本系列文章为原创,转载请注明出处。
作者:Dongdong Bai
邮箱: baidongdong@nudt.edu
若您觉得本博文对您有帮助,请您为我点赞并关注我,以鼓励我写出更优秀的博文。谢谢!
一、Sophus库简介:
Eigen库是一个开源的C++线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。但是Eigen库提供了集合模块,但没有提供李代数的支持。一个较好的李群和李代数的库是Sophus库,它很好的支持了SO(3),so(3),SE(3)和se(3)。Sophus库是基于Eigen基础上开发的,继承了Eigen库中的定义的各个类。因此在使用Eigen库中的类时,既可以使用Eigen命名空间,也可以使用Sophus命名空间。比如
Eigen::Matrix3d和Sophus::Matrix3d
Eigen::Vector3d和Sophus::Vector3d
此外,为了方便说明SE(4)和se(4),Sophus库还typedef了Vector4d、Matrix4d、Vector6d和Matrix6d等,即:
Sophus::Vector4d
Sophus::Matrix4d
Sophus::Vector6d
Sophus::Matrix6d
二、Sophus安装方式:
git clone https://github.com/strasdat/Sophus.git
cd Sophus
git checkout a621ff
mkdir build
cd build
cmake ..
make
三、Sophus的使用教程:
写在前面,这里有几个需要注意的地方:
1. Sophus库的各种形式的表示如下:
李代数so(3):Sophus::Vector3d //因为so(3)仅仅只是一个普通的3维向量
李代数se(3):Sophus::Vector6d //因为se(3)仅仅只是一个普通的6维向量
2. SO3的构造函数为:
SO3 ();
SO3 (const SO3 & other);
explicit SO3 (const Matrix3d & _R);
explicit SO3 (const Quaterniond & unit_quaternion);
SO3 (double rot_x, double rot_y, double rot_z);
3. SE3的构造函数为:
SE3 ();
SE3 (const SO3 & so3,const Vector3d & translation);
SE3 (const Matrix3d & rotation_matrix,const Vector3d & translation);
SE3 (const Quaterniond & unit_quaternion,const Vector3d & translation_);
SE3 (const SE3 & other);
4.SO3,SE3和se3的输出说明:
尽管SO3对应于矩阵群,但是SO3在使用cout时是以so3形式输出的,输出的是一个3维向量
SE3在使用cout输出时输出的是一个6维向量,其中前3维为对应的so3的值,后3维为实际的平移向量t
se3在使用cout输出时输出的也是一个6维向量,但是其前3维为平移值
ρ
(注意此时的
ρ
与SE3输出的t是不同的,t=J
ρ
,其中J是雅克比矩阵),后3维为其对应的so3.
四、SO3,so3,SE3和se3初始化以及相互转换关系
1.转换关系图: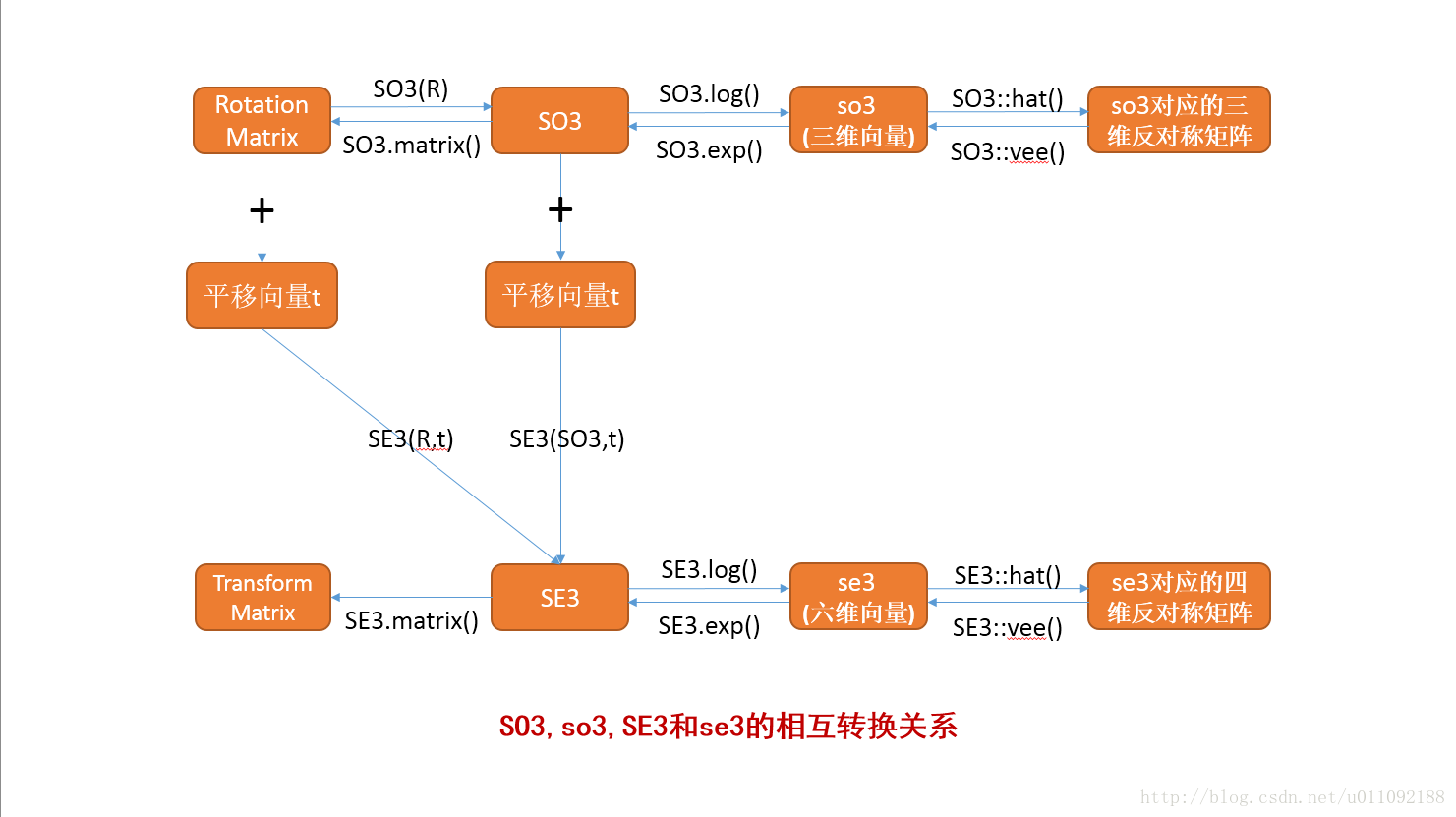
关于旋转矩阵,旋转向量和四元数的初始化和相互转换关系可以参考我的另一篇博文:http://blog.csdn.net/u011092188/article/details/77430988
2.代码示意:
下面是SO3,so3,SE3和se3初始化以及相互转换的示意代码useSophusc.cpp:
#include <iostream>
