新代码:可用,如果不想在老代码上折腾更改,可以直接根据下面的新地址拉取代码。 (注意看Readme)
--------------------更新20180703-----------------
由于以前上传的项目有点点小问题,完整更新项目及说明如下链接。
https://github.com/RongSong1993/YOLOv3-SaveVideo-New/tree/master
---------------------更新20180703---------------------
老代码:同样可用,就是保存视频时会闪烁,现在评论区出现了一个解决方案,欢迎大家尝试(拉到文末查看)。
YOLOv3保存检测视频完整项目地址: https://github.com/RongSong1993/YOLOv3_SaveVideo
最近一段时间配置运行了下YOLO3网络,官方项目地址:https://pjreddie.com/darknet/yolo/,整个配置过程比较简单,按照上面那个网站操作就可以了。但是官网项目在测试本地视频或通过摄像头(webcam)获得的视频时,默认是没有保存运行结果的,因此这里主要讲的是如何保存yolo3运行检测的视频结果。有问题可以评论留言,算法没仔细研究,主要是讲述操作流程。
假设你的项目路径为./darknet,需要改动的主要有两个文件,分别是位于./darknet/src/路径下的demo.c和image.c文件。
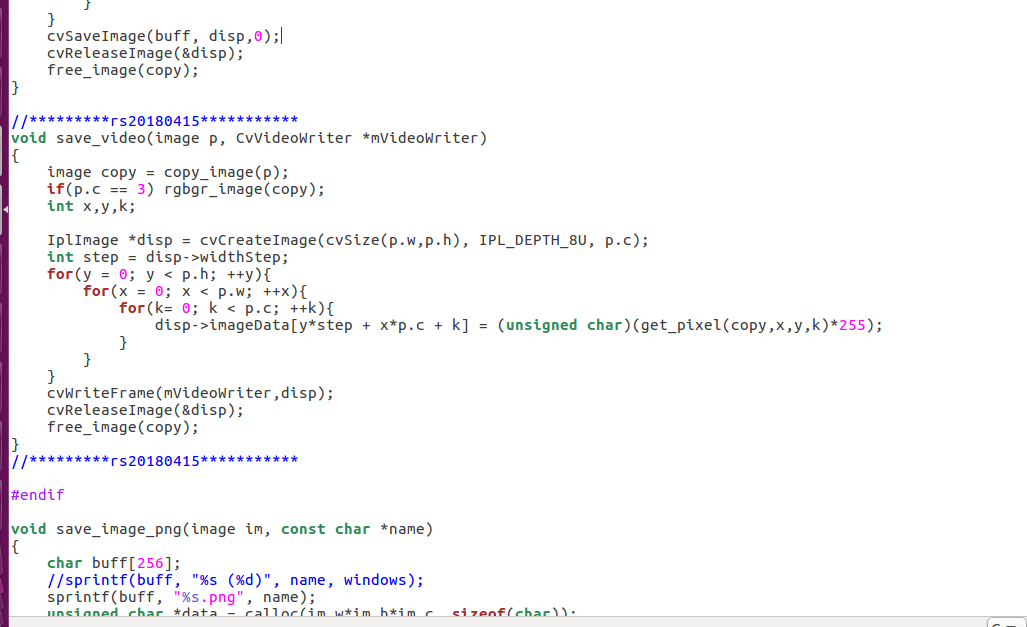
(1)首先在image.c文件中添加save_video函数的定义,代码及截图位置如下:
void save_video(image p, CvVideoWriter *mVideoWriter)
{
image copy = copy_image(p);
if(p.c == 3) rgbgr_image(copy);
int x,y,k;
IplImage *disp = cvCreateImage(cvSize(p.w,p.h), IPL_DEPTH_8U, p.c);
int step = disp->widthStep;
for(y = 0; y < p.h; ++y){
for(x = 0; x < p.w; ++x){
for(k= 0; k < p.c; ++k){
disp->imageData[y*step + x*p.c + k] = (unsigned char)(get_pixel(copy,x,y,k)*255);
}
}
}
cvWriteFrame(mVideoWriter,disp);
cvReleaseImage(&disp);
free_image(copy);
}
对应位置截图如下:
(2) 然后更改demo.c文件代码,由于改动内容有多处,因此这里帖是完整的demo.c文件代码,每一组//*********rs20180415***********之间代码就是新添加的代码内容,可自行对比,包括设置你输出检测视频的名称和帧率。
#include "network.h"
#include "detection_layer.h"
#include "region_layer.h"
#include "cost_layer.h"
#include "utils.h"
#include "parser.h"
#include "box.h"
#include "image.h"
#include "demo.h"
#include <sys/time.h>
#define DEMO 1
//*********rs20180415***********
#define SAVEVIDEO
//*********rs20180415***********
#ifdef OPENCV
//*********rs20180415***********
#ifdef SAVEVIDEO
static CvVideoWriter *mVideoWriter;
#endif
//*********rs20180415***********
static char **demo_names;
static image **demo_alphabet;
static int demo_classes;
static network *net;
static image buff [3];
static image buff_letter[3];
static int buff_index = 0;
static CvCapture * cap;
static IplImage * ipl;
static float fps = 0;
static float demo_thresh = 0;
static float demo_hier = .5;
static int running = 0;
static int demo_frame = 3;
static int demo_index = 0;
static float **predictions;
static float *avg;
static int demo_done = 0;
static int demo_total = 0;
double demo_time;
detection *get_network_boxes(network *net, int w, int h, float thresh, float hier, int *map, int relative, int *num);
int size_network(network *net)
{
int i;
int count = 0;
for(i = 0; i < net->n; ++i){
layer l = net->layers[i];
if(l.type == YOLO || l.type == REGION || l.type == DETECTION){
count += l.outputs;
}
}
return count;
}
void remember_network(network *net)
