参考:串口的结构体 重定向printf串口发送stm32等博文
作者:点灯小哥
发布时间: 2021-03-06 21:46:33
网址:https://blog.csdn.net/weixin_46016743/article/details/114458698
串口相关知识
定义
串口通讯(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,因此大部分电子设备都支持该通讯方式,其通讯协议可分层为协议层和物理层。
- 物理层规定通信协议中具有机械、电子功能的特性,从而确保原始数据在物理媒体的传播
- 协议层主要规定通讯逻辑,统一双方的数据打包、解包标准。通俗的讲物理层规定我们用嘴巴还是肢体交流,协议层规定我们用中文还是英文交流。
通信概念
1.通讯结构
串口通讯的物理层的主要标准是RS-232标准,其规定了信号的用途、通讯接口及信号的电平标准,其通讯结构如下:
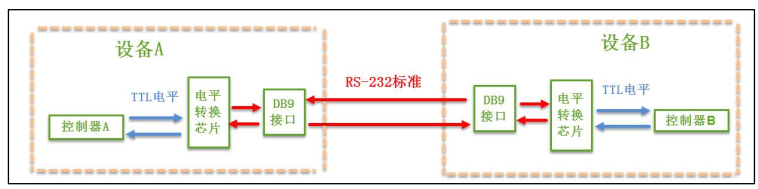
在设备内部信号是以TTL电平标准传输的,设备之间是通过RS-232电平标准传输的,而且TTL电平需要经过电平转换芯片才能转化为RS-232电平,RS-232电平转TTL电平也是如此。
2.电平标准
根据使用的电平标准不同,串口通讯可分为 RS-232标准及TTL标准,具体标准如下:

在电子电路中常使用TTL的电平标准,但其抗干扰能力较弱,为了增加串口的通讯距离及抗干扰能力,使用RS-232电平标准在设备之间传输信息,经常使用MAX232芯片对TTL电平及RS-232电平进行相互转换。
3.同步异步传输方式(USART与UART)
- A同步:
传输以数据块为核心,在一个数据块内,字符间无间隔,接受发送同步,有sclk时钟,双方sclk(串行时钟)连在一起,提供同步
特点:效率高,无间隔
- B异步:
以字符为传输单位,每发一个字符,都得发送一个起始位,(告诉对方我开始发了)结束发送停止位。(我发完了)
特点:效率低,间隔任意


USART 在 STM32 应用最多莫过于“打印”程序信息,一般在硬件设计时都会预留一USART 通信接口连接电脑,用于在调试程序是可以把一些调试信息“打印”在电脑端的串口调试助手工具上,从而了解程序运行是否正确、如果出错哪具体哪里出错等等。
4.串口数据包组成


起始位、数据位(8位或者9位)、奇偶校验位(第9位)、起始停止位(1,15,2位)、波特率设置
校验方式 :
奇偶校验需要一位校验位,即使用串口通信的方式2或方式3(8位数据位+1位校验位)。
奇校验(odd parity):让传输的数据(包含校验位)中1的个数为奇数。
即:如果传输字节中1的个数是偶数(不包含校验位),则校验位为“1”,奇数相反。
5.速率类型
比特(bit):每秒传输的二进制位
波特(byte):每秒传输的码源个数(串口常用),一个二进制位表示一个码源(0V——0;3.3V——1)
注:这俩本质上其实是一样的
6.通信类型(串行、并行)
- 串行:一个一个传输 如:fsmc
- 特点:占用资源多,速度慢,看干扰强
- 并行:多个一起传输 如:spi usart
- 特点:占用资源少,速度快。抗干扰能力弱,距离近
7.通信方式(单工、半双工、全双工)

-
单工:数据传输只支持数据在一个方向上传输;如:打印机
-
半双工:允许数据在两个方向上传输。但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信;它不需要独立的接收端和发送端,两者可以合并一起使用一个端口。如:对讲机,spi
-
全双工:允许数据同时在两个方向上传输。因此,全双工通信是两个单工通信方式的结合,需要独立的接收端和发送端。如:spi,usart
8.概念补充
-
1.数据包
串口通讯的数据包由发送设备通过自身的TXD接口传输到接收设备得RXD接口,在协议层中规定了数据包的内容,具体包括起始位、主体数据(8位或9位)、校验位以及停止位,通讯的双方必须将数据包的格式约定一致才能正常收发数据。
-
2.波特率
由于异步通信中没有时钟信号,所以接收双方要约定好波特率,即每秒传输的码元个数,以便对信号进行解码,常见的波特率有4800、9600、115200等。STM32中波特率的设置通过串口初始化结构体来实现。
-
3.起始和停止信号
数据包的首尾分别是起始位和停止位,数据包的起始信号由一个逻辑0的数据位表示,停止位信号可由0.5、1、1.5、2个逻辑1的数据位表示,双方需约定一致。STM32中起始和停止信号的设置也是通过串口初始化结构体来实现。
-
4.有效数据
有效数据规定了主题数据的长度,一般为8或9位,其在STM32中也是通过串口初始化结构体来实现的。
-
5.数据校验
在有效数据之后,有一个可选的数据校验位。由于数据通信相对更容易受到外部干扰导致传输数据出现偏差,可以在传输过程加上校验位来解决这个问题。校验方法有奇校验(odd)、偶校验(even)、 0 校验(space)、 1 校验(mark)以及无(noparity)。这些也都可以在串口初始化结构体中实现的。

