相机标定的概念
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定。
三维场景所在的坐标:世界坐标
二维照片中每个像素点所在坐标:像素坐标
相机标定求解的参数:从世界坐标系转换为像素坐标系的转换关系
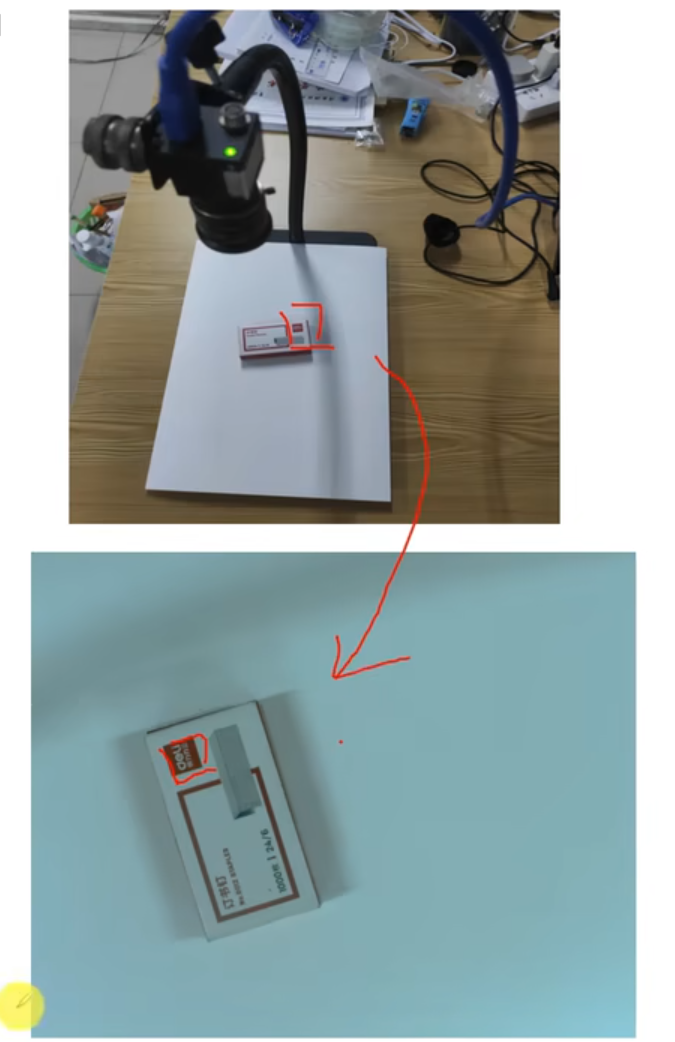
通过相机标定可以校正:由相机位置和被拍摄物体位姿不平行导致的畸变
相机标定完成:转换关系、消除畸变
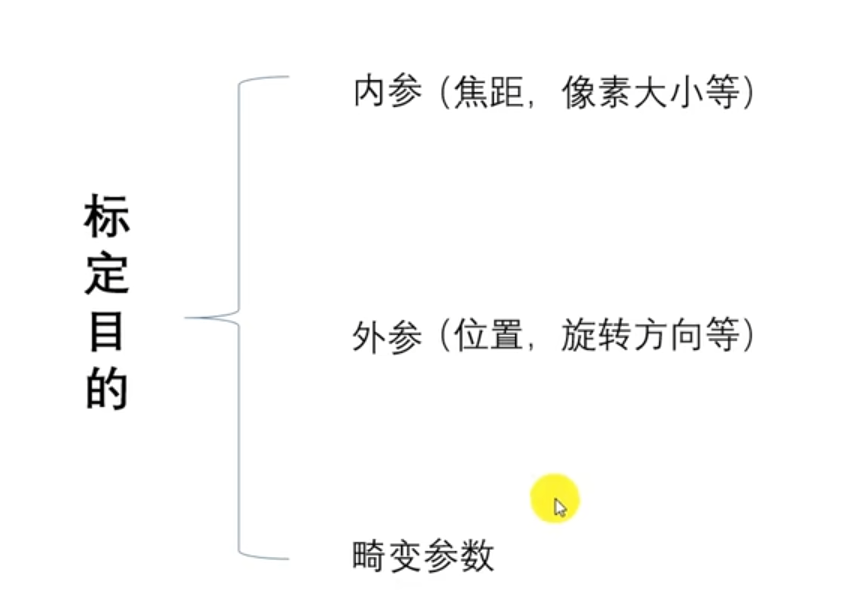
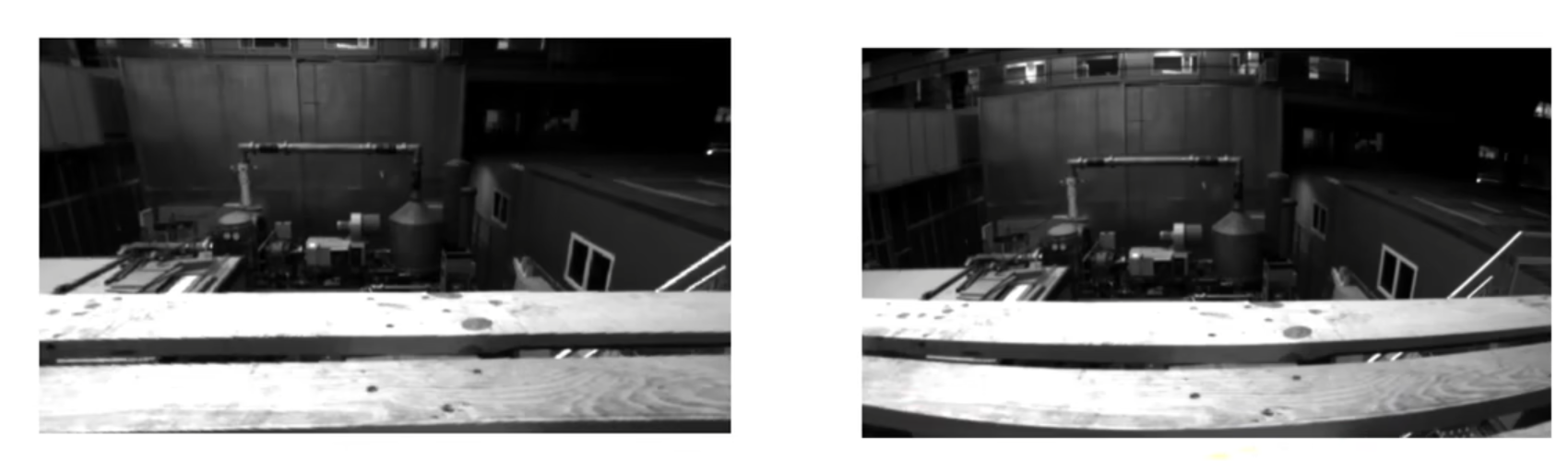