{
int i;
int count = 0;
for(i = 0; i < net->n; ++i){
layer l = net->layers[i];
if(l.type == YOLO || l.type == REGION || l.type == DETECTION){
memcpy(predictions[demo_index] + count, net->layers[i].output, sizeof(float) * l.outputs);
count += l.outputs;
}
}
}
detection *avg_predictions(network *net, int *nboxes)
{
int i, j;
int count = 0;
fill_cpu(demo_total, 0, avg, 1);
for(j = 0; j < demo_frame; ++j){
axpy_cpu(demo_total, 1./demo_frame, predictions[j], 1, avg, 1);
}
for(i = 0; i < net->n; ++i){
layer l = net->layers[i];
if(l.type == YOLO || l.type == REGION || l.type == DETECTION){
memcpy(l.output, avg + count, sizeof(float) * l.outputs);
count += l.outputs;
}
}
detection *dets = get_network_boxes(net, buff[0].w, buff[0].h, demo_thresh, demo_hier, 0, 1, nboxes);
return dets;
}
void *detect_in_thread(void *ptr)
{
running = 1;
float nms = .4;
layer l = net->layers[net->n-1];
float *X = buff_letter[(buff_index+2)%3].data;
network_predict(net, X);
/*
if(l.type == DETECTION){
get_detection_boxes(l, 1, 1, demo_thresh, probs, boxes, 0);
} else */
remember_network(net);
detection *dets = 0;
int nboxes = 0;
dets = avg_predictions(net, &nboxes);
/*
int i,j;
box zero = {0};
int classes = l.classes;
for(i = 0; i < demo_detections; ++i){
avg[i].objectness = 0;
avg[i].bbox = zero;
memset(avg[i].prob, 0, classes*sizeof(float));
for(j = 0; j < demo_frame; ++j){
axpy_cpu(classes, 1./demo_frame, dets[j][i].prob, 1, avg[i].prob, 1);
avg[i].objectness += dets[j][i].objectness * 1./demo_frame;
avg[i].bbox.x += dets[j][i].bbox.x * 1./demo_frame;
avg[i].bbox.y += dets[j][i].bbox.y * 1./demo_frame;
avg[i].bbox.w += dets[j][i].bbox.w * 1./demo_frame;
avg[i].bbox.h += dets[j][i].bbox.h * 1./demo_frame;
}
//copy_cpu(classes, dets[0][i].prob, 1, avg[i].prob, 1);
//avg[i].objectness = dets[0][i].objectness;
}
*/
if (nms > 0) do_nms_obj(dets, nboxes, l.classes, nms);
printf("\033[2J");
printf("\033[1;1H");
printf("\nFPS:%.1f\n",fps);
printf("Objects:\n\n");
image display = buff[(buff_index+2) % 3];
draw_detections(display, dets, nboxes, demo_thresh, demo_names, demo_alphabet, demo_classes);
free_detections(dets, nboxes);
demo_index = (demo_index + 1)%demo_frame;
running = 0;
return 0;
}
void *fetch_in_thread(void *ptr)
{
int status = fill_image_from_stream(cap, buff[buff_index]);
letterbox_image_into(buff[buff_index], net->w, net->h, buff_letter[buff_index]);
if(status == 0) demo_done = 1;
return 0;
}
void *display_in_thread(void *ptr)
{
show_image_cv(buff[(buff_index + 1)%3], "Demo", ipl);
int c = cvWaitKey(1);
if (c != -1) c = c%256;
if (c == 27) {
demo_done = 1;
return 0;
} else if (c == 82) {
demo_thresh += .02;
