前言

「作者主页」:雪碧有白泡泡
「个人网站」:雪碧的个人网站
「推荐专栏」:
★java一站式服务 ★
★ React从入门到精通★
★前端炫酷代码分享 ★
★ 从0到英雄,vue成神之路★
★ uniapp-从构建到提升★
★ 从0到英雄,vue成神之路★
★ 解决算法,一个专栏就够了★
★ 架构咱们从0说★
★ 数据流通的精妙之道★
★后端进阶之路★

思维导图概述
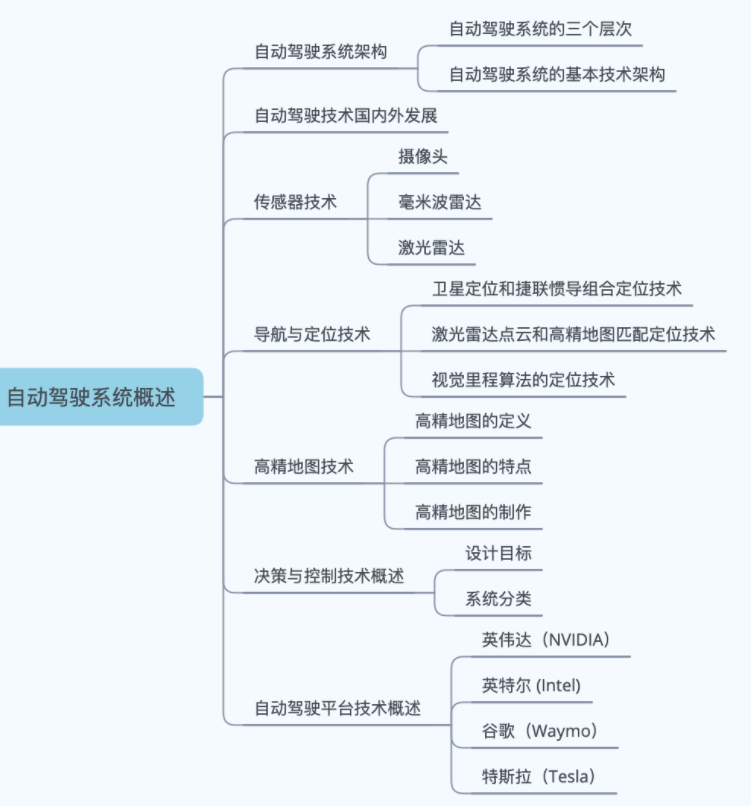
自动驾驶系统架构
自动驾驶系统的三个层次
自动驾驶系统的架构主要包括三个层次:感知层、决策层和控制层。
感知层是自动驾驶系统中最基本的层次,负责实时感知车辆周围的环境和道路信息。该层次主要由传感器组成,如相机、激光雷达、毫米波雷达等。通过这些传感器获取的数据,可以用于识别和追踪其他车辆、行人、交通标志、道路边缘等。
决策层是自动驾驶系统中的中间层次,主要负责根据感知层获取的数据做出决策。决策层可以根据当前的道路情况和交通规则,判断车辆应该采取的行为,例如加速、刹车、转向等。该层次通常由算法和人工智能技术组成,如机器学习、深度学习等。
控制层是自动驾驶系统中的最高层次,负责将决策层生成的控制命令转化为实际的车辆动作。控制层通常由电子控制单元(ECU)和执行器组成,如马达、刹车器、转向器等。该层次可以通过控制车辆的加速度、制动力和转向角度等来驱动车辆。

自动驾驶系统的基本技术架构
自动驾驶系统的基本技术架构包括以下几个方面:
-
传感器技术:包括相机、雷达、激光雷达等传感器技术,用于感知车辆周围的环境和道路信息。
-
数据处理与算法:利用机器学习、深度学习等算法对传感器获取的数据进行处理和分析,用于识别和追踪其他车辆、行人、交通标志等。
-
地图与定位技术:利用卫星定位系统(如GPS)和地图数据,对车辆的位置和姿态进行精确定位,以及提供实时的地图信息。
-
决策与规划技术:根据感知数据和地图信息,对车辆当前的道路情况进行分析和决策,生成相应的驾驶策略和行驶轨迹。
-
控制与执行技术:将决策层生成的控制命令传递给车辆的执行器,以实时控制车辆的加速度、制动力和转向角度等。
-
可视化与用户界面:为驾驶员或乘客提供直观的信息界面,向其展示车辆状态、路况信息等,以及与自动驾驶系统进行交互。

