系列文章目录
CARLA pygame window界面大小调节两种方法-Ubuntu18.04
[收藏]CRALA模拟器全网优质学习资料整合[入门-1]
CARLA蓝图库可调用的车辆和地图模型名称大全
如何在carla中加入车辆群[基于traffic manager]
CARLA--车辆添加segmentation语义相机[超详细]--[入门-2]
CARLA--车辆添加环视RGB相机[超详细]--[入门-3]
系列文章目录
前言
一、demo模块说明
二、整体代码
三、效果展示
前言
下面展示一个能在ubuntu18.4上跑通的激光雷达传感器demo,具体可以实现的效果有:
1.实时连续显示激光雷达传感器图像画面
2.可搭载在车上指定位置
3.定义对应的场视角,视角范围为0~360度
4.采集的数据以npy文件格式存储
一、demo模块说明
1.定义对应的数据
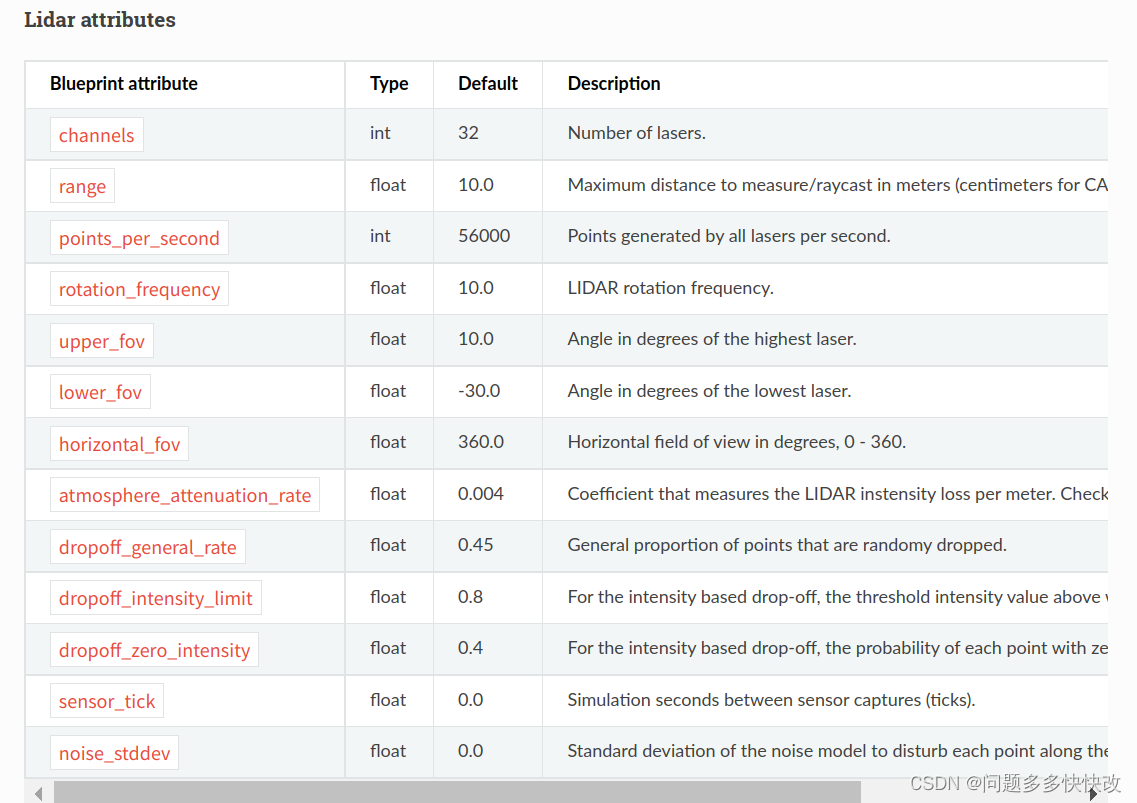
具体说明参考官网说明,这篇给出官网地址:[收藏]CARLA模拟器全网优质学习资料整合[入门-1]
#-------------------------- 进入传感器部分 --------------------------#
sensor_queue = Queue()
lidar_bp = blueprint_library.find('sensor.lidar.ray_cast')
lidar_bp.set_attribute('channels', '64')
lidar_bp.set_attribute('points_per_second', '200000')
lidar_bp.set_attribute('range', '64')
lidar_bp.set_attribute('rotation_frequency','20')
lidar_bp.set_attribute('horizontal_fov', '360')
2.雷达在车上位置定义:
lidar01 = world.spawn_actor(lidar_bp, carla.Transform(carla.Location(z=args.sensor_h)), attach_to=ego_vehicle)
lidar01.listen(lambda data: sensor_callback(data, sensor_queue, "lidar"))
sensor_list.append(lidar01)
#-------------------------- 传感器设置完毕 --------------------------#
3.相机可视化展示:
w_frame = world.get_snapshot().frame
print("\nWorld's frame: %d" % w_frame)
try:
lidars = []
for i in range (0, len(sensor_list)):
s_frame, s_name, s_data = sensor_queue.get(True, 1.0)
print(" Frame: %d Sensor: %s" % (s_frame, s_name))
sensor_type = s_name.split('_')[0]
if sensor_type == 'lidar':
lidar = _parse_lidar_cb(s_data)
cv2.imshow('vizs', visualize_data(lidar))
cv2.waitKey(100)
4.存储数据:
mkdir_folder(args.save_path)
filename = args.save_path +'lidar/'+str(w_frame)+'.npy'
np.save(filename, lidar)
二、整体代码
import glob
import os
import sys
import time
try:
sys.path.append(glob.glob('../carla/dist/carla-*%d.%d-%s.egg' % (
sys.version_info.major,
sys.version_info.minor,
'win-amd64' if os.name == 'nt' else 'linux-x86_64'))[0])
except IndexError:
pass
import carla
import numpy as np
import cv2
from queue import Queue, Empty
import copy
import random
random.seed(0)
# args
import argparse
parser = argparse.ArgumentParser()
parser.add_argument('--host', metavar='H', default='127.0.0.1', help='IP of the host server (default: 127.0.0.1)')
parser.add_argument('--port', '-p', default=2000, type=int, help='TCP port to listen to (default: 2000)')
parser.add_argument('--tm_port', default=8000, type=int, help='Traffic Manager Port (default: 8000)')
parser.add_argument('--ego-spawn', type=list, default=None, help='[x,y] in world coordinate')