相机的畸变


相机位置和被拍摄物体位姿关系产生的误差
透镜和成像平面(CMOS)不完全平行
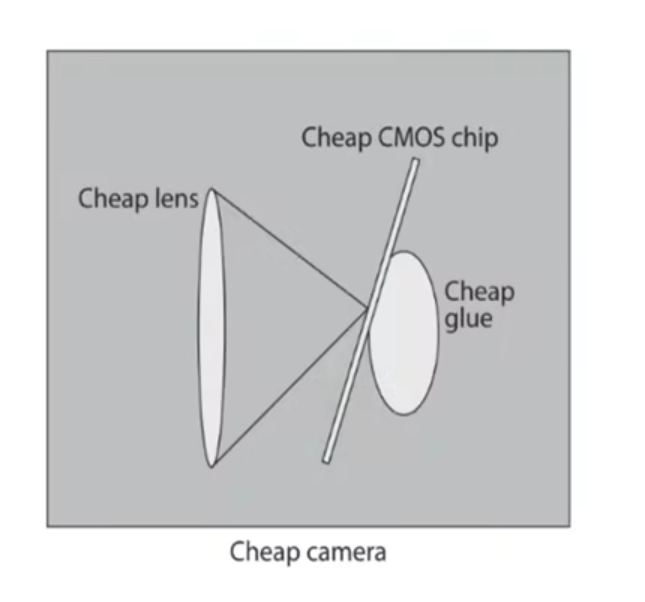
内参解决
镜头和被拍摄物体不完全平行
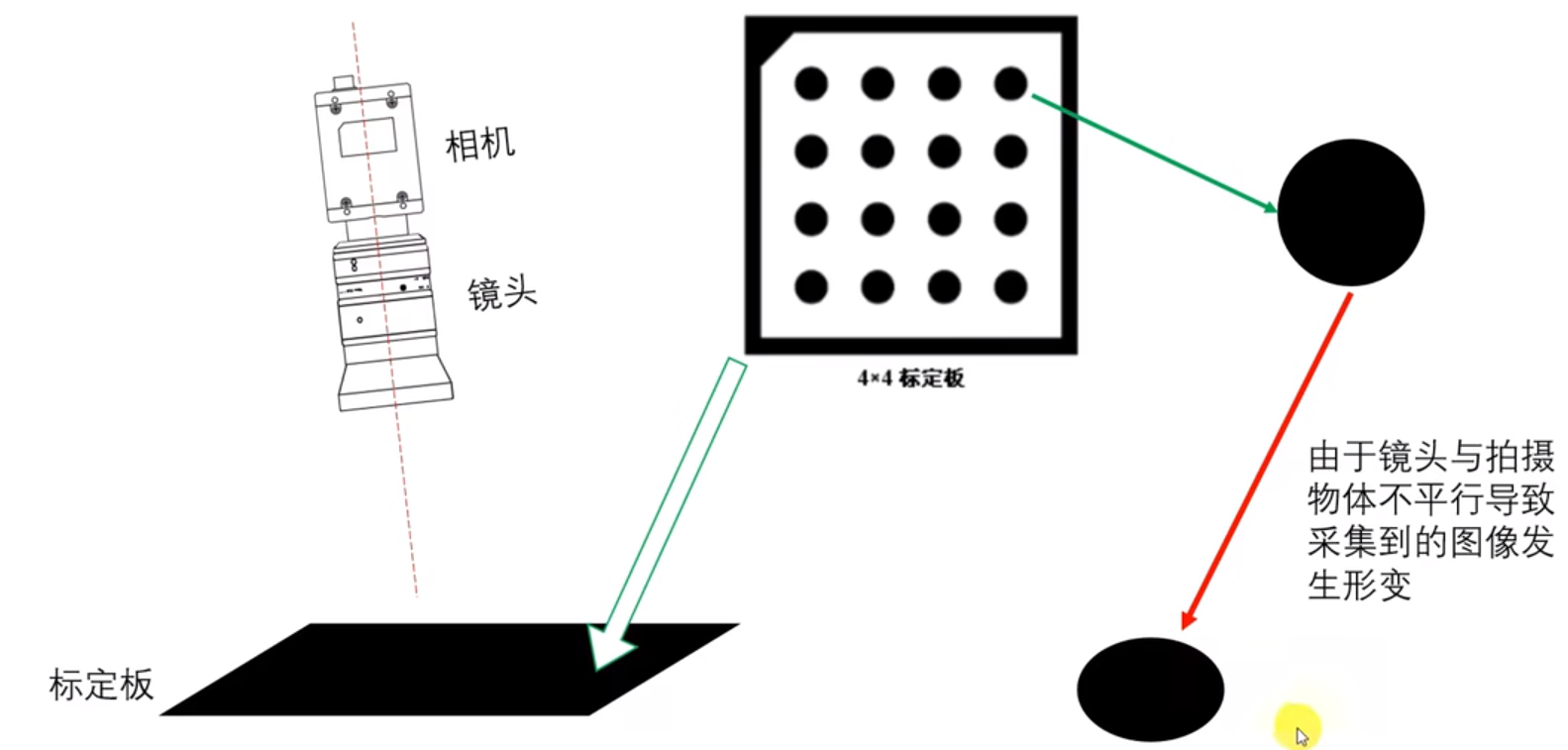