自动驾驶技术国内外发展
自动驾驶技术在国内外的发展可谓日新月异。在国内,随着政府对自动驾驶技术的支持和推动,国内企业在该领域取得了显著进展。例如,百度的Apollo平台已经开放了完整的自动驾驶技术栈,吸引了众多合作伙伴加入。此外,腾讯、阿里巴巴等互联网巨头也投资了自动驾驶技术的研发。国内的车企也在积极开展自动驾驶技术的研究和应用,例如特斯拉在中国推出了自动驾驶功能。
在国外,美国是自动驾驶技术最为发达的国家之一。特斯拉是美国自动驾驶技术的领军企业,其在自动驾驶方面拥有先进的技术和大量实际驾驶数据。另外,Uber也在美国积极推进自动驾驶技术的应用,并在一些城市进行自动驾驶试点项目。谷歌旗下的Waymo公司在自动驾驶技术领域积累了丰富的经验,并计划在更多城市开展自动驾驶出租车服务。

传感器技术
自动驾驶系统中使用的传感器包括摄像头、毫米波雷达和激光雷达。这些传感器用于实时感知车辆周围的环境,并提供准确的信息以支持自动驾驶决策和控制。
摄像头
- 摄像头:摄像头是自动驾驶系统中最常用的传感器之一。它可以捕捉到车辆周围的图像,并通过计算机视觉算法来识别和跟踪道路标志、车辆、行人等。以下是一个基于OpenCV库的Python代码示例,用于捕捉图像并显示在窗口中:
import cv2
# 打开摄像头
cap = cv2.VideoCapture(0)
while True:
# 读取帧
ret, frame = cap.read()
# 显示帧
cv2.imshow('Camera', frame)
# 检测按键
if cv2.waitKey(1) == ord('q'):
break
# 释放摄像头资源
cap.release()
# 关闭窗口
cv2.destroyAllWindows()
毫米波雷达
- 毫米波雷达:毫米波雷达是一种主动式传感器,它利用高频率的电磁波来感知车辆周围的物体。毫米波雷达可以提供物体的距离、速度和角度等信息,对于障碍物检测和跟踪非常重要。以下是一个基于ROS(机器人操作系统)框架的C++代码示例,用于使用毫米波雷达接收和处理数据:
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
void mmWaveRadarCallback(const sensor_msgs::PointCloud2::ConstPtr& msg)
{
// 处理雷达数据
// ...
ROS_INFO("Received mmWave Radar data");
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "mmWave_radar");
// 创建ROS节点句柄
ros::NodeHandle nh;
// 创建订阅者,并指定回调函数
ros::Subscriber sub = nh.subscribe("/mmWave_radar_data", 10, mmWaveRadarCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
激光雷达
- 激光雷达:激光雷达是一种被动式传感器,通过发送激光束并测量其反射信号的时间来感知车辆周围的物体。激光雷达可以提供高精度的距离和角度信息,广泛用于地图构建、障碍物检测和定位。以下是一个基于ROS框架的C++代码示例,用于使用激光雷达接收和处理数据:
#include <ros/ros.h>
#include <sensor_msgs/LaserScan.h>
void laserScanCallback(const sensor_msgs::LaserScan::ConstPtr& msg)
{
// 处理激光雷达数据
// ...
ROS_INFO("Received Laser Scan data");
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "laser_scan");
// 创建ROS节点句柄
ros::NodeHandle nh;
// 创建订阅者,并指定回调函数
ros::Subscriber sub = nh.subscribe("/laser_scan_data", 10, laserScanCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
小结
自动驾驶传感器技术是实现自动驾驶功能的关键技术之一。它能够感知周围环境并获取相关数据,以供自动驾驶系统进行决策和控制。

参与活动领取奖励
报名专属课程,可拉进度条,完成百分之五十以上即可获取自选百度周边
报名链接:加入课程
奖品收获地址:领取周边