} else if (c == 84) {
demo_thresh -= .02;
if(demo_thresh <= .02) demo_thresh = .02;
} else if (c == 83) {
demo_hier += .02;
} else if (c == 81) {
demo_hier -= .02;
if(demo_hier <= .0) demo_hier = .0;
}
return 0;
}
void *display_loop(void *ptr)
{
while(1){
display_in_thread(0);
}
}
void *detect_loop(void *ptr)
{
while(1){
detect_in_thread(0);
}
}
void demo(char *cfgfile, char *weightfile, float thresh, int cam_index, const char *filename, char **names, int classes, int delay, char *prefix, int avg_frames, float hier, int w, int h, int frames, int fullscreen)
{
//demo_frame = avg_frames;
image **alphabet = load_alphabet();
demo_names = names;
demo_alphabet = alphabet;
demo_classes = classes;
demo_thresh = thresh;
demo_hier = hier;
printf("Demo\n");
net = load_network(cfgfile, weightfile, 0);
set_batch_network(net, 1);
pthread_t detect_thread;
pthread_t fetch_thread;
srand(2222222);
int i;
demo_total = size_network(net);
predictions = calloc(demo_frame, sizeof(float*));
for (i = 0; i < demo_frame; ++i){
predictions[i] = calloc(demo_total, sizeof(float));
}
avg = calloc(demo_total, sizeof(float));
if(filename){
printf("video file: %s\n", filename);
cap = cvCaptureFromFile(filename);
//*********rs20180415***********
#ifdef SAVEVIDEO
if(cap){
int mfps = cvGetCaptureProperty(cap,CV_CAP_PROP_FPS); //local video file,needn't change
mVideoWriter=cvCreateVideoWriter("Output.avi",CV_FOURCC('M','J','P','G'),mfps,cvSize(cvGetCaptureProperty(cap,CV_CAP_PROP_FRAME_WIDTH),cvGetCaptureProperty(cap,CV_CAP_PROP_FRAME_HEIGHT)),1);
}
#endif
//*********rs20180415***********
}else{
cap = cvCaptureFromCAM(cam_index);
//*********rs20180415***********
#ifdef SAVEVIDEO
if(cap){
//int mfps = cvGetCaptureProperty(cap,CV_CAP_PROP_FPS); //webcam video file,need change.
int mfps = 25; //the output video FPS,you can set here.
mVideoWriter=cvCreateVideoWriter("Output_webcam.avi",CV_FOURCC('M','J','P','G'),mfps,cvSize(cvGetCaptureProperty(cap,CV_CAP_PROP_FRAME_WIDTH),cvGetCaptureProperty(cap,CV_CAP_PROP_FRAME_HEIGHT)),1);
}
#endif
//*********rs20180415***********
if(w){
cvSetCaptureProperty(cap, CV_CAP_PROP_FRAME_WIDTH, w);
}
if(h){
cvSetCaptureProperty(cap, CV_CAP_PROP_FRAME_HEIGHT, h);
}
if(frames){
cvSetCaptureProperty(cap, CV_CAP_PROP_FPS, frames);
}
}
if(!cap) error("Couldn't connect to webcam.\n");
buff[0] = get_image_from_stream(cap);
buff[1] = copy_image(buff[0]);
buff[2] = copy_image(buff[0]);
buff_letter[0] = letterbox_image(buff[0], net->w, net->h);
buff_letter[1] = letterbox_image(buff[0], net->w, net->h);
buff_letter[2] = letterbox_image(buff[0], net->w, net->h);
ipl = cvCreateImage(cvSize(buff[0].w,buff[0].h), IPL_DEPTH_8U, buff[0].c);