外参解决
标定板

相机标定过程

生成标定板
gen_caltab (7, 7, 0.0125, 0.5, 'caltab.descr', 'caltab.ps')
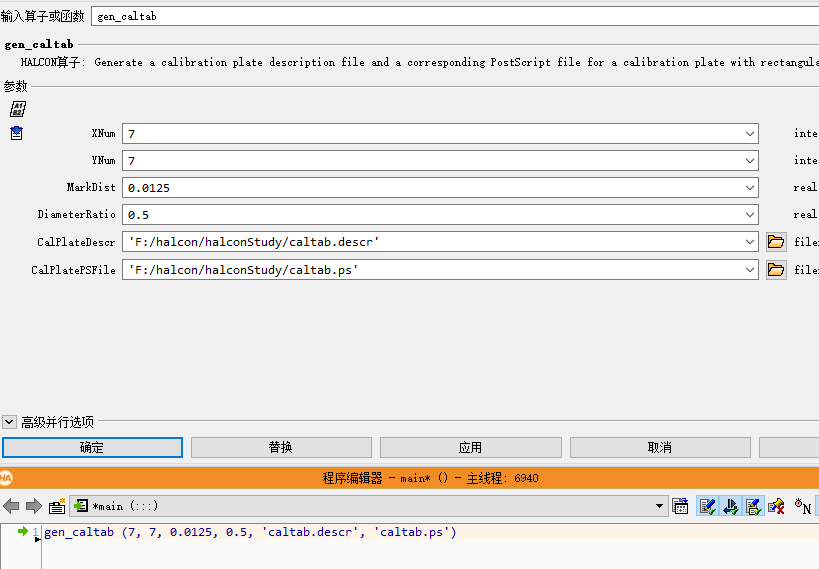