parser.add_argument('--top-view', default=True, help='Setting spectator to top view on ego car')
parser.add_argument('--map', default='Town04', help='Town Map')
parser.add_argument('--sync', default=True, help='Synchronous mode execution')
parser.add_argument('--sensor-h', default=2.4, help='Sensor Height')
parser.add_argument('--save-path', default='储存路径', help='Synchronous mode execution')
args = parser.parse_args()
actor_list, sensor_list = [], []
sensor_type = ['lidar']
def main(args):
# We start creating the client
client = carla.Client(args.host, args.port)
client.set_timeout(5.0)
world = client.get_world()
# world = client.load_world('Town01')
blueprint_library = world.get_blueprint_library()
try:
original_settings = world.get_settings()
settings = world.get_settings()
# We set CARLA syncronous mode
settings.fixed_delta_seconds = 0.05
settings.synchronous_mode = True
world.apply_settings(settings)
spectator = world.get_spectator()
# 手动规定
# transform_vehicle = carla.Transform(carla.Location(0, 10, 0), carla.Rotation(0, 0, 0))
# 自动选择
transform_vehicle = random.choice(world.get_map().get_spawn_points())
ego_vehicle = world.spawn_actor(random.choice(blueprint_library.filter("model3")), transform_vehicle)
actor_list.append(ego_vehicle)
# 设置traffic manager
tm = client.get_trafficmanager(args.tm_port)
tm.set_synchronous_mode(True)
# 是否忽略红绿灯
# tm.ignore_lights_percentage(ego_vehicle, 100)
# 如果限速30km/h -> 30*(1-10%)=27km/h
tm.global_percentage_speed_difference(10.0)
ego_vehicle.set_autopilot(True, tm.get_port())
#-------------------------- 进入传感器部分 --------------------------#
sensor_queue = Queue()
lidar_bp = blueprint_library.find('sensor.lidar.ray_cast')
lidar_bp.set_attribute('channels', '64')
lidar_bp.set_attribute('points_per_second', '200000')
lidar_bp.set_attribute('range', '64')
lidar_bp.set_attribute('rotation_frequency','20')
lidar_bp.set_attribute('horizontal_fov', '360')
lidar01 = world.spawn_actor(lidar_bp, carla.Transform(carla.Location(z=args.sensor_h)), attach_to=ego_vehicle)
lidar01.listen(lambda data: sensor_callback(data, sensor_queue, "lidar"))
sensor_list.append(lidar01)
#-------------------------- 传感器设置完毕 --------------------------#
while True:
# Tick the server
world.tick()
# 将CARLA界面摄像头跟随车动
loc = ego_vehicle.get_transform().location
spectator.set_transform(carla.Transform(carla.Location(x=loc.x,y=loc.y,z=15),carla.Rotation(yaw=0,pitch=-90,roll=0)))
