CAN 总线控制器作为
CAN
网络接口,遵循
CAN
总线协议
2.0A
和
2.0B
。
CAN 总线控制器
可以处理总线上的数据收发,非 GD32130x CL
系列产品中,具有
14
个过滤器,在
GD32F10xCL 系列产品中,
CAN
具有
28
个过滤器,过滤器用于筛选并接收用户需要的消息。用户可以通过 3
个发送邮箱将待发送数据传输至总线,邮箱发送的顺序由发送调度器决定。并通过
2
个深度为 3
的接收
FIFO
获取总线上的数据,接收
FIFO
的管理完全由硬件控制。同时
CAN
总线控制器硬件支持时间触发通信(Time-trigger communication
)功能。
2.GD32的CAN外设介绍
MCU:GD32F103VET6
2.1 CAN初始化结构体
API:ErrStatus can_init(uint32_t can_periph, can_parameter_struct* can_parameter_init)
can_periph:CANx(x=0,1), CAN1 仅适用于 GD32F10x_CL
can_parameter_struct:初始化结构体
ErrStatus: SUCCESS or ERROR
/* CAN initiliaze parameters structure */
typedef struct
{
uint8_t working_mode; /*!< 配置CAN的工作模式 */
uint8_t resync_jump_width; /*!< 重新同步跳跃宽度 */
uint8_t time_segment_1; /*!< 配置 BS1 段长度 */
uint8_t time_segment_2; /*!< 配置 BS2 段长度 */
ControlStatus time_triggered; /*!< 时间触发通信方式 */
ControlStatus auto_bus_off_recovery; /*!< 自动离线管理 */
ControlStatus auto_wake_up; /*!< 自动唤醒功能 */
ControlStatus auto_retrans; /*!< 自动重传模式 */
ControlStatus rec_fifo_overwrite; /*!< 配置接收 FIFO 锁定 */
ControlStatus trans_fifo_order; /*!< 配置 FIFO 优先级 */
uint16_t prescaler; /*!< 配置CAN外设的时钟频率 */
}can_parameter_struct;
(1)working_mode
设置CAN的工作模式,可设置为正常通信模式(CAN_NORMAL_MODE),回环通信模式(CAN_LOOPBACK_MODE),静默通信模式(CAN_SILENT_MODE)以及回环静默通信模式(CAN_SILENT_LOOPBACK_MODE)。
CAN 总线控制器通常工作在正常通信模式下,可以从 CAN 总线接收数据,也可以向 CAN 总线发送数据。(详情请查看GD32F10x用户手册)
(2)resync_jump_width
设置CAN的再同步补偿宽度SJW,对CAN网络节点同步误差进行补偿占1~4个时间单元。(CAN_BT_SJW_1/2/3/4TQ)
(3)time_segment_1
设置CAN位时序中BS1段长度,可以配置为1~16个时间单元。(CAN_BT_BS1_1~16TQ)
(4)time_segment_2
设置CAN位时序中BS2段长度,可以配置为1~8个时间单元。(CAN_BT_BS2_1~8TQ)
(5)time_triggered
用于配置是否使用时间触发功能(ENABLE / DISABLE)。在这种通信模式下,自动重发功能是禁止的。
(6)auto_bus_off_recovery
用于配置是否使用自动离线管理功能(ENABLE / DISABLE),使用自动离线管理可以在节点出错离线后适应自动恢复,不需要软件干预。
(7)auto_wake_up
用于配置是否使用自动唤醒功能(ENABLE / DISABLE),使用自动唤醒功能后会在检测到总线活动后自动唤醒。
(8)auto_retrans
用于配置是否使用自动重传功能(ENABLE / DISABLE),使用自动重传功能时,会一直发送报文直到成功为止,否则只会发送一次报文。
(9)rec_fifo_overwrite
用于配置是否使用接收FIFO锁定功能(ENABLE / DISABLE),锁定接收FIFO后,FIFO溢出时会丢弃新数据,否则在FIFO溢出时新数据覆盖旧数据。
(10)trans_fifo_order
用于设置是否使用发送报文的优先级判定方法(ENABLE / DISABLE),使能后,以报文存入FIFO的先后顺序来发送,否则按照报文ID的优先级来发送。
(11)prescaler
设置CAN外设的时钟分频,写入的值即为分频值。可控制时间片的时间长度。
波特率计算:
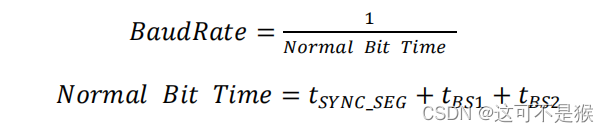
快速计算:BaudRate = APB1_LCK / ( 1 + time_segment_1 +time_segment_2 ) / prescaler
例:APB1总线时钟频率为54MHZ,BS1=5,BS2=3,prescaler=12,实际波特率为500Kbps。
2.2 CAN过滤器结构体
API:void can_filter_init(can_filter_parameter_struct* can_filter_parameter_init)
can_filter_parameter_struct:过滤器结构体
/* CAN filter parameters structure */
typedef struct
{
uint16_t filter_list_high; /*!< 过滤器列表高位数 */
uint16_t filter_list_low; /*!< 过滤器列表低位数 */
uint16_t filter_mask_high; /*!< 滤波掩码数高位数 */
uint16_t filter_mask_low; /*!< 滤波掩码数低位数 */
uint16_t filter_fifo_number; /*!< 接收与过滤器相关联的FIFO */
uint16_t filter_number; /*!< 筛选器编号 */
uint16_t filter_mode; /*!< 列表或掩码模式 */
uint16_t filter_bits; /*!< 筛选器位宽 */
ControlStatus filter_enable; /*!< 是否使能改筛选器 */
}can_filter_parameter_struct;

注:SFID为标准帧ID,长度为11bit;EFID为扩展帧ID,长度为18bit。
FF为帧格式(0:标准帧 / 1:扩展帧),FT为帧类型(0:数据帧 / 1:遥控帧)
(1)filter_list_high
用于存储要过滤的ID,若过滤器工作在32位模式,他存储的是所过滤ID的高16位;若过滤器工作在16位模式,它存储的就是一个完整的要过滤的ID。
(2)filter_list_low
用于存储要过滤的ID,若过滤器工作在32位模式,他存储的是所过滤ID的低16位;若过滤器工作在16位模式,它存储的就是一个完整的要过滤的ID。
(3)filter_mask_high
filter_mask_high的存储的内容分两种情况,当过滤器工作在列表模式时,他的功能与filter_list_high相同,都是存储要过滤的ID;当工作在掩码模式时,它存储的是与filter_list_high成员对应的掩码。
(4)filter_mask_low