串口的引脚

下面是最小板原理图,UART4和UART5并没有引出来。
结构体





库函数(状态标志位)


串口标志位,用于说明串口发送接收状态,是否都发/收完了


串口的发送配置

串口发送字符(STM32发送到上位机)
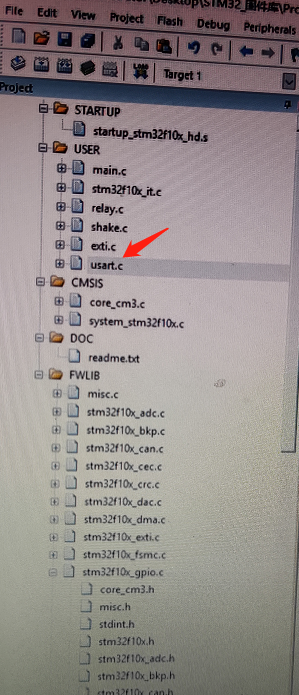
新建一个usart文件夹,里面新建usart.c和usart.h两个文件,将usart.c添加到工程里面(user一栏下),编译一下usart.h会自动添加进工程。
usart.h
#include "stm32f10x.h"
void Usart_Init(void);
usart.c
#include "stm32f10x.h" // Device header
#include "usart.h"
void Usart_Init(void)
{
//2. 配置GPIO的结构体
GPIO_InitTypeDef GpioInitStructure; //初始化GPIO结构体命名
//3. 配置USART的结构体(另外一个结构体是带时钟的串口)
USART_InitTypeDef UsartInitStructure;//初始化USART结构体命名
//1. 时钟使能: GPIOA的时钟,引脚复用(成串口)的时钟,串口的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);//开启APB2总线复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//2.1 配置PA9 TX(输出)
GpioInitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出(因为复用成串口)
GpioInitStructure.GPIO_Pin = GPIO_Pin_9;
GpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;//任意选择,影响不大
GPIO_Init(GPIOA,&GpioInitStructure);
//2.2 配置PA10 RX(接收)
GpioInitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GpioInitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&GpioInitStructure);
//3.配置串口结构体 这是不带时钟的结构体 还有一个是带时钟的结构体
UsartInitStructure.USART_BaudRate = 115200; //波特率
UsartInitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流(没有使用)
UsartInitStructure.USART_Mode = USART_Mode_Rx| USART_Mode_Tx;//模式(输入输出都选择)
UsartInitStructure.USART_Parity = USART_Parity_No; //校验位(不用)
UsartInitStructure.USART_StopBits = USART_StopBits_1; //停止位(1位)
UsartInitStructure.USART_WordLength = USART_WordLength_8b;//有效字节长度(8位)
//串口1
USART_Init(USART1, &UsartInitStructure);
USART_Cmd(USART1, ENABLE);//打开串口 比配置GPIO多这一步
}
main.c
#include "stm32f10x.h"
#include "usart.h"//头文件是单独创建的文件 main函数找不到 要去手工添加路径(点击魔术棒...)
void delay(uint16_t time)
{
uint16_t i = 0;
while(time--)
{
i=12000;
while(i--);
}
}
int main(void)
{
Usart_Init();
while(1)
{
USART_SendData(USART1, 'O'); //发送一个字符
//数据寄存器空标志位 RESET状态说明上面字符发送成功了!
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //USART_GetFlagStatus是判断标志位
USART_SendData(USART1, 'K');
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, '\n');
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET); //右键USART_GetFlagStatus去goto找到RESET
delay(1000);
}
}

