
一、概述
这篇文章主要记录在 Ubuntu18.04 安装海思SS626整个SDK的全过程,以及编译过程中遇到的问题。
编译环境:
Win10 + VMware17Pro + Ubuntu 18.04 LTS
VMware17Pro的安装可以参考:windows安装VMware最新版本(VMware Workstation 17.0 Pro)详细教程
Ubuntu 18.04 LTS 是前几天刚安装的新系统,只装了几个软件Vim、samba、ssh,这样可以避免之前安装过的软件包在无意中解决了此次编译的问题i。其安装过程记录在:【海思SS626 | 开发环境】VMware17安装Ubuntu 18.04.6
重要说明:
编译所有的海思SDK之前,要留意海思SDK中关于开发环境的几个文档,不要拿到SDK就直接按照readme去编译。SDK文档会需要按照哪些库,这样可以避免编译过程中出现不必要的错误。
编译SDK需要阅读的文档路径:
SS626ReleaseDoc\zh\01.software\board\OSDRV\SS626V100 开发环境用户指南.pdf;
SS626ReleaseDoc\zh\01.software\board\OSDRV\Huawei LiteOS 开发指南.pdf

二、安装交叉编译工具
只要是SS626的开发主机,无论你是否需要编译SDK,都需要安装交叉编译工具,这节记录SS626的两个交叉编译工具的安装过程:
✨2.1 安装 aarch64-mix410-linux.tgz
tar -zxf aarch64-mix410-linux.tgz
cd aarch64-mix410-linux/
chmod +x aarch64-mix410-linux.install
sudo ./aarch64-mix410-linux.install
source /etc/profile
✨2.2 安装 cc-riscv32-cfg11-musl-20220523-elf.tar.gz
tar -zxf cc-riscv32-cfg11-musl-20220523-elf.tar.gz
cd cc-riscv32-cfg11-musl-20220523-elf/
sudo ./install.sh
cd cc-riscv32-cfg11-musl-20220523-elf/bin
echo "export PATH=$(pwd):\${PATH}" >> $HOME/.profile
source ~/.profile
✨2.3 检查工具链版本,打印版本则表示安装成功
aarch64-mix410-linux-gcc -v
riscv32-cfg11-musl-20220523-elf-gcc -v

三、安装软件包
本文的操作系统是Ubuntu18.04LTS的,这个是为了与SS626的开发包编译系统保持一致而重新安装的系统,基本没安装过其他软件。下面根据《SS626V100 开发环境用户指南.pdf》进行安装必要的软件包。

✨3.1 安装软件包
这里的软件包有点多,我也没去试哪些不需要装,反正总共就400多M,建议按照文档全部安装,避免编译过程中遇到问题:

sudo apt-get install make libc6-i386 lib32z1 lib32stdc++6 zlib1g-dev libncurses5-dev ncurses-term libncursesw5-dev g++ u-boot-tools texinfo texlive gawk libssl-dev openssl bc p7zip-full gperf bison flex diffutils git unzip libtool autopoint gettext po4a
✨3.2 安装mtd-utils的依赖库
mtd-utils依赖以下几个库,以ubuntu为例,安装方式请参考下面命令:
sudo apt-get install zlib1g-dev liblzo2-dev uuid-dev pkg-config automake
✨3.3 安装pip和kconfiglib
LiteOS 编译需要安装的工具包括python、 pip和kconfiglib,python在Ubuntu18.04系统已经默认安装了 python2.7 和 python3.6,符合编译要求,下面只安装pip和kconfiglib,如果你的系统没有python,则需要到 python3.8 官网根据文档安装。
unzip setuptools-50.3.2.zip
cd setuptools-50.3.2/
python3 setup.py install
tar zxf pip-20.2.4.tar.gz
cd pip-20.2.4/
sudo python3 setup.py install
sudo pip install kconfiglib
注意:
setuptools最新版本不支持python 2.7,如果使用python 2.7,请下载setuptools 45.0.0版本以支持python 2.7。
前面都是使用python3去安装的,所以需要将 /usr/bin/python 软链接指向python3.6 避免编译出错,参考下面命令修改:
$ ls /usr/bin/python -l
lrwxrwxrwx 1 root root 9 4月 16 2018 /usr/bin/python -> python2.7
$ cd /usr/bin
$ sudo rm python
$ sudo ln -s python3.6 python
$ ls /usr/bin/python -l
lrwxrwxrwx 1 root root 9 9月 13 20:14 /usr/bin/python -> python3.6
✨3.4 其他配置
- 配置默认使用bash
执行sudo dpkg-reconfigure dash 选择no。避免遇到错误:
/bin/sh: 1: pushd: not found
/bin/sh: 1: popd: not found
- 创建
/etc/ld.so.preload 文件,并执行echo "" > /etc/ld.so.preload,以解决64bit linuxserver上某些第三方库编译失败的问题。