filter_mask_low的存储的内容分两种情况,当过滤器工作在列表模式时,他的功能与filter_list_low相同,都是存储要过滤的ID;当工作在掩码模式时,它存储的是与filter_list_low成员对应的掩码。
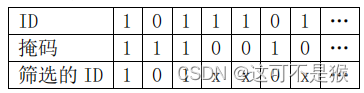
在掩码模式下,filter_mask_high与filter_mask_low填入的是要筛选的掩码,掩码为1时,筛选的ID必须与ID相同。
列表模式下,筛选的ID需与ID相同。
(5)filter_fifo_number
用于设置当报文通过过滤器匹配后,该报文会被存储到哪个接收FIFO中(CAN_FIFO0/1)。
(6)filter_number
用于设计过滤器的编号。
(7)filter_mode
设置过滤器的工作模式,可以设置为列表模式(CAN_FILTERMODE_LIST),也可以设置为掩码模式(CAN_FILTERMODE_MASK)。
(8)filter_bits
设置过滤器位宽(32位或16位)。
(9)filter_enable
用于设置是否使能这个过滤器(ENABLE/DISABLE)。
2.3 CAN发送及接收结构体
API:
uint8_t can_message_transmit(uint32_t can_periph, can_trasnmit_message_struct* transmit_message);//发送CAN报文
void can_message_receive(uint32_t can_periph, uint8_t fifo_number, can_receive_message_struct* receive_message);//接收CAN报文
/* CAN 发送报文结构 */
typedef struct
{
uint32_t tx_sfid; /*!< 标准帧ID */
uint32_t tx_efid; /*!< 扩展帧ID */
uint8_t tx_ff; /*!< 帧格式,标准帧或数据帧 */
uint8_t tx_ft; /*!< 帧类型,数据帧或遥控帧 */
uint8_t tx_dlen; /*!< 数据长度 */
uint8_t tx_data[8]; /*!< 传输的数据 */
}can_trasnmit_message_struct;
/* CAN 接收报文结构 */
typedef struct
{
uint32_t rx_sfid; /*!< 标准帧ID */
uint32_t rx_efid; /*!< 扩展帧ID */
uint8_t rx_ff; /*!< 帧格式,标准帧或数据帧 */
uint8_t rx_ft; /*!< 帧类型,数据帧或遥控帧 */
uint8_t rx_dlen; /*!< 数据长度 */
uint8_t rx_data[8]; /*!< 接收的数据 */
uint8_t rx_fi; /*!< 过滤器编号 */
} can_receive_message_struct;
3. 硬件与引脚连接
MCU:GD32F103VET6;
CAN模块;//CAN收发器,GD32的CAN只是控制器

RS232_CAN模块;//用于单片机与电脑通信

3.1 MCU引脚选择:
| 寄存器 |
CAN0 |
| CAN0_REMAP[1:0]="00" |
PA11(CAN0_RX) PA12(CAN0_TX) |
| CAN0_REMAP[1:0]="10" |
PB8(CAN0_RX) PB9(CAN0_TX) |
| CAN0_REMAP[1:0]="11" |
PD0(CAN0_RX) PD1(CAN0_TX) |
在这3组引脚中可任意选择一组作为CAN0的通信引脚。使用PB8、PB9或PD0、PD1时,需分别打开GPIO的部分重映射和完全重映射功能,本文中使用PB8、PB9两个引脚。
API:void gpio_pin_remap_config(uint32_t remap, ControlStatus newvalue)
GPIO_CAN_PARTIAL_REMAP:CAN部分重映射
GPIO_CAN_FULL_REMAP:CAN全重映射
3.2 MCU与CAN模块连接
| GD32F103 |
CAN收发器 |
| 3.3V或5V |
VCC |
| GND |
GND |
| PB8 |
RX |
| PB9 |
TX |
在数据通信引脚连接时,不需要反接,MCU的RX接CAN收发器RX即可。
3.3 CAN模块与RS232_CAN模块连接
没有RS232_CAN模块也可使用双机通信,RS232_CAN模块实际也是一个单片机与CAN收发器连接与电脑进行通信。
| CAN模块 |
RS232_CAN |
| CAN_H |
CAN_H |
| CAN_L |
CAN_L |
| GND |
GND |
| 5V(MCU) |
5-24V |
4. 驱动代码
4.1 CAN初始化配置
/*
\brief: CAN0初始化配置 波特率500Kbps
引脚连接: CAN_TX PB9
CAN_RX PB8
\param: none
\retval: none
*/
void CAN_Init(void)
{
can_parameter_struct can0_param_struct;
can_filter_parameter_struct can0_filter_param_struct; //筛选器结构体
//1.引脚初始化配置
gpio_pin_remap_config(GPIO_CAN_PARTIAL_REMAP,ENABLE); //开启CAN部分重映射
gpio_init(GPIOB,GPIO_MODE_IPU,GPIO_OSPEED_50MHZ,GPIO_PIN_8);
gpio_init(GPIOB,GPIO_MODE_AF_PP,GPIO_OSPEED_50MHZ,GPIO_PIN_9);
//2.初始化CNA0
can_deinit(CAN0); //复位CAN0
can0_param_struct.working_mode = CAN_NORMAL_MODE; //正常通信模式
can0_param_struct.time_triggered = DISABLE; //静止时间触发通信
can0_param_struct.auto_bus_off_recovery = DISABLE; //静止离线恢复
can0_param_struct.auto_wake_up = DISABLE; //禁止自动唤醒
can0_param_struct.auto_retrans = ENABLE; //使能自动重传
can0_param_struct.rec_fifo_overwrite = DISABLE; //禁用接收FIFO锁定
can0_param_struct.trans_fifo_order = DISABLE; //禁用FIFO优先级
//波特率 54M/(1+3+5)/12
can0_param_struct.resync_jump_width = CAN_BT_SJW_1TQ; //再同步宽度补偿 1TQ
can0_param_struct.time_segment_1 = CAN_BT_BS1_3TQ; //位段1长度
can0_param_struct.time_segment_2 = CAN_BT_BS2_5TQ; //位段2长度
can0_param_struct.prescaler = 12; //预分频系数
if(can_init(CAN0,&can0_param_struct)==ERROR)
{
return ;
}
//3.配置CAN过滤器
can0_filter_param_struct.filter_list_high = (((uint32_t)0x000<<21|CAN_FT_DATA|CAN_FF_STANDARD)&0xFFFF0000)>>16; //过滤器高字节