w_frame = world.get_snapshot().frame
print("\nWorld's frame: %d" % w_frame)
try:
lidars = []
for i in range (0, len(sensor_list)):
s_frame, s_name, s_data = sensor_queue.get(True, 1.0)
print(" Frame: %d Sensor: %s" % (s_frame, s_name))
sensor_type = s_name.split('_')[0]
if sensor_type == 'lidar':
lidar = _parse_lidar_cb(s_data)
cv2.imshow('vizs', visualize_data(lidar))
cv2.waitKey(100)
# if rgb is None or args.save_path is not None:
# 检查是否有各自传感器的文件夹
mkdir_folder(args.save_path)
filename = args.save_path +'lidar/'+str(w_frame)+'.npy'
np.save(filename, lidar)
except Empty:
print(" Some of the sensor information is missed")
finally:
world.apply_settings(original_settings)
tm.set_synchronous_mode(False)
for sensor in sensor_list:
sensor.destroy()
for actor in actor_list:
actor.destroy()
print("All cleaned up!")
def mkdir_folder(path):
for s_type in sensor_type:
if not os.path.isdir(os.path.join(path, s_type)):
os.makedirs(os.path.join(path, s_type))
return True
def sensor_callback(sensor_data, sensor_queue, sensor_name):
# Do stuff with the sensor_data data like save it to disk
# Then you just need to add to the queue
sensor_queue.put((sensor_data.frame, sensor_name, sensor_data))
# modify from world on rail code
def visualize_data(lidar, text_args=(0.6)):
lidar_viz = lidar_to_bev(lidar).astype(np.uint8)
lidar_viz = cv2.cvtColor(lidar_viz,cv2.COLOR_GRAY2RGB)
return lidar_viz
# modify from world on rail code
def lidar_to_bev(lidar, min_x=-100,max_x=100,min_y=-100,max_y=100, pixels_per_meter=4, hist_max_per_pixel=2):
xbins = np.linspace(
min_x, max_x+1,
(max_x - min_x) * pixels_per_meter + 1,
)
ybins = np.linspace(
min_y, max_y+1,
(max_y - min_y) * pixels_per_meter + 1,
)
# Compute histogram of x and y coordinates of points.
hist = np.histogramdd(lidar[..., :2], bins=(xbins, ybins))[0]
# Clip histogram
hist[hist > hist_max_per_pixel] = hist_max_per_pixel
# Normalize histogram by the maximum number of points in a bin we care about.
overhead_splat = hist / hist_max_per_pixel * 255.
# Return splat in X x Y orientation, with X parallel to car axis, Y perp, both parallel to ground.
return overhead_splat[::-1,:]
# modify from leaderboard
def _parse_lidar_cb(lidar_data):
points = np.frombuffer(lidar_data.raw_data, dtype=np.dtype('f4'))
points = copy.deepcopy(points)
points = np.reshape(points, (int(points.shape[0] / 4), 4))
return points
if __name__ == "__main__":
try:
main(args)
except KeyboardInterrupt:
print(' - Exited by user.')
三、效果展示

