
今天我们来学习制作智能循迹小车
那么什么是智能小车呢?
智能小车作为现代的新发明,是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。智能小车能够实时显示时间、速度、里程,具有自动寻迹、寻光、避障功能,可程控行驶速度、准确定位停车,远程传输图像等功能。


我们本次智能小车制作
主要是让小车实现根据黑线的路径进行循迹的功能
(避障功能可自由完成)
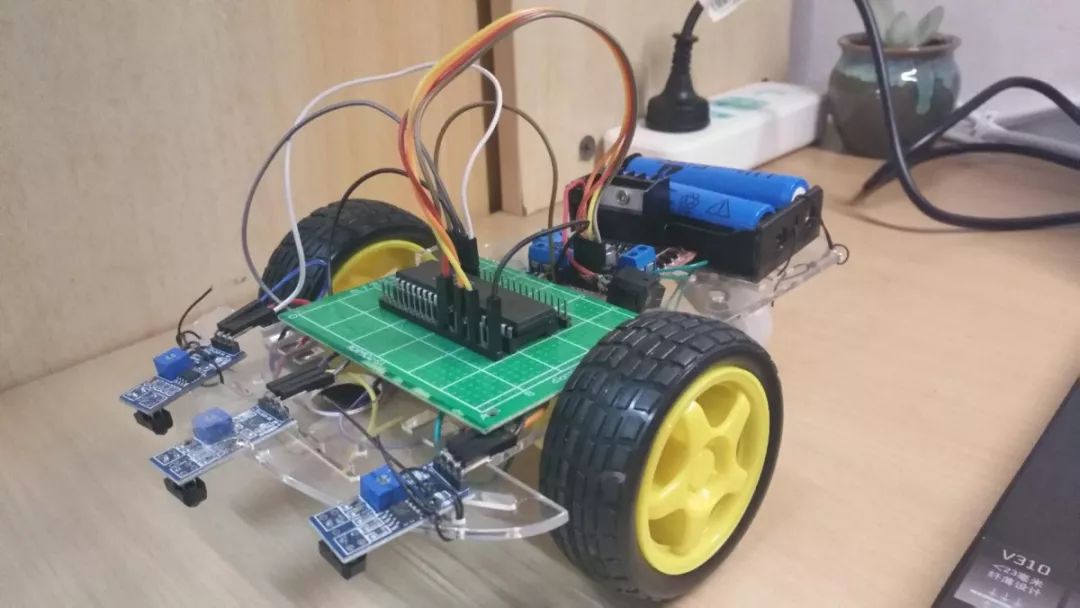
智能小车可以分成三个部分——传感器部分、控制器部分、执行器部分
• 控制器部分:接收传感器部分传递过来的信号,并根据事前写入的决策系统(软件程序),来决定机器人对外部信号的反应,将控制信号发给执行器部分。好比人的大脑。
• 执行器部分:驱动机器人做出各种行为,包括发出各种信号(点亮发光二极管、发出声音)的部分,并且可以根据控制器部分的信号调整自己的状态。对机器人小车来说,最基本的就是轮子。这部分就好比人的四肢一样。
• 传感器部分:机器人用来读取各种外部信号的传感器,以及控制机器人行动的各种开关。好比人的眼睛、耳朵等感觉器官。
一智能循迹小车简介 ❂ 小车工作原理
本系统采用较为简单的设计方案,通过红外传感器循迹模块判断黑线的路径,然后由80C51单片机通过IO口控制L298N电机驱动模块改变两个直流电机的工作状态,最后实现