can0_filter_param_struct.filter_list_low = (((uint32_t)0x000<<21|CAN_FT_DATA|CAN_FF_STANDARD) & 0x0000FFFF); //过滤器低字节
can0_filter_param_struct.filter_mask_high = 0x0000; //过滤器掩码数高位
can0_filter_param_struct.filter_mask_low = 0x0000; //过滤器掩码数低位
can0_filter_param_struct.filter_fifo_number = CAN_FIFO0; //滤过器关联FIFO0
can0_filter_param_struct.filter_number = 0;
can0_filter_param_struct.filter_mode = CAN_FILTERMODE_MASK; //掩码模式
can0_filter_param_struct.filter_bits = CAN_FILTERBITS_32BIT;//32位
can0_filter_param_struct.filter_enable = ENABLE;
can_filter_init(&can0_filter_param_struct);
//4.配置中断
can_interrupt_enable(CAN0,CAN_INT_RFNE0);
}
(1)配置GPIO工作模式。配置CAN部分重映射,将PB8配置为上拉输入模式,PB9配置为复用推挽输出模式。
(2)初始化CAN0。该结构体重要的是将CAN配置为正常通信模式,并配置波特率,其他功能配置可根据实际需求配置。值得注意的是,在配置波特率时需要配置准确,否则将无法进行通信。
(3)配置过滤器。在这里选择了32位掩码模式,关联FIFO0。过滤器掩码高低位都设置为0x0000000,接收所有ID的数据。这里先确保可以接收到数据。

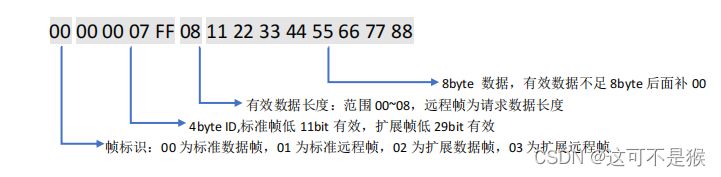
filter_list_high和filter_list_low中需要填入需要筛选的ID,由上图可知,32位过滤器中,
[2:0]位保存的是数据帧格式和帧类型。此处设置的帧格式为标准帧CAN_FF_STANDARD(也可设置为扩展帧CAN_FF_EXTENDED)。帧类型设置为数据帧CAN_FT_DATA(也可设置为数据帧)。
[20:3]保存扩展帧ID。
[31:21]保存标准帧ID。此处将标准帧ID(0x000)左移21位。
filter_mask_high和filter_mask_low保存过滤器掩码数,用于筛选需要的ID。在此设置为0,表示接收所有ID的数据。
(4)使能FIFO不为空中断。
4.2 发送CAN报文
/*
\brief: 发送CAN报文
\param: id:标准帧ID
data:要发送的数据
len:数据长度 0~8byte
\retval: none
*/
uint8_t CAN_Send_Message(uint32_t id,uint8_t *data,uint8_t len)
{
uint8_t i,mbox;
can0_Tx_Data.tx_efid = 0x00;
can0_Tx_Data.tx_sfid = id;
can0_Tx_Data.tx_ff = CAN_FF_STANDARD;//标准帧
can0_Tx_Data.tx_ft = CAN_FT_DATA;//数据帧
can0_Tx_Data.tx_dlen = len;
for(i=0;i<len;i++)
{
can0_Tx_Data.tx_data[i] = data[i];
}
mbox = can_message_transmit(CAN0,&can0_Tx_Data); //发送CAN报文
while(can_transmit_states(CAN0,mbox) == CAN_TRANSMIT_PENDING); //等待发送完成
if(can_transmit_states(CAN0,mbox) == CAN_TRANSMIT_OK)
{
return 0;
}
return 1;
}
发送CAN报文主要是填充can_trasnmit_message_struct 结构体,调用can_message_transmit函数发送报文即可。在等待发送完成中可加入超时重发或者强制退出,避免函数卡死。
4.3 接收CAN报文
//中断服务函数,接收CAN报文
void USBD_LP_CAN0_RX0_IRQHandler(void)
{
if(can_interrupt_flag_get(CAN0,CAN_INT_FLAG_RFL0))
{
memset(&can0_Rx_Data,0,sizeof(can0_Rx_Data));//清空接收结构体
can_message_receive(CAN0,CAN_FIFO0,&can0_Rx_Data);//获取信息
}
}
FIFO非空是会触发CAN非空中断,首先初始化接收结构体,然后读取FIFO中的数据。在GD32F103的CAN中断中没有清除非空标志位这个函数,can_message_receive接收CAN报文函数中不仅将数据保存至结构体中,还释放了一次数据。
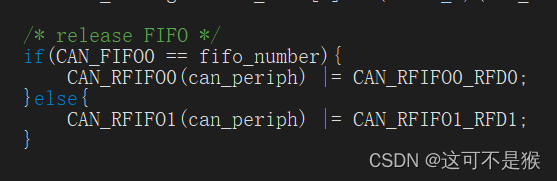
观用户手册可知,FIFO中可保存3帧报文。FIFO0帧的数量保存在CAN_RFIFO0寄存器的RFL0[1:0]中,置位RFD0将释放一次FIFO中帧的数据即RFL0[1:0] - 1。

4.4 main函数
#include "main.h"
void rcu_config(void);
void nvic_config(void);
/*!
\brief main function
\param[in] none
\param[out] none
\retval none
*/
int main(void)
{
//gpio_afio_deinit();
/* system clocks configuration */
rcu_config();
nvic_config();
/* systick configuration */
systick_config();
UART_init();
/* Initialize the peripheral module */
CAN_Init();
uint8_t t_data[8]={0,99,3,4,5,55,7,110};
while(1){
CAN_Send_Message(0x0000,t_data,8);
delay_1ms(1000);
}
}
/*!
\brief configure the different system clocks
\param[in] none
\param[out] none
\retval none
*/
void rcu_config(void)
{
/* enable GPIO clock */
rcu_periph_clock_enable(RCU_AF);
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_GPIOB);
rcu_periph_clock_enable(RCU_GPIOC);
rcu_periph_clock_enable(RCU_GPIOD);
rcu_periph_clock_enable(RCU_GPIOE);
/* enable periph clock */
rcu_periph_clock_enable(RCU_CAN0);
rcu_periph_clock_enable(RCU_DMA0);
rcu_periph_clock_enable(RCU_USART2);
rcu_periph_clock_enable(RCU_UART3);
}
/*!