gen_caltab (7, 7, 0.0125, 0.5, 'F:/halcon/halconStudy/caltab.descr', 'F:/halcon/halconStudy/caltab.ps')
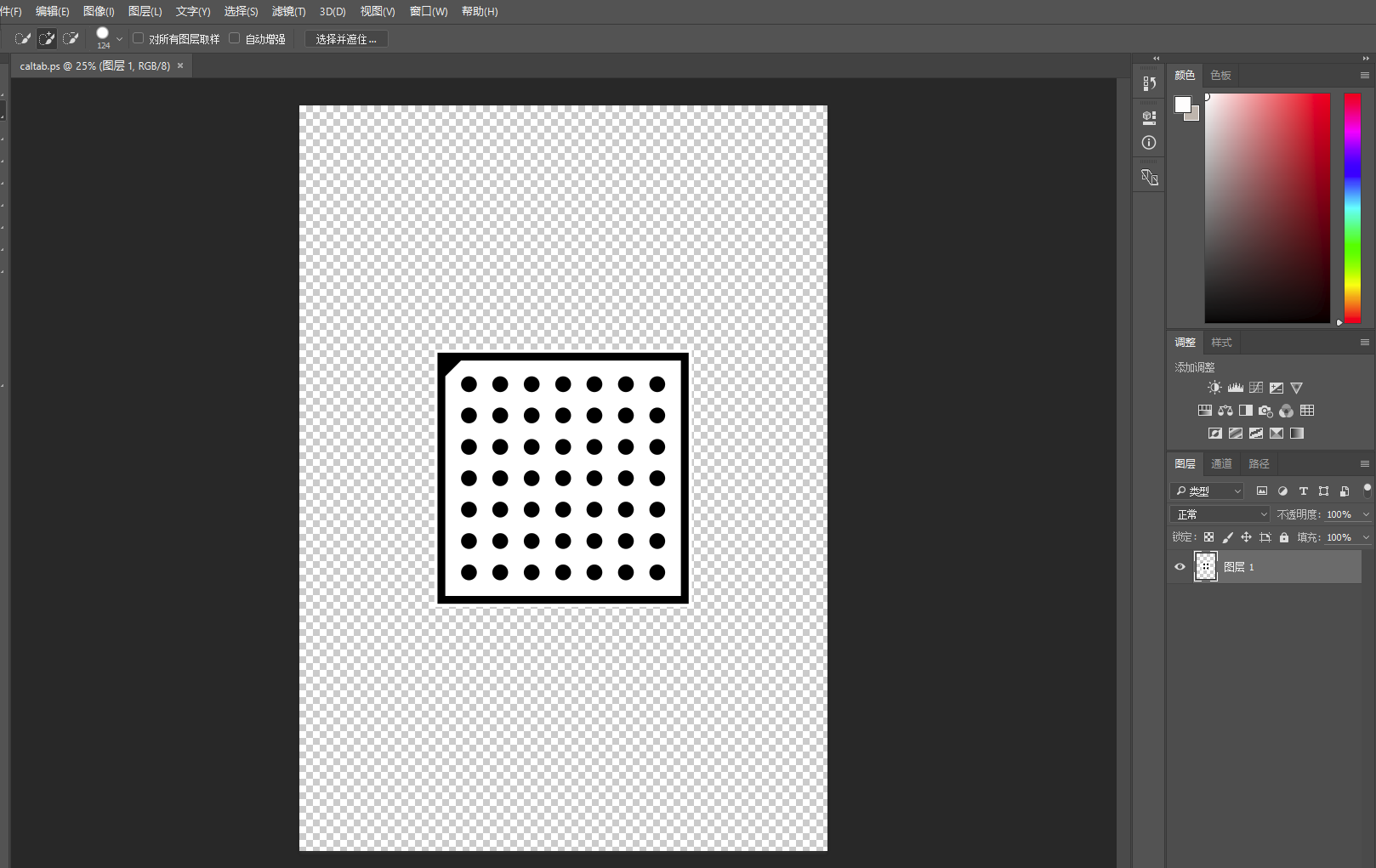
打印这个文件。。并使用相机拍摄。。。