四、解压SDK,打补丁
2.1 解压 SS626V100R001C02SPC010.rar,在Windows解压也可以;
2.2 解压后,有三个目录:00.hardware、01.software、02.only for reference

2.3 打补丁,将ot开头的API函数转换成hi开头:
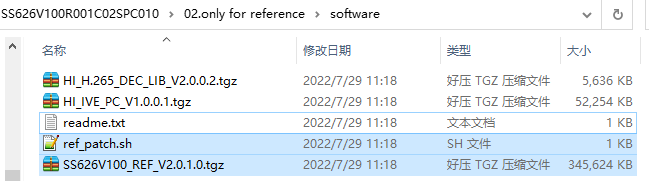
- 将
SS626V100R001C02SPC010\02.only for reference\software目录下的 ref_patch.sh 和 SS626V100_REF_V2.0.1.0.tgz 复制到 SS626V100R001C02SPC010目录,readme.txt 是使用说明;
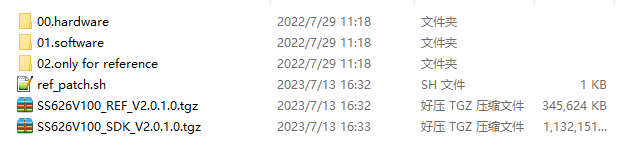
- 将
SS626V100R001C02SPC010\01.software\board\SS626V100_SDK_V2.0.1.0.tgz 复制到 SS626V100R001C02SPC010,复制后SS626V100R001C02SPC010目录如下:
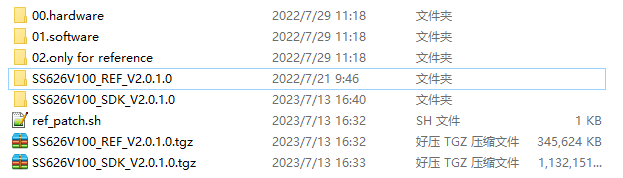
- 解压
SS626V100_SDK_V2.0.1.0.tgz,并进去执行 sdk.unpack,执行后回到SS626V100R001C02SPC010目录;
- 解压
SS626V100_REF_V2.0.1.0.tgz ,执行 ref_patch.sh。
操作步骤代码如下:
# 1. 复制 ref_patch.sh 和 SS626V100_REF_V2.0.1.0.tgz
$ cp 02.only\ for\ reference/software/ref_patch.sh ./
$ cp 02.only\ for\ reference/software/SS626V100_REF_V2.0.1.0.tgz ./
# 2. 复制 SS626V100_SDK_V2.0.1.0.tgz
$ cp 01.software/board/SS626V100_SDK_V2.0.1.0.tgz ./
# 3.解压 SS626V100_SDK_V2.0.1.0.tgz 并进去执行 sdk.unpack
$ tar zxf SS626V100_SDK_V2.0.1.0.tgz
$ cd SS626V100_SDK_V2.0.1.0/
$ ./sdk.unpack
$ cd ..
# 4.解压 SS626V100_REF_V2.0.1.0.tgz ,执行 ref_patch.sh
$ tar zxf SS626V100_REF_V2.0.1.0.tgz
$ chmod +x ref_patch.sh
$ ./ref_patch.sh
完成上面步骤后,SS626V100R001C02SPC010\SS626V100_SDK_V2.0.1.0就是以hi开头的API的SDK了。例程代码在SS626V100R001C02SPC010\SS626V100_SDK_V2.0.1.0\amp\a55_linux\mpp\sample; u-boot、内核源码在SS626V100R001C02SPC010\SS626V100_SDK_V2.0.1.0\open_source。