\brief enable the different NVIC request
\param[in] none
\param[out] none
\retval none
*/
void nvic_config(void)
{
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);
nvic_irq_enable(USBD_LP_CAN0_RX0_IRQn,1,0);
}
main.c中还是一如既往的配置外设时钟,配置中断优先级和初始化外设。
(1)时钟配置:在使用过程中只需使能AFIO、GPIOB和CAN0时钟即可。
(2)配置中断优先级分组和中断优先级。
(3)初始化外设。
(4)每秒钟向外发送一次报文。
4.5 实验结果
电脑接收报文:软件配置波特率为500Kbps

在RS232_CAN软件上,发送和读取的数据为16进制。MCU发送的数据与电脑上接收的数据一致。
MCU接收报文:
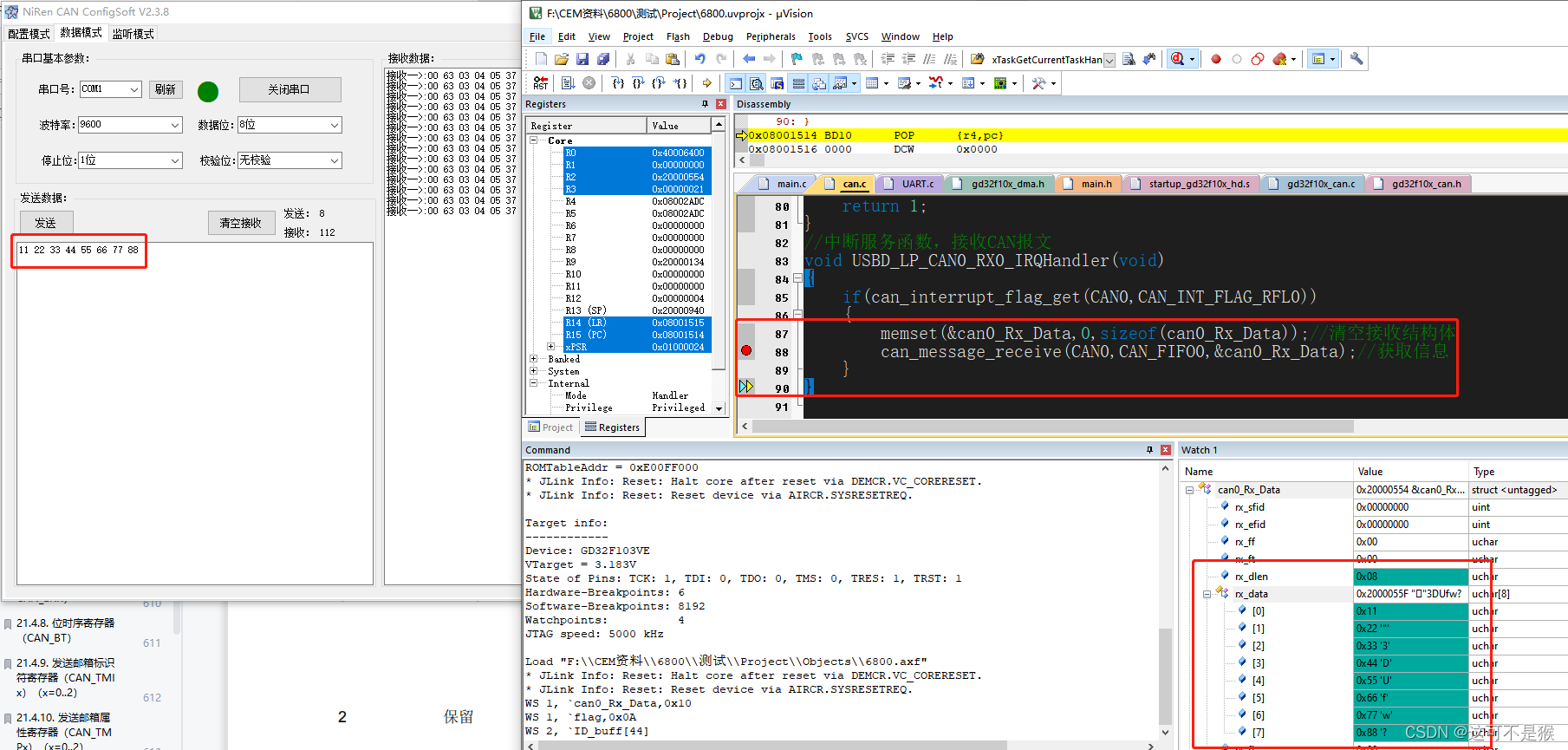
使用KEIL软件上的调试功能,发送数据后,代码运行至打断点位置,单步运行至函数最下方,读取到的数据保存至接收CAN报文结构体中。数据长度为8个字节,数据与发送的数据一致。RS232_CAN软件上的标准帧ID设置为0x000,所以MCU中读取到的ID也为0x000。使用双机进行通信的代码配置和操作基本相同。
5. 使用筛选功能
上述测试中将过滤器掩码设置为0,即接收所有ID报文,无法体现CAN的筛选器功能。以下将修改ID和掩码,测试是否能筛选特定ID。
5.1 筛选固定ID数据
本次测试只接收一个ID的数据,其他ID数据不接收。
RS232_CAN帧模式
标准帧ID范围为0x000~0x7FF,共11为数据。此次测试只接收ID为0x7FF的标准数据帧,其他数据帧一律不接收。
过滤器中写入的ID:(32位宽)
过滤器 1111 1110 0000 0000 0000 0000 0000 0000 //[31:21]位为标准帧ID
掩码 1111 1110 0000 0000 0000 0000 0000 0110 //[2:1]筛选标准数据帧,[31:21]筛选ID
掩码中填入的数据即:0xFE00 0006; //扩展ID位也可全填入1
void CAN_Init(void)
{
can_parameter_struct can0_param_struct;
can_filter_parameter_struct can0_filter_param_struct; //筛选器结构体