#include <Eigen/Core>
#include <sophus/so3.h>
#include <sophus/se3.h>
using namespace std;
//using namespace Eigen;
//using namespace Sophus;
int main(int argc, char **argv) {
//沿着Z轴旋转90度的旋转矩阵
Eigen::AngleAxisd A1(M_PI / 2, Eigen::Vector3d(0, 0, 1));//以(0,0,1)为旋转轴,旋转180度
Eigen::Matrix3d R1 = A1.matrix();
Eigen::Quaterniond Q1(A1);
//一、初始化的李群(SO3)的几种方式
//1.使用旋转矩阵初始化李群
Sophus::SO3 SO3_R(R1);
//注意:尽管SO(3)是对应一个矩阵,但是输出SO(3)时,实际上是以so(3)形式输出,从输出的结果可以看到,其输出的值与旋转角对应的值相同,这也证证实了SO(3)对应的李代数so(3)就是旋转角。
cout << "SO(3) SO3_R from Matrix" << SO3_R << endl << endl;
//2.使用四元数初始化李群
Sophus::SO3 SO3_Q(Q1);
cout << "SO(3) SO3_Q from Quaterion" << SO3_Q << endl << endl;
/****************************************************************************
3.1 使用旋转角(轴角)的各个元素对应的代数值来初始化李群
注意:直接使用旋转角AngleAxis或是旋转角度对应的向量(Vector3d=AngleAxis.axis()*AngleAxis.angle())对李群进行初始化是不行的,因为SO3李群没有对应的构造函数。
也即是使用下列方法是错误的:
Sophus::SO3 SO3_A(A1);//直接使用旋转角对李群初始化
Sophus::SO3 SO3_A(A1.axis()*A1.angle());//直接使用旋转角度对应的向量(Vector3d=AngleAxis.axis()*AngleAxis.angle())对李群进行初始化
只能使用旋转角对应的向量的每一个维度进行赋值,对应于SO3的这样一个构造函数SO3(double rot_x, double rot_y, double rot_z);
*******************************************************************************/
//3.1.1 使用旋转角度对应的向量(Vector3d=AngleAxis.axis()*AngleAxis.angle())中的各个元素对李群进行初始化
Sophus::SO3 SO3_A1((A1.axis() * A1.angle())(0), (A1.axis() * A1.angle())(1), (A1.axis() * A1.angle())(2));
cout << "SO(3) SO3_A1 from AngelAxis1" << SO3_A1 << endl << endl;
//3.1.2 使用旋转角度对应的向量(Vector3d=AngleAxis.axis()*AngleAxis.angle())中的各个元素对李群进行初始化
Sophus::SO3 SO3_A2(M_PI / 2 * 0, M_PI / 2 * 0, M_PI / 2 * 1);
cout << "SO(3) SO3_A2 from AngleAixs2" << SO3_A2 << endl << endl;
//3.2 由于旋转角(轴角)与李代数so(3)对应,所以直接使用旋转角的值获得se(3),进而再通过Sophus::SO3::exp()获得对应的SO(3)
