk增大,是环路调节的结果
后面我们就会学习BUCK电路的控制环路,会学习控制环路如何调节
当我们正常控制自来水龙头给水桶加水时,如果水龙头上的水压突然增大,也就是水龙头的出水速度突然变急的话
我们会以更短的ton时间就把水龙头关闭
要想保持水桶水位不变,水龙头出水急了的话,打开水龙头的时间ton就要变短了
那么,我们再来分析一遍,当输入电压Vin减小时,电感是如何工作的
我们通过刚才的分析,已经知道了当输入电压Vin减小时,会从BCM变成CCM模式

上面粉色的线,di/dt是变小之后的对吧,Vin变小,所以电流的上升斜率变小
而toff期间,也就是MOS管关断期间,电流下降的斜率不变
所以,大家可以把Vin变小后的波形画出来了吗?

斜率是这样子的,稳定以后的波形是什么样子的?

那么占空比D是怎么变化的?
是的,占空比变大了
当输入电压Vin突然变小时,要想满足同样的负载Io输出, ton的时间是比之前的要大的
在瞬态的时候,MOS管导通时间变长,此时我们是不谈占空比的
我们说的占空比,只是针对稳态时候谈占空比

比如说,这是我们之前讲解的波形
当一个BUCK电路,当负载Io突然变大的时候,电感要从BCM变成CCM模式
在从BCM变成CCM模式的中间,会经历一个暂态过程
在这个暂态过程中,MOS管会持续的开通,以满足负载Io的需求
而此时的占空比我们可以不严谨的说是“100%”
但是,一般负载突变的瞬态变化,是不谈占空比的
那么,再回到最初提出过的问题
一般我们设计BUCK电路时,它的输入电压并不是一个固定的,而是一个范围值
输入电压Vin在一个范围内变化,也有人称为:“宽电压输入”
比如说,输入电压Vin的范围在24V~36V
那么请问,对于这样的宽电压输入范围的BUCK电路来说,我们是根据最低的输入电压Vin来设计,还是根据最高的输入电压Vin来设计啊?

是按照最高输入电压来设计还是最低输入电压来设计?
是要按照最高电压Vin来设计
大家注意哦,Io是负载决定的,所以,Io都是一样的
从上面这幅图可能看的不太直观,我们换一种表达,大家可能就能看的出来了

假设我们按照Vin=36V,Io=1A时,BUCK电路刚好工作在BCM模式下来设计的话,那么此时的峰值电流Ipk=2A
那么此时输入电压Vin减小,其他条件不变的情况下,电感波形是进入到CCM模式了
而且,Ipk会变小,对不对

按照最大输入电压将BUCK电路设计在BCM模式,其他条件不变,输入电压Vin减小的话,Ipk会比2A小
假设输入电压Vin的变化范围是24V到36V,因为最大输入电压Vin下都是BCM了,所以其他的输入电压Vin下肯定是CCM
从图中可以看出来CCM模式下的Ipk肯定比BCM模式下的Ipk小了
那么,假设我们按照最低输入电压Vin=24V来设计,Io=1A时让BUCK工作在BCM模式下

此时Ipk也是2A
但是,当输入电压Vin增大后,电感电流波形就会从BCM模式变成了DCM模式,此时Ipk怎么变化?
是的,此时Ipk是不是变大了啊

如果我们以最低输入电压Vin=24V来设计电感的话,肯定考虑到不能让电感饱和
也就是说,在设计电感时,是按照Ipk=2A来设计的
但是,实际情况电感的峰值电流并不是2A
当输入电压Vin增大后,Ipk会比2A更大,假设电感留的余量不够的话,电感会存在饱和的风险对吧
如果输入电压Vin的范围更宽一些呢?Ipk的差异会更大

但是,如果我们以最大输入电压Vin来设计电感的话,由于我们是根据Ipk=2A来设计的,电感在2A时是不会饱和的吧
那么请问,按照最高输入电压来设计是不是更安全啊
所以,要想设计更安全,我们是按照最高输入电压来设计的
这就是我们设计BUCK电路的时候需要考虑的一个因素
那我们看下面一个问题
BUCK电路的输出电压Vo是一个不变的数值,对吧
比如说Vo=15V不变
我们之前学习了纹波率的概念,对一般的BUCK电路来说,纹波率r取0.4就可以了
那么,知道了上面的已知条件以后,就可以将电感量L确定出来了,对不对
但是,对于BUCK电感来说,卖的都是标称功率的电感
所以,我们计算出来的电感量不一定刚好有卖的
但是不要紧,这无非影响到的是电感的工作模式
比如说,我们实际选型的电感量L比我们计算出来的电感量L要大
按照计算值,电感刚好工作在BCM模式的话,如果选型的电感量L要大的话,请问大家,电感的工作模式变成什么模式了呢?
是要往CCM模式走
当电感量L增大的时候,往CCM模式走
当电感量L减小的时候,往DCM模式走
我们来看一下为什么

蓝线是我们计算的电感量L,我们实际选型的电感量L比蓝线计算的电感量L大
粉线是实际选型的电感量L的电感波形,当电感量L增大的时候,电感中电流的斜率是不是就变缓了啊
U=L*di/dt,U不变,L变大,那么di/dt就变小了,对不对
所以,如果实际选型的电感量L比计算的电感量L大的话,电感的工作模式会向CCM模式走
所以,选择电感值接近的标称电感就可以了