//1.引脚初始化配置
gpio_pin_remap_config(GPIO_CAN_PARTIAL_REMAP,ENABLE); //开启CAN部分重映射
gpio_init(GPIOB,GPIO_MODE_IPU,GPIO_OSPEED_50MHZ,GPIO_PIN_8);
gpio_init(GPIOB,GPIO_MODE_AF_PP,GPIO_OSPEED_50MHZ,GPIO_PIN_9);
//2.初始化CNA0
can_deinit(CAN0); //复位CAN0
can0_param_struct.working_mode = CAN_NORMAL_MODE; //正常通信模式
can0_param_struct.time_triggered = DISABLE; //静止时间触发通信
can0_param_struct.auto_bus_off_recovery = DISABLE; //静止离线恢复
can0_param_struct.auto_wake_up = DISABLE; //禁止自动唤醒
can0_param_struct.auto_retrans = ENABLE; //使能自动重传
can0_param_struct.rec_fifo_overwrite = DISABLE; //禁用接收FIFO锁定
can0_param_struct.trans_fifo_order = DISABLE; //禁用FIFO优先级
//波特率 54M/(1+3+5)/12
can0_param_struct.resync_jump_width = CAN_BT_SJW_1TQ; //再同步宽度补偿 1TQ
can0_param_struct.time_segment_1 = CAN_BT_BS1_3TQ; //位段1长度
can0_param_struct.time_segment_2 = CAN_BT_BS2_5TQ; //位段2长度
can0_param_struct.prescaler = 12; //预分频系数
if(can_init(CAN0,&can0_param_struct)==ERROR)
{
return ;
}
//3.配置CAN过滤器
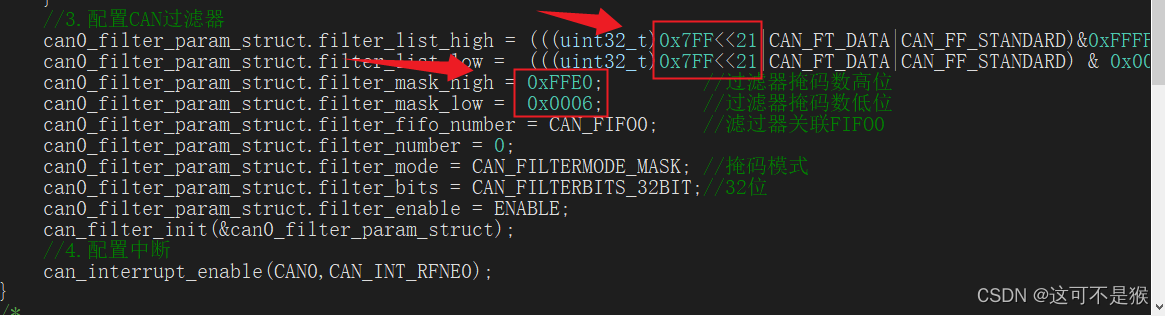
can0_filter_param_struct.filter_list_high = (((uint32_t)0x7FF<<21|CAN_FT_DATA|CAN_FF_STANDARD)&0xFFFF0000)>>16; //过滤器高字节