Eigen::Vector3d V1(0, 0, M_PI / 2);//so3在Eigen中用Vector3d表示
Sophus::SO3 SO3_V1 = Sophus::SO3::exp(V1);
cout << "SO(3) SO3_V1 from SO3::exp()" << SO3_V1 << endl << endl;
//二、SO(3)与so(3)的相互转换,以及so3对应的hat和vee操作
Eigen::Vector3d so3_V1 = SO3_V1.log();//so(3)在Sophus(Eigen)中用vector3d表示,使用对数映射获得李群对应的李代数
cout << "so(3) so3_V1 from SO3_V1" << so3_V1.transpose() << endl << endl;
Sophus::SO3 SO3_V2 = Sophus::SO3::exp(so3_V1);//使用指数映射将李代数转化为李群
cout << "SO(3) so3_V2 from so3_V1" <<SO3_V2 << endl << endl;
Eigen::Matrix3d M_so3_V1 = Sophus::SO3::hat(so3_V1);//hat为向量到其对应的反对称矩阵
cout << "so3 hat=\n" << M_so3_V1 << endl << endl;
Eigen::Vector3d V_M = Sophus::SO3::vee(M_so3_V1);//vee为反对称矩阵对应的向量
cout << "so3 vee=\n" << V_M << endl << endl;
//三、增量扰动模型
Eigen::Vector3d update_so3(1e-4,0,0);//假设更新量为这么多
Eigen::Matrix3d update_matrix=Sophus::SO3::exp(update_so3).matrix();//将李群转换为旋转矩阵
cout<<"SO3 update Matrix=\n"<<update_matrix<<endl<<endl;
Sophus::SO3 SO3_updated=Sophus::SO3::exp(update_so3)*SO3_R;
cout<<"SO3 updated = \n"<<SO3_updated<<endl;
Eigen::Matrix3d SO3_updated_matrix=SO3_updated.matrix();//将李群转换为旋转矩阵
cout<<"SO3 updated Matrix = \n"<<SO3_updated_matrix<<endl<<endl;
//******************************************************************分割线***********************************************************************************
cout<<"************************************分割线*************************************************"<<endl<<endl;
Eigen::AngleAxisd A2(M_PI/2,Eigen::Vector3d(0,0,1));
Eigen::Matrix3d R2=A2.matrix();
Eigen::Quaterniond Q2(A2);
Sophus::SO3 SO3_2(R2);
//一、初始化李代数的几种方式
Eigen::Vector3d t(1,0,0);
//1. 使用旋转矩阵和平移向量来初始化SE3
Sophus::SE3 SE_Rt(R2,t);