五、编译整个SDK,及问题解决
经过前面的准备工作后,可以开始编译整个SDK包了,而且现在基本不会出现什么问题了,下面的错误汇总是没装软件包前的错误。编译前仔细阅读SS626V100_SDK_V2.0.1.0/osdrv/readme.txt文件,我编译得是emmc的,参考下面命令编译:
cd SS626V100_SDK_V2.0.1.0/osdrv/
make BOOT_MEDIA=emmc CHIP=ss626v100 all
也可以使用下面命令记录编译时长到maketime文件:
date > maketime; make BOOT_MEDIA=emmc CHIP=ss626v100 all; date >> maketime
✨5.1 错误1:/bin/sh: 1: pushd: not found
错误:
pushd /home/samba/sdk/00_SS626SDK/SS626V100_SDK_V2.0.1.0/open_source/u-boot;tar xf u-boot-2020.01.tar.gz -C .;popd
/bin/sh: 1: pushd: not found
/bin/sh: 1: popd: not found
原因:
从Ubuntu 6.10开始,默认使用dash(theDebian Almquist Shell)而不是bash(the GNUBourne-Again Shell),但Login Shell还是bash,原因是dash更快、更高效,而且它符合POSIX规范,Ubuntu在启动的时候会运行很多shell脚本,使用dash可以加快启动速度。
通过命令 ll /bin/sh 确实可以看出来用的是dash。
解决:
sudo dpkg-reconfigure dash #选择no
✨5.2 错误2:ImportError: No module named kconfiglib
编译liteos时,报错:
ImportError: No module named kconfiglib
build/menuconfig/Makefile.kconfig:11: recipe for target 'savemenuconfig' failed
make[1]: *** [savemenuconfig] Error 1
原因:
没有 kconfiglib 模块,(No module named kconfiglib),可能pip没装好,可能kconfiglib 装在python3.6,而使用python2.7去编译,
解决:安装对应模块
pip install kconfiglib
安装时,又提示3.6已经安装该模块,打印如下,继续编译liteos仍然报错;
$ pip install kconfiglib
Defaulting to user installation because normal site-packages is not writeable
Requirement already satisfied: kconfiglib in /usr/local/lib/python3.6/dist-packages (14.1.0)
查看python:ls /usr/bin/python -l,是python2.7,参考下面命令改为指向python3.6
$ ls /usr/bin/python -l
lrwxrwxrwx 1 root root 9 4月 16 2018 /usr/bin/python -> python2.7
$ cd /usr/bin/
$ sudo rm python
$ sudo ln -s python3.6 python
$ ls /usr/bin/python -l
lrwxrwxrwx 1 root root 9 9月 13 20:14 /usr/bin/python -> python3.6
✨5.3 错误3:The autopoint command is part of the GNU gettext package
编译 util-linux-2.37.1 时,`报错``:
$ ./autogen.sh
You must have autopoint installed to generate the util-linux build system.
The autopoint command is part of the GNU gettext package.
解决,安装 autopoint:
$ sudo apt install autopoint
✨5.4 错误4:The program ‘po4a’ was not found.
编译 xz 时,报错:
The program 'po4a' was not found.
解决,安装 po4a:
$ sudo apt install po4a

文章未经许可,不许转发
第一次编译时,报错很多,而且每次都要重新编译很久,所以就放弃编译整个sdk了,过了两周后,找个周末的时间,重新安装一个纯净的Ubuntu18.04,特地重新编译一次,用了一个周末的时间,终于可以完整编过。又用了四个小时记录于此博客。
记录于2023-09-15 23:11:17,有错误的地方欢迎指正。
如果文章有帮助的话,点赞
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)