串口发送字符串
上一节串口只能一个一个发送字符,可以自己写一个串口发送字符串函数,然后main函数调用即可。
usart.c
//发送字符函数 (自己定义的 注意形参要和固件库里面串口发送字符的形参要一样)
//调用这个函数不用每次都去判断标志位
void USARTSendByte(USART_TypeDef* USARTx, uint16_t Data)//main函数调用这个函数的方法:USARTSendByte(USART1, 'A');
{
USART_SendData( USARTx, Data);//固件库本身的串口发送函数
//判断数据寄存器是否为空 字符标志位
while( USART_GetFlagStatus( USARTx, USART_FLAG_TXE) == RESET);//USART_GetFlagStatus是判断标志位 USART_FLAG_TXE 去usart.h FLAG找
}
//发送字符串函数(自己定义的)
void USARTSendString( USART_TypeDef* USARTx, char *str)
{
uint16_t i = 0;
do{
USARTSendByte(USART1,*(str+i));
i++;
}while(*(str+i) != '\0');//字符串结束标识
//字符串标志位 上面是字符标志位
while( USART_GetFlagStatus( USARTx, USART_FLAG_TC) == RESET);//USART_GetFlagStatus是判断标志位 USART_FLAG_TC(这是判断字符串) 去usart.h FLAG找
}
//main函数里这样调用
USARTSendByte( USART1, 'O');
USARTSendByte( USART1, 'K');
USARTSendString( USART1, "你好STM32");
重定向printf串口发送
在C语言标准库中,printf()拥有十分强大的输出能力,可以输出各种类型的数据,整型、浮点型、8进制、16进制、换行符,缩进符等等。
printf()是把数据输出到屏幕,但是ARM芯片中没有屏幕,我们设想将printf()打印到串口,这样我们就可以通过printf()和串口实时的观察ARM芯片内部的工作情况,运行结果。
先来认识一个关键字:__weak
weak的字面意思就是“微弱”的意思,其主要作用就是可以重新定义重名函数或变量而编译时不报错。笔者最开始注意到这个关键字是在使用 STM32 HAL 库的时候注意到的,比如这张图片所示:

在上图我们可以看到左边的 HAL_MspInit 函数前面用 __weak 进行修饰,而图片右边又定义了 HAL_MspInit函数,这时整个工程就定义了两个 HAL_MspInit 函数,声明可以有多个,但是定义只能存在一个,因为 __weak的存在,所以不会报错,并且真正起作用的函数是没有用 __weak 修饰的函数。
printf函数其实就是调用了fputc,我们来重写fputc达到重定向printf的目的。

实现过程:在usart.c 的后面增加两个函数
usart.c
int fputc(int ch, FILE *f)//(串口发送)重写fputc,供printf调用
{
USARTSendByte( USART1, (uint8_t)ch);
while( USART_GetFlagStatus( USART1, USART_FLAG_TXE) == RESET);
return (ch);
}
int fgetc(FILE *f)//(串口接收)重写fgetc
{ //标志位选择接收
while( USART_GetFlagStatus( USART1, USART_FLAG_RXNE) == RESET);
return (int) USART_ReceiveData(USART1);
}
usart.h
#include "stm32f10x.h"
#include <stdio.h>//标准输入输出printf
void Usart_Init(void);
void USARTSendByte(USART_TypeDef* USARTx, uint16_t Data);
void USARTSendString( USART_TypeDef* USARTx, char *str);
int fputc(int ch, FILE *f);
注意:在使用printf等C语言标准库函数要包含头文件stdio.h,并且勾选Target中的use MicroLIB使用标准库。