cout<<"SE3 SE_Rt from Rotation_Matrix and Transform=\n"<<SE_Rt<<endl<<endl;//注意尽管SE(3)是对应一个4*4的矩阵,但是输出SE(3)时是以一个六维向量输出的,其中前前三位为对应的so3,后3维度为实际的平移量t,而不是se3中的平移分量
//2. 使用四元数和平移向量来初始化SE3
Sophus::SE3 SE_Qt(Q2,t);
cout<<"SE3 SE_Qt from Quaterion and Transform=\n"<<SE_Qt<<endl<<endl;
//3. 使用SO3和平移向量来初始化SE3
Sophus::SE3 SE_St(SO3_2,t);
cout<<"SE3 SE_St from SO3 and Transform=\n"<<SE_St<<endl<<endl;
//二、SE(3)与se(3)的相互转换,以及se3对应的hat和vee操作
Sophus::Vector6d se3_Rt=SE_Rt.log();//se(3)在Sophus中用Vector6d表示,使用对数映射获得李群对应的李代数
cout<<"se(3) se3_Rt from SE3_Rt\n"<<se3_Rt<<endl<<endl;//se3输出的是一个六维度向量,其中前3维是平移分量,后3维度是旋转分量
Sophus::SE3 SE3_Rt2=Sophus::SE3::exp(se3_Rt);//使用指数映射将李代数转化为李群
cout<<"SE(3) SO3_Rt2 from se3_Rt"<<SE3_Rt2<<endl<<endl;
Sophus::Matrix4d M_se3_Rt=Sophus::SE3::hat(se3_Rt);
cout<<"se(3) hat=\n"<<M_se3_Rt<<endl<<endl;
Sophus::Vector6d V_M_se3=Sophus::SE3::vee(M_se3_Rt);
cout<<"se(3) vee=\n"<<V_M_se3<<endl<<endl;
//三、增量扰动模型
Sophus::Vector6d update_se3=Sophus::Vector6d::Zero();
update_se3(0)=1e-4d;
cout<<"update_se3\n"<<update_se3.transpose()<<endl<<endl;
Eigen::Matrix4d update_matrix2=Sophus::SE3::exp(update_se3).matrix();//将李群转换为旋转矩阵
cout<<"update matrix=\n"<<update_matrix2<<endl<<endl;
Sophus::SE3 SE3_updated=Sophus::SE3::exp(update_se3)*SE3_Rt2;
cout<<"SE3 updated=\n"<<SE3_updated<<endl<<endl;
Eigen::Matrix4d SE3_updated_matrix=SE3_updated.matrix();//将李群转换为旋转矩阵
cout<<"SE3 updated Matrix=\n"<<SE3_updated_matrix<<endl<<endl;
return 0;
}
上述代码对应的CMakeLists.txt为:
CMAKE_MINIMUM_REQUIRED( VERSION 2.8)
PROJECT(useSophus)
FIND_PACKAGE(Sophus REQUIRED)
INCLUDE_DIRECTORIES(${Sophus_INCLUDE_DIRS})
add_executable(useSophus useSophus.cpp)
TARGET_LINK_LIBRARIES(useSophus ${Sophus_LIBRARIES})
本系列文章为原创,转载请注明出处。
作者:Dongdong Bai
邮箱: baidongdong@nudt.edu
若您觉得本博文对您有帮助,请您为我点赞并关注我,以鼓励我写出更优秀的博文。谢谢!