can0_filter_param_struct.filter_list_low = (((uint32_t)0x7FF<<21|CAN_FT_DATA|CAN_FF_STANDARD) & 0x0000FFFF); //过滤器低字节
can0_filter_param_struct.filter_mask_high = 0xFFE0; //过滤器掩码数高位
can0_filter_param_struct.filter_mask_low = 0x0006; //过滤器掩码数低位
can0_filter_param_struct.filter_fifo_number = CAN_FIFO0; //滤过器关联FIFO0
can0_filter_param_struct.filter_number = 0;
can0_filter_param_struct.filter_mode = CAN_FILTERMODE_MASK; //掩码模式
can0_filter_param_struct.filter_bits = CAN_FILTERBITS_32BIT;//32位
can0_filter_param_struct.filter_enable = ENABLE;
can_filter_init(&can0_filter_param_struct);
//4.配置中断
can_interrupt_enable(CAN0,CAN_INT_RFNE0);
}
代码只修改了以下几处。
测试1:ID号与帧格式相同
发送:00 00 00 07 FF 08 11 22 33 44 55 66 77 88
接收:ID:0x7FF(标准数据帧)
数据长度:8
数据: 11 22 33 44 55 66 77 88

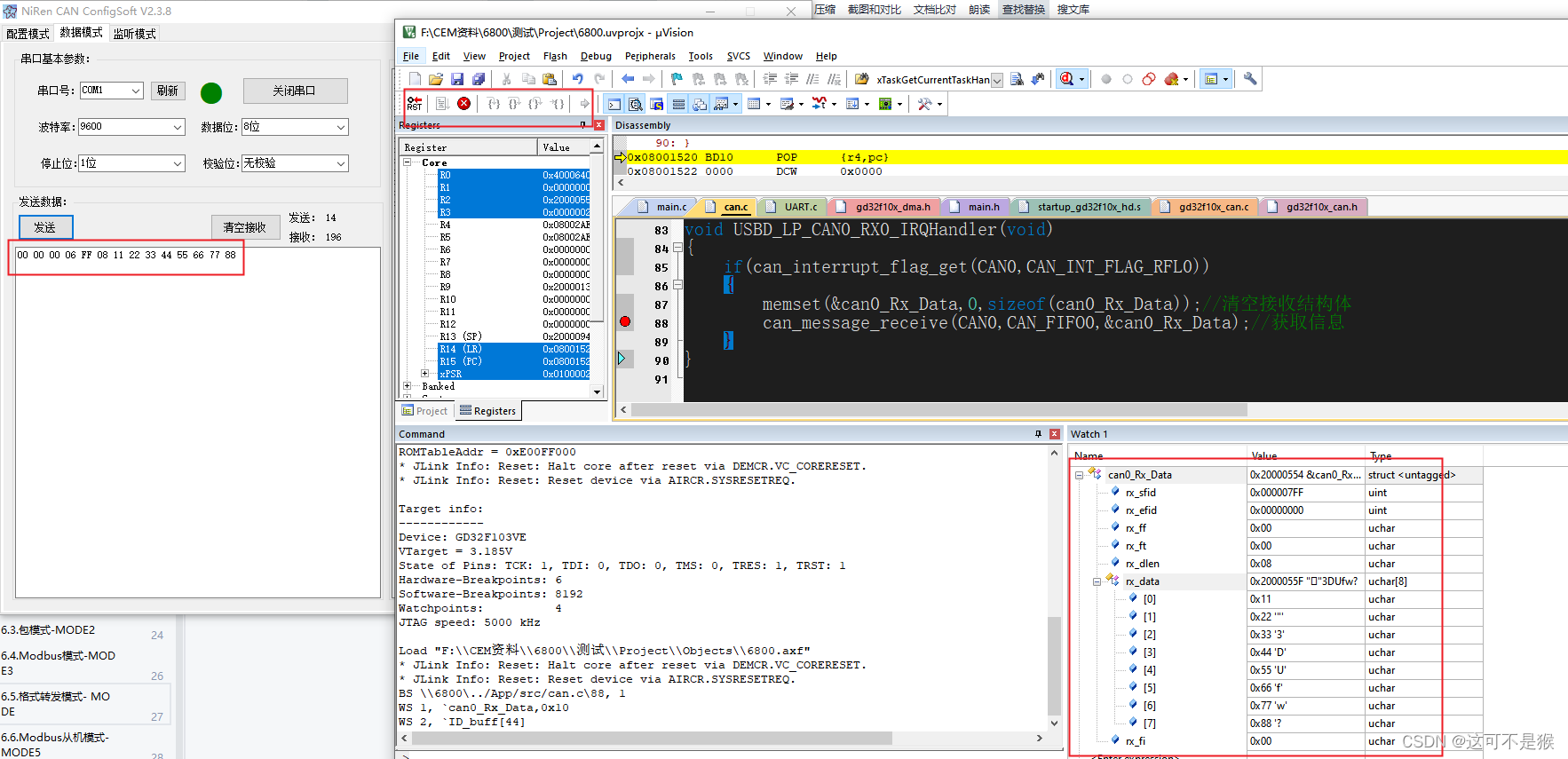
测试2:帧格式相同,ID不同
发送:00 00 00 06 FF 08 11 22 33 44 55 66 77 88
接收:无接收,程序未进入中断。
测试3:ID相同,数据帧不同
发送:01 00 00 07 FF 08 11 22 33 44 55 66 77 88
接收:无接收,未程序未进入中断。
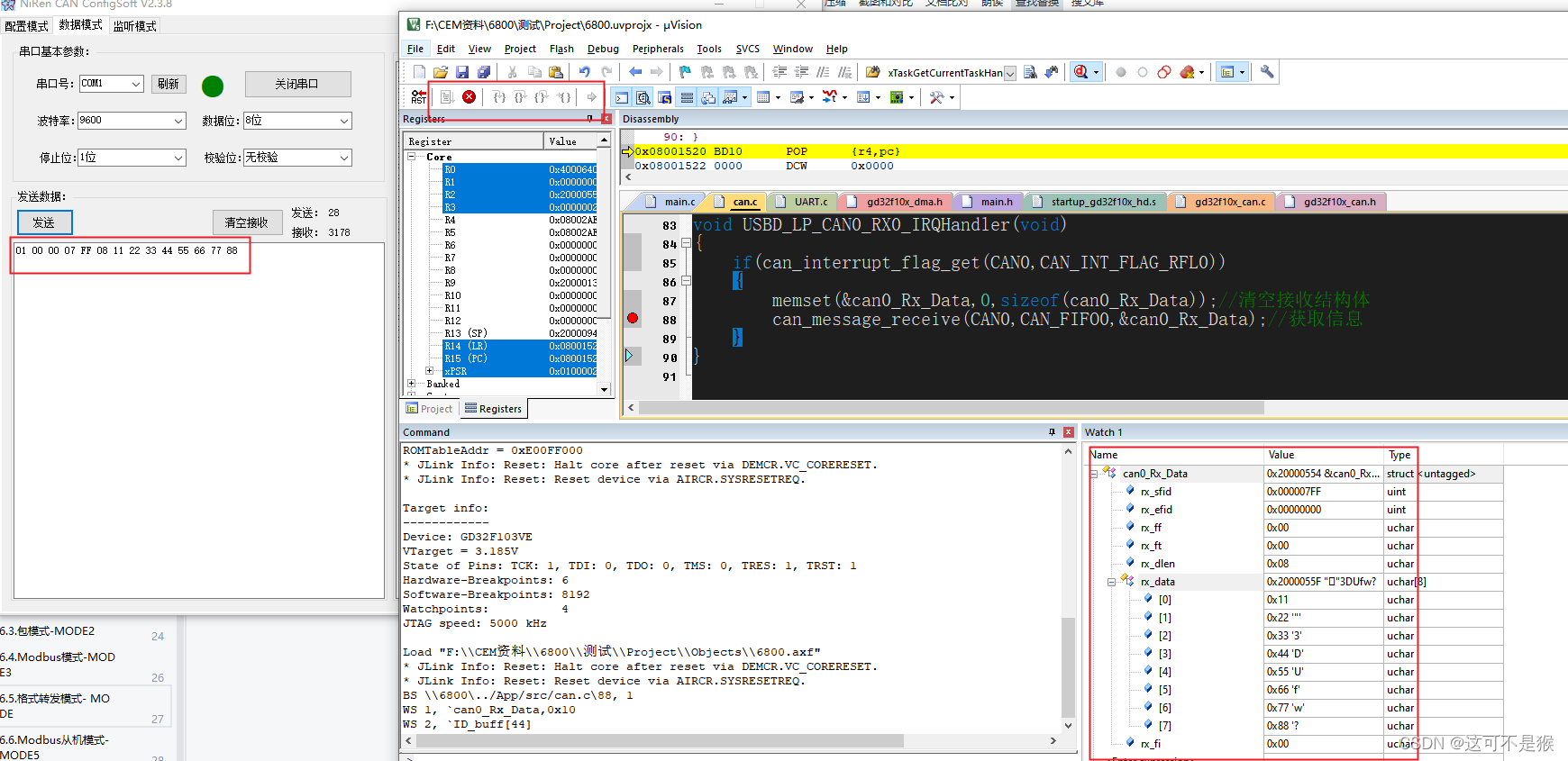
测试成功!
5.2 接收多个ID数据
在具体使用过程中,会存在接收多个ID数据的情况,本次测试只接收多个固定ID的数据。
例如:标准帧ID:0x000~0x7FF.