main.c
#include "stm32f10x.h" // Device header
#include "usart.h"
void delay(uint16_t time)
{
uint16_t i = 0;
while(time--)
{
i=12000;
while(i--);
}
}
int main(void)
{
Usart_Init();
printf("你好STM32");//printf调用重写的fputc 这样单片机就可以通过串口发送字符串"你好STM32"
putchar('X'); //putchar调用重写的fputc 这样单片机就可以通过串口发送字符'X'
while(1)
{
}
}
串口的中断接收(控制灯)
参考:串口 stm32 实现中断接收 打开板子上的led灯
作者:点灯小哥
发布时间: 2021-03-07 11:55:35
网址:https://blog.csdn.net/weixin_46016743/article/details/114481125
注:板子上的LED灯看电路图连接的是PC13引脚,前面博文led.c文件里配置好了。
方法:在usart.c上增加配置NVIC中断控制器,中断源为串口1
串口中断不属于EXTI外部中断,所以不用配置EXTI结构体
NVIC_InitTypeDef Nvic_init; //misc.h
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //配置NVIC中断组
//3.配置NVIC中断控制器 中断源(通道)选择串口1
Nvic_init.NVIC_IRQChannel = USART1_IRQn;
Nvic_init.NVIC_IRQChannelCmd = ENABLE; //使能 找到FunctionalState字眼 右键goto
Nvic_init.NVIC_IRQChannelPreemptionPriority = 1; //因为只配置了一个中断 不考虑优先级 所以只有1个
Nvic_init.NVIC_IRQChannelSubPriority = 1;//抢占优先级与子优先级
NVIC_Init(&NvicInitStructure);
usart.c
#include "stm32f10x.h" // Device header
#include "usart.h"
//#include "stdio.h"
void Usart_Init(void)
{
//2. 配置GPIO的结构体
GPIO_InitTypeDef GpioInitStructure; //初始化GPIO结构体命名
USART_InitTypeDef UsartInitStructure;//初始化USART结构体命名
NVIC_InitTypeDef NvicInitStructure; //加入NVIC
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//配置NVIC中断分组 目前一个中断随便配置就好了
//1. 配置时钟:GPIO的时钟,引脚复用的时钟,串口的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
//2.1 配置PA9 TX
GpioInitStructure.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
GpioInitStructure.GPIO_Pin = GPIO_Pin_9;
GpioInitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GpioInitStructure);
//2.2 配置PA10 RX
GpioInitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GpioInitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&GpioInitStructure);
//3.配置串口结构体
UsartInitStructure.USART_BaudRate = 115200; //波特率
UsartInitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //硬件流
UsartInitStructure.USART_Mode = USART_Mode_Rx| USART_Mode_Tx; //模式
UsartInitStructure.USART_Parity = USART_Parity_No; //校验位
UsartInitStructure.USART_StopBits = USART_StopBits_1; //停止位
UsartInitStructure.USART_WordLength = USART_WordLength_8b; //字节长度
USART_Init(USART1, &UsartInitStructure);
//串口中断配置函数 //接收数据寄存器非空标志位 作为串口发生中断的标志
USART_ITConfig( USART1, USART_IT_RXNE, ENABLE );
USART_Cmd(USART1, ENABLE);//打开串口 比配置GPIO多这一步
//配置NVIC中断控制器 中断源(通道)选择串口1
NvicInitStructure.NVIC_IRQChannel = USART1_IRQn;
NvicInitStructure.NVIC_IRQChannelPreemptionPriority = 1;//抢占优先级
NvicInitStructure.NVIC_IRQChannelSubPriority = 1;//子优先级
NvicInitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NvicInitStructure);
}
//发送字符
void USARTSendByte(USART_TypeDef* USARTx, uint16_t Data)
{
USART_SendData( USARTx, Data);
while( USART_GetFlagStatus( USARTx, USART_FLAG_TXE) == RESET);//USART_GetFlagStatus是判断标志位 USART_FLAG_TXE 去usart.h FLAG找
}
//发送字符串
void USARTSendString( USART_TypeDef* USARTx, char *str)
{
uint16_t i = 0;
do{
USARTSendByte(USART1,*(str+i));
i++;
}while(*(str+i) != '\0');
while( USART_GetFlagStatus( USARTx, USART_FLAG_TC) == RESET);//USART_GetFlagStatus是判断标志位 USART_FLAG_TC(这是判断字符串) 去usart.h FLAG找
}
main.c – USART1_IRQHandler(void)
#include "stm32f10x.h" // Device header
#include "usart.h"
#include "led.h"
#include "exti.h"
void delay(uint16_t time)
{
uint16_t i = 0;
while(time--)
{
i=12000;
while(i--);
}
}
int main(void)
{
Usart_Init();
LED_Init();
GPIO_SetBits( GPIOC, GPIO_Pin_13);//初始化C13电平为高电平 灯不亮
while(1)
{
}
}
//4. 中断服务函数(在启动头文件里 有weak标志 属于重定向函数)
void USART1_IRQHandler(void)
{
char temp;
//获得串口中断标志位 接收数据寄存器非空标志位
if( USART_GetITStatus( USART1, USART_IT_RXNE) != RESET) //发生了中断 开始接收数据
{
temp = USART_ReceiveData( USART1);
if(temp == 'O')
{
GPIO_ResetBits( GPIOC, GPIO_Pin_13);//串口助手发送过来字符'O' 开灯
USARTSendString( USART1, "LED IS OK");//调用自己写的串口发送字符串函数
}
if(temp == 'C')
{
GPIO_SetBits( GPIOC, GPIO_Pin_13);//关灯
USARTSendString( USART1, "LED IS DOWN");
}
}
}

串口接收不定长数据
STM32串口USART1接收字符串
串口接收不定长数据的几种方式
STM32串口接收一帧数据方法(处理一帧数据中所需内容)
STM32单片机串口空闲中断接收不定长数据
STM32CubeMX系列04——串口(查询、中断、DMA、不定长接收、重定向)