int count = 0;
if(!prefix){
cvNamedWindow("Demo", CV_WINDOW_NORMAL);
if(fullscreen){
cvSetWindowProperty("Demo", CV_WND_PROP_FULLSCREEN, CV_WINDOW_FULLSCREEN);
} else {
cvMoveWindow("Demo", 0, 0);
cvResizeWindow("Demo", 1352, 1013);
}
}
demo_time = what_time_is_it_now();
while(!demo_done){
buff_index = (buff_index + 1) %3;
if(pthread_create(&fetch_thread, 0, fetch_in_thread, 0)) error("Thread creation failed");
if(pthread_create(&detect_thread, 0, detect_in_thread, 0)) error("Thread creation failed");
if(!prefix){
//*********rs20180415***********
#ifdef SAVEVIDEO
save_video(buff[0],mVideoWriter);
#endif
//*********rs20180415***********
fps = 1./(what_time_is_it_now() - demo_time);
demo_time = what_time_is_it_now();
display_in_thread(0);
}else{
char name[256];
sprintf(name, "%s_%08d", prefix, count);
//*********rs20180415***********
#ifdef SAVEVIDEO
save_video(buff[0],mVideoWriter);
#else
save_image(buff[(buff_index + 1)%3], name);
#endif
//*********rs20180415***********
}
pthread_join(fetch_thread, 0);
pthread_join(detect_thread, 0);
++count;
}
}
/*
void demo_compare(char *cfg1, char *weight1, char *cfg2, char *weight2, float thresh, int cam_index, const char *filename, char **names, int classes, int delay, char *prefix, int avg_frames, float hier, int w, int h, int frames, int fullscreen)
{
demo_frame = avg_frames;
predictions = calloc(demo_frame, sizeof(float*));
image **alphabet = load_alphabet();
demo_names = names;
demo_alphabet = alphabet;
demo_classes = classes;
demo_thresh = thresh;
demo_hier = hier;
printf("Demo\n");
net = load_network(cfg1, weight1, 0);
set_batch_network(net, 1);
pthread_t detect_thread;
pthread_t fetch_thread;
srand(2222222);
if(filename){
printf("video file: %s\n", filename);
cap = cvCaptureFromFile(filename);
}else{
cap = cvCaptureFromCAM(cam_index);
if(w){
cvSetCaptureProperty(cap, CV_CAP_PROP_FRAME_WIDTH, w);
}
if(h){
cvSetCaptureProperty(cap, CV_CAP_PROP_FRAME_HEIGHT, h);
}
if(frames){
cvSetCaptureProperty(cap, CV_CAP_PROP_FPS, frames);
}
}
if(!cap) error("Couldn't connect to webcam.\n");
layer l = net->layers[net->n-1];
demo_detections = l.n*l.w*l.h;
int j;
avg = (float *) calloc(l.outputs, sizeof(float));
for(j = 0; j < demo_frame; ++j) predictions[j] = (float *) calloc(l.outputs, sizeof(float));
boxes = (box *)calloc(l.w*l.h*l.n, sizeof(box));
probs = (float **)calloc(l.w*l.h*l.n, sizeof(float *));
for(j = 0; j < l.w*l.h*l.n; ++j) probs[j] = (float *)calloc(l.classes+1, sizeof(float));
buff[0] = get_image_from_stream(cap);
buff[1] = copy_image(buff[0]);
buff[2] = copy_image(buff[0]);
buff_letter[0] = letterbox_image(buff[0], net->w, net->h);