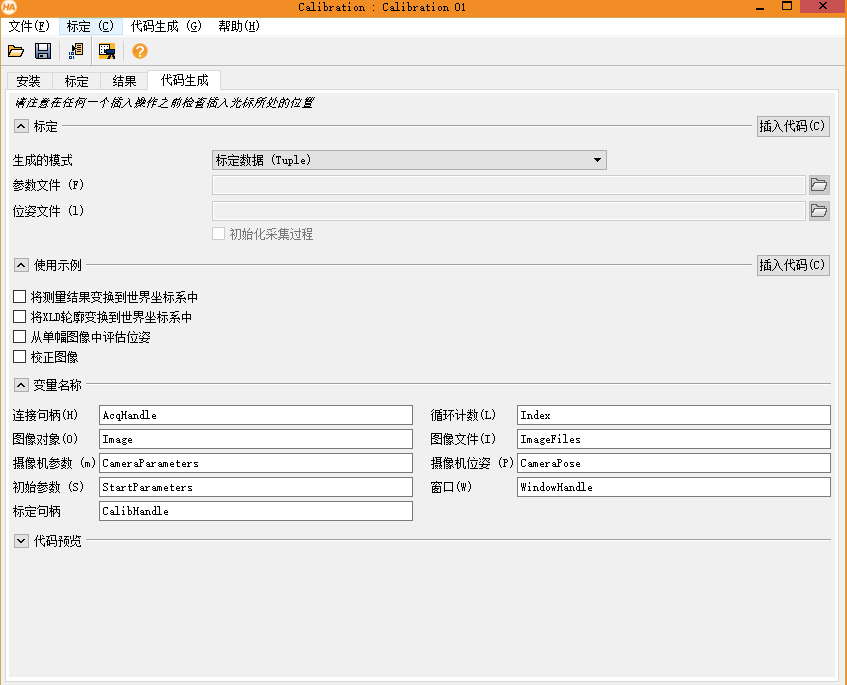
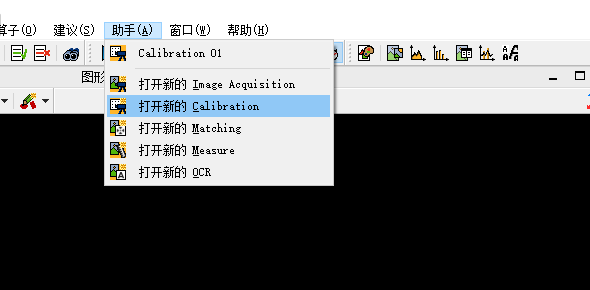
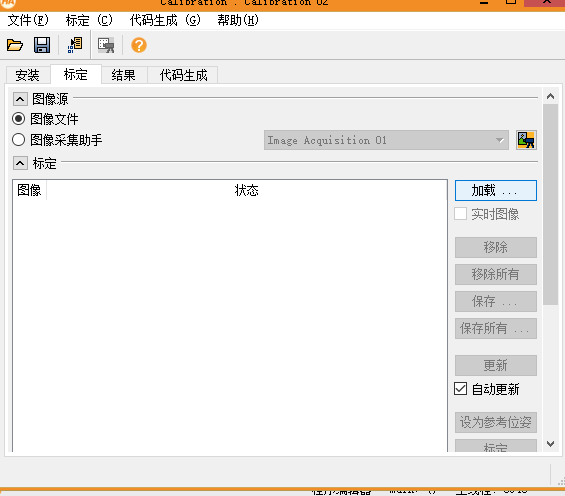
使用标定助手