只接收标准帧ID为:0x200~0x2FF的数据。
过滤器 0010 0000 0000 0000 0000 0000 0000 0000
掩码 1110 0000 0000 0000 0000 0000 0000 0110
掩码中填入0xE000 0006。
由于只接收ID为0x200~0x2FF的数据,只需将掩码的[31:29]位都置一。
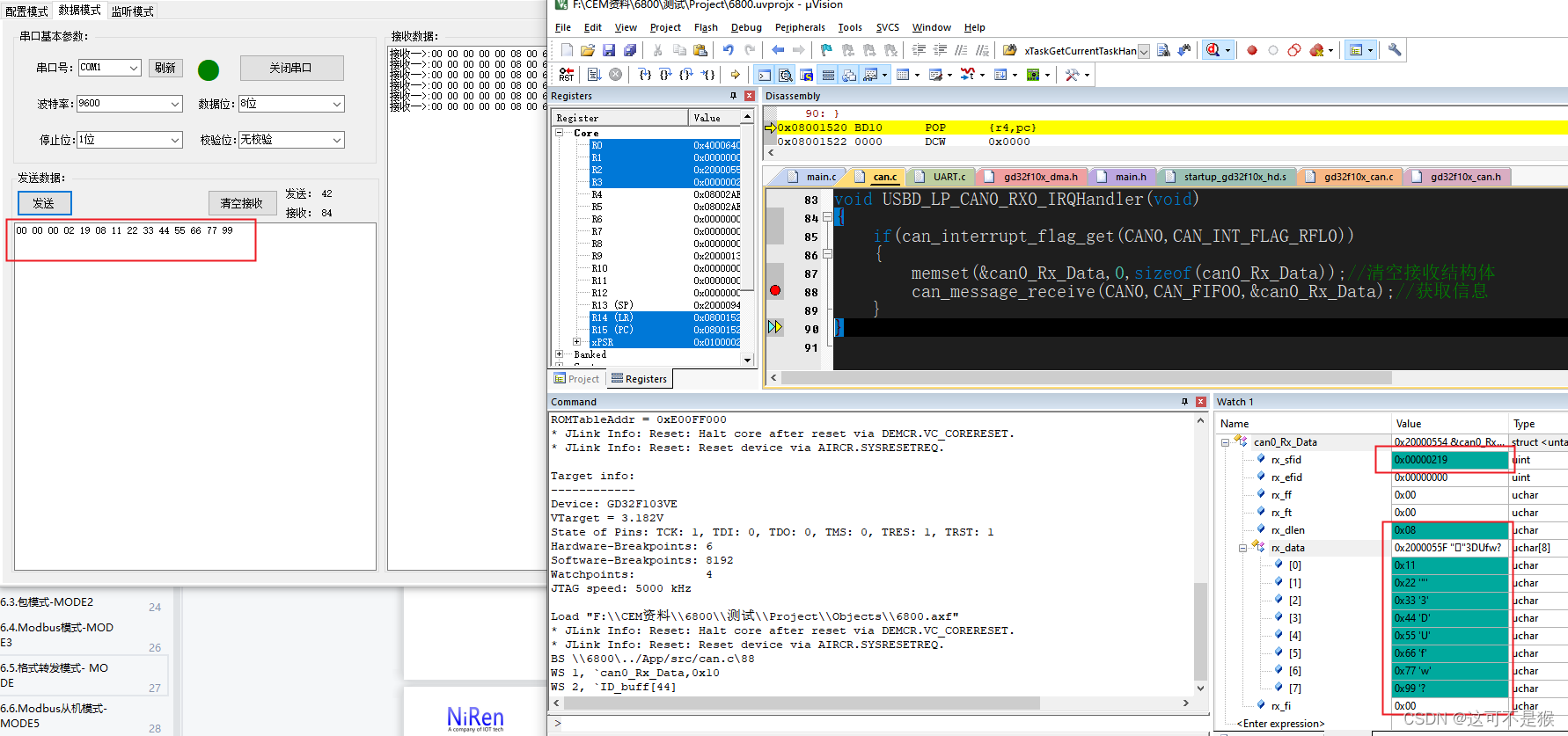
测试1:写入范围内的标准数据帧ID
写入:00 00 00 02 00 08 11 22 33 44 55 66 77 88
接收:ID:0x200(标准数据帧)
数据长度:8
数据:11 22 33 44 55 66 77 88

写入:00 00 00 02 19 08 11 22 33 44 55 66 77 99
接收:ID:0x219(标准数据帧)
数据长度:8
数据:11 22 33 44 55 66 77 99
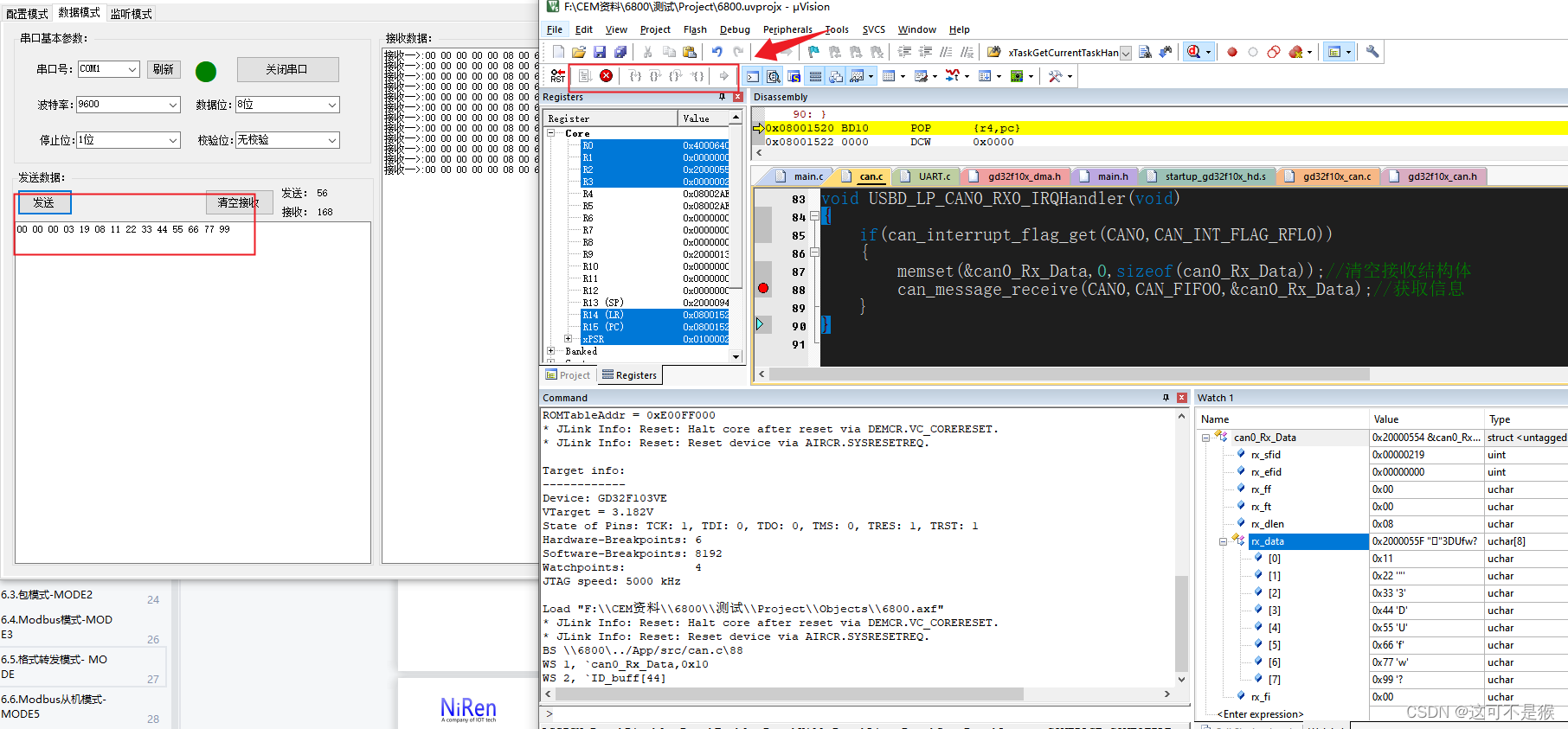
测试2:写入范围外的ID
发送:00 00 00 03 19 08 11 22 33 44 55 66 77 99
接收:无接收(程序未进入中断)
测试成功!