buff_letter[1] = letterbox_image(buff[0], net->w, net->h);
buff_letter[2] = letterbox_image(buff[0], net->w, net->h);
ipl = cvCreateImage(cvSize(buff[0].w,buff[0].h), IPL_DEPTH_8U, buff[0].c);
int count = 0;
if(!prefix){
cvNamedWindow("Demo", CV_WINDOW_NORMAL);
if(fullscreen){
cvSetWindowProperty("Demo", CV_WND_PROP_FULLSCREEN, CV_WINDOW_FULLSCREEN);
} else {
cvMoveWindow("Demo", 0, 0);
cvResizeWindow("Demo", 1352, 1013);
}
}
demo_time = what_time_is_it_now();
while(!demo_done){
buff_index = (buff_index + 1) %3;
if(pthread_create(&fetch_thread, 0, fetch_in_thread, 0)) error("Thread creation failed");
if(pthread_create(&detect_thread, 0, detect_in_thread, 0)) error("Thread creation failed");
if(!prefix){
fps = 1./(what_time_is_it_now() - demo_time);
demo_time = what_time_is_it_now();
display_in_thread(0);
}else{
char name[256];
sprintf(name, "%s_%08d", prefix, count);
save_image(buff[(buff_index + 1)%3], name);
}
pthread_join(fetch_thread, 0);
pthread_join(detect_thread, 0);
++count;
}
}
*/
#else
void demo(char *cfgfile, char *weightfile, float thresh, int cam_index, const char *filename, char **names, int classes, int delay, char *prefix, int avg, float hier, int w, int h, int frames, int fullscreen)
{
fprintf(stderr, "Demo needs OpenCV for webcam images.\n");
}
#endif
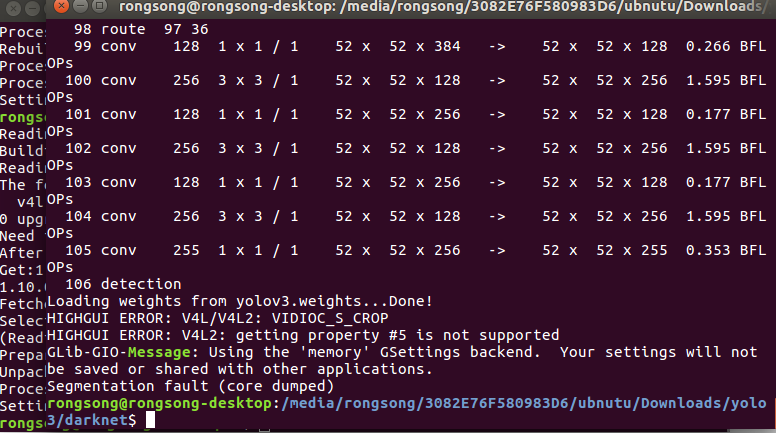
我在运行的过程,碰到了很多问题,比如在通过摄像头实时检测时,遇到了下面这个问题,这个错误不致命,就是可执行检测但是保存不了检测视频,错误提示如下:
HIGHGUI ERROR: V4L/V4L2:VIDIOC_S_CROP
HIGHGUI ERROR: V4L/V4L2:getting property #5 is not supported
GLib-GIOMessage: Using the 'memory' GSettings backend. Your settings will not be saved or shared with other applications.
解决办法:
(1)第一个问题
HIGHGUI ERROR: V4L/V4L2:VIDIOC_S_CROP
HIGHGUI ERROR: V4L/V4L2:getting property #5 is not supported
我自己测试了下,是代码问题,上面给的代码已更改,主要在通过摄像头获取视频帧率时采用了://int mfps = cvGetCaptureProperty(cap,CV_CAP_PROP_FPS); 指令,这样是不行的,测试本地时可以,所以这里给帧率设置了一个常数:int mfps = 25;可以结合demo.c文件对应着看,给了相应的注释。
(2)第二个问题
GLib-GIOMessage: Using the 'memory' GSettings backend. Your settings will not be saved or shared with other applications.
需要添加一个路径,操作如下:
在ubuntu终端执行:
sudo gedit /etc/profile
然后在打开的文件内(需要sudo权限)添加下面内容:
export GIO_EXTRA_MODULES=/usr/lib/x86_64-linux-gnu/gio/modules/
最后是上面的更改立即生效:
source .bashrc
补充:这个程序好像保存出来的视频确实有点点问题,最终的视频是一闪一闪的。暂时解决方案:将被检测视频的每张图片分别保存为单张图片,然后单独合成一个视频就行了(正常),需要两步操作,整合在一起遇到了问题,欢迎交流。
操作:(1)在darket目录下手动新建一个文件夹“picture”,用于存放被检测的单张结果图片。
(2)将图片合成视频,C++和python利用opencv很简单,百度以下都是的。你只需要更改两个文件即可,demo.c与image.c,下载链接为:https://pan.baidu.com/s/14s8vaF4Wac0hJY7S7hbz5A
有问题加我主页微信联系。
补充:20181021,新上传的代码可用。老代码也可用,就是保存的视频有点点闪烁,评论区貌似出现了一个解决方法,大家可以尝试下。(我自己工作了,现在没有这个实验环境)

参考:https://blog.csdn.net/hrsstudy/article/details/60876451