6. 参考程序
can.c
#include "can.h"
#include <string.h>
can_receive_message_struct can0_Rx_Data;
can_trasnmit_message_struct can0_Tx_Data;
/*
\brief: CAN0初始化配置 波特率500Kbps
引脚连接: CAN_TX PB9
CAN_RX PB8
\param: none
\retval: none
*/
void CAN_Init(void)
{
can_parameter_struct can0_param_struct;
can_filter_parameter_struct can0_filter_param_struct; //筛选器结构体
//1.引脚初始化配置
gpio_pin_remap_config(GPIO_CAN_PARTIAL_REMAP,ENABLE); //开启CAN部分重映射
gpio_init(GPIOB,GPIO_MODE_IPU,GPIO_OSPEED_50MHZ,GPIO_PIN_8);
gpio_init(GPIOB,GPIO_MODE_AF_PP,GPIO_OSPEED_50MHZ,GPIO_PIN_9);
//2.初始化CNA0
can_deinit(CAN0); //复位CAN0
can0_param_struct.working_mode = CAN_NORMAL_MODE; //正常通信模式
can0_param_struct.time_triggered = DISABLE; //静止时间触发通信
can0_param_struct.auto_bus_off_recovery = DISABLE; //静止离线恢复
can0_param_struct.auto_wake_up = DISABLE; //禁止自动唤醒
can0_param_struct.auto_retrans = ENABLE; //使能自动重传
can0_param_struct.rec_fifo_overwrite = DISABLE; //禁用接收FIFO锁定
can0_param_struct.trans_fifo_order = DISABLE; //禁用FIFO优先级
//波特率 54M/(1+3+5)/12
can0_param_struct.resync_jump_width = CAN_BT_SJW_1TQ; //再同步宽度补偿 1TQ
can0_param_struct.time_segment_1 = CAN_BT_BS1_3TQ; //位段1长度
can0_param_struct.time_segment_2 = CAN_BT_BS2_5TQ; //位段2长度
can0_param_struct.prescaler = 12; //预分频系数
if(can_init(CAN0,&can0_param_struct)==ERROR)
{
return ;
}
//3.配置CAN过滤器
can0_filter_param_struct.filter_list_high = (((uint32_t)0x200<<21|CAN_FT_DATA|CAN_FF_STANDARD)&0xFFFF0000)>>16; //过滤器高字节
can0_filter_param_struct.filter_list_low = (((uint32_t)0x200<<21|CAN_FT_DATA|CAN_FF_STANDARD) & 0x0000FFFF); //过滤器低字节
can0_filter_param_struct.filter_mask_high = 0xE000; //过滤器掩码数高位
can0_filter_param_struct.filter_mask_low = 0x0006; //过滤器掩码数低位
can0_filter_param_struct.filter_fifo_number = CAN_FIFO0; //滤过器关联FIFO0
can0_filter_param_struct.filter_number = 0;
can0_filter_param_struct.filter_mode = CAN_FILTERMODE_MASK; //掩码模式
can0_filter_param_struct.filter_bits = CAN_FILTERBITS_32BIT;//32位
can0_filter_param_struct.filter_enable = ENABLE;
can_filter_init(&can0_filter_param_struct);
//4.配置中断
can_interrupt_enable(CAN0,CAN_INT_RFNE0);
}
/*
\brief: 发送CAN报文
\param: id:标准帧ID
data:要发送的数据
len:数据长度 0~8byte
\retval: none
*/
uint8_t CAN_Send_Message(uint32_t id,uint8_t *data,uint8_t len)
{
uint8_t i,mbox;
can0_Tx_Data.tx_efid = 0x00;
can0_Tx_Data.tx_sfid = id;
can0_Tx_Data.tx_ff = CAN_FF_STANDARD;//标准帧
can0_Tx_Data.tx_ft = CAN_FT_DATA;//数据帧
can0_Tx_Data.tx_dlen = len;
for(i=0;i<len;i++)
{
can0_Tx_Data.tx_data[i] = data[i];
}
mbox = can_message_transmit(CAN0,&can0_Tx_Data); //发送CAN报文
while(can_transmit_states(CAN0,mbox) == CAN_TRANSMIT_PENDING); //等待发送完成
if(can_transmit_states(CAN0,mbox) == CAN_TRANSMIT_OK)
{
return 0;
}
return 1;
}
//中断服务函数,接收CAN报文
void USBD_LP_CAN0_RX0_IRQHandler(void)
{
if(can_interrupt_flag_get(CAN0,CAN_INT_FLAG_RFL0))
{
memset(&can0_Rx_Data,0,sizeof(can0_Rx_Data));//清空接收结构体
can_message_receive(CAN0,CAN_FIFO0,&can0_Rx_Data);//获取信息
}
}
can.h
#ifndef _CAN_H_
#define _CAN_H_
#include "gd32f10x.h"
#define CAN0_ID 0x200 //ID号
extern can_receive_message_struct can0_Rx_Data;//读取信息结构体
extern can_trasnmit_message_struct can0_Tx_Data;//发送信息结构体
void CAN_Init(void);
uint8_t CAN_Send_Message(uint32_t id,uint8_t *data,uint8_t len);
#endif
mian.c
#include "main.h"
void rcu_config(void);
void nvic_config(void);
/*!
\brief main function
\param[in] none
\param[out] none
\retval none
*/
int main(void)
{
//gpio_afio_deinit();
/* system clocks configuration */
rcu_config();
nvic_config();
/* systick configuration */
systick_config();
//UART_init();
/* Initialize the peripheral module */
CAN_Init();
uint8_t t_data[8]={0,99,3,4,5,55,7,110};
while(1){
CAN_Send_Message(0x0000,t_data,8);
delay_1ms(1000);
}
}
/*!
\brief configure the different system clocks
\param[in] none
\param[out] none
\retval none
*/
void rcu_config(void)
{
/* enable GPIO clock */
rcu_periph_clock_enable(RCU_AF);
rcu_periph_clock_enable(RCU_GPIOB);
/* enable periph clock */
rcu_periph_clock_enable(RCU_CAN0);
}
/*!
\brief enable the different NVIC request
\param[in] none
\param[out] none
\retval none
*/
void nvic_config(void)
{
nvic_priority_group_set(NVIC_PRIGROUP_PRE2_SUB2);
nvic_irq_enable(USBD_LP_CAN0_RX0_IRQn,1,0);
}
最后
文章写的不好,希望能对初学CAN总线通信的友友们有所帮助!文章有错误的或者有更容易理解的方法,希望能写到评论区供大家学习。
非常感谢!
2023/06/28