相机拍摄的图片保存在了:F:\halcon\halconStudy\相机标定

填写相机焦距等参数

加载图片
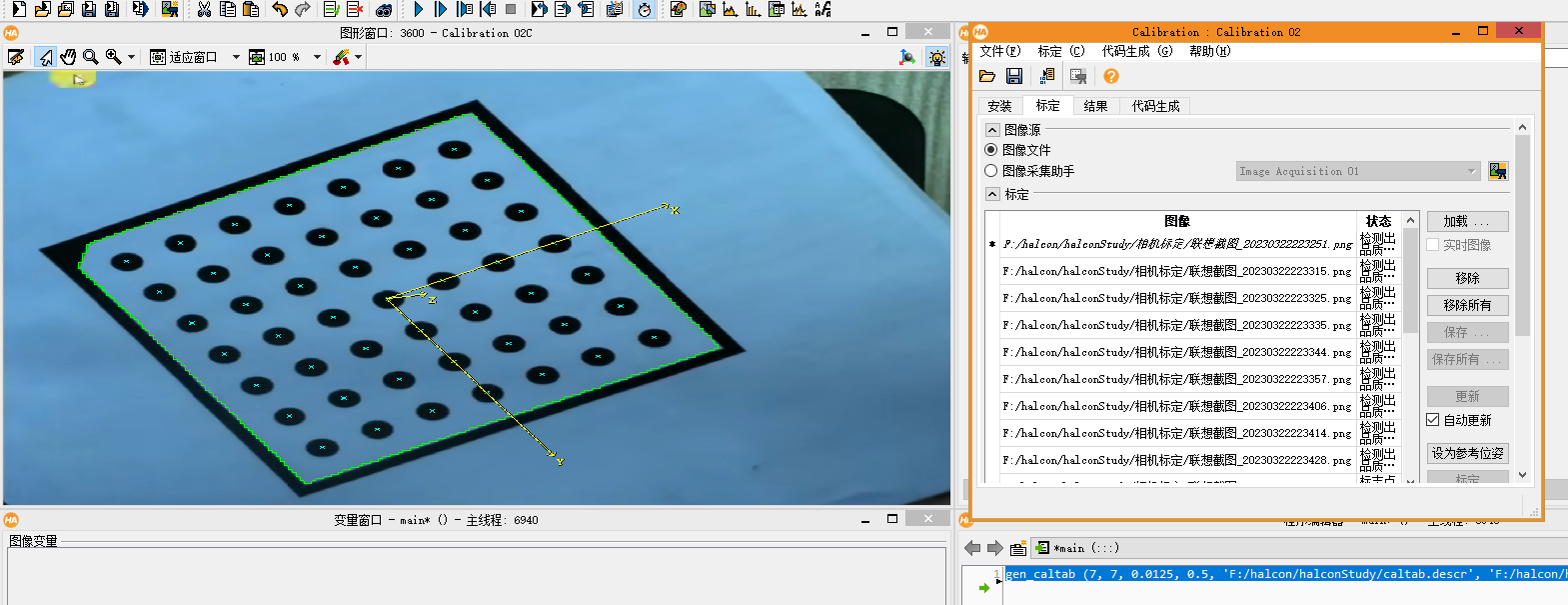
品质都有问题。。。
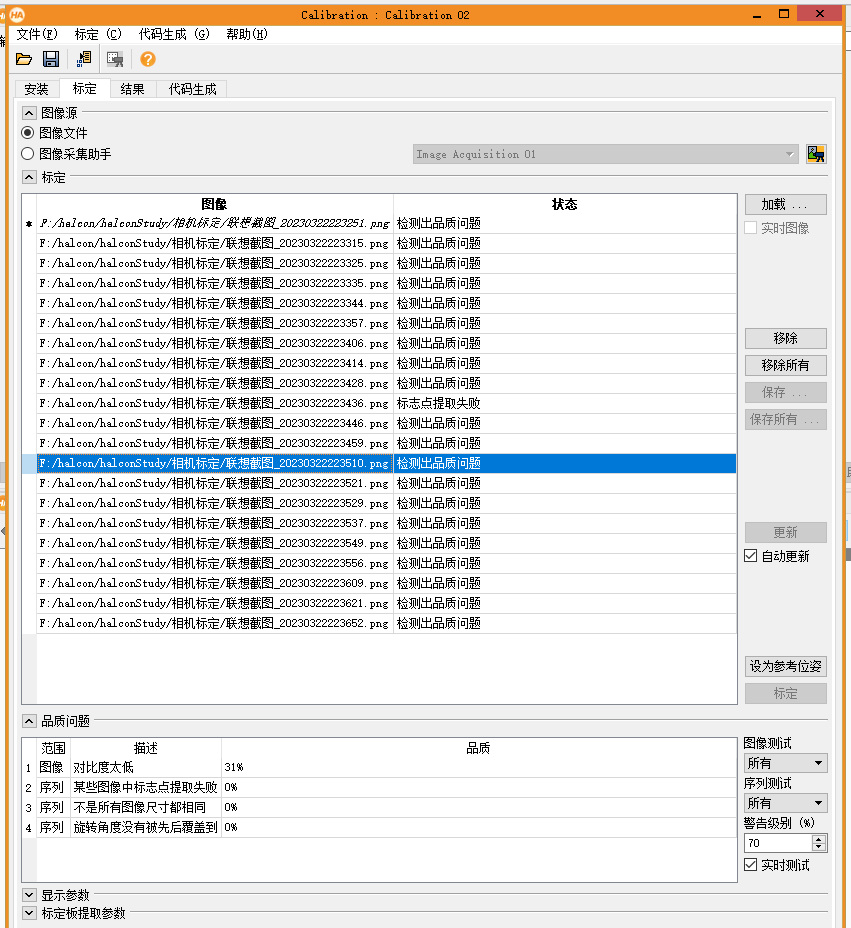
重新拍摄,直到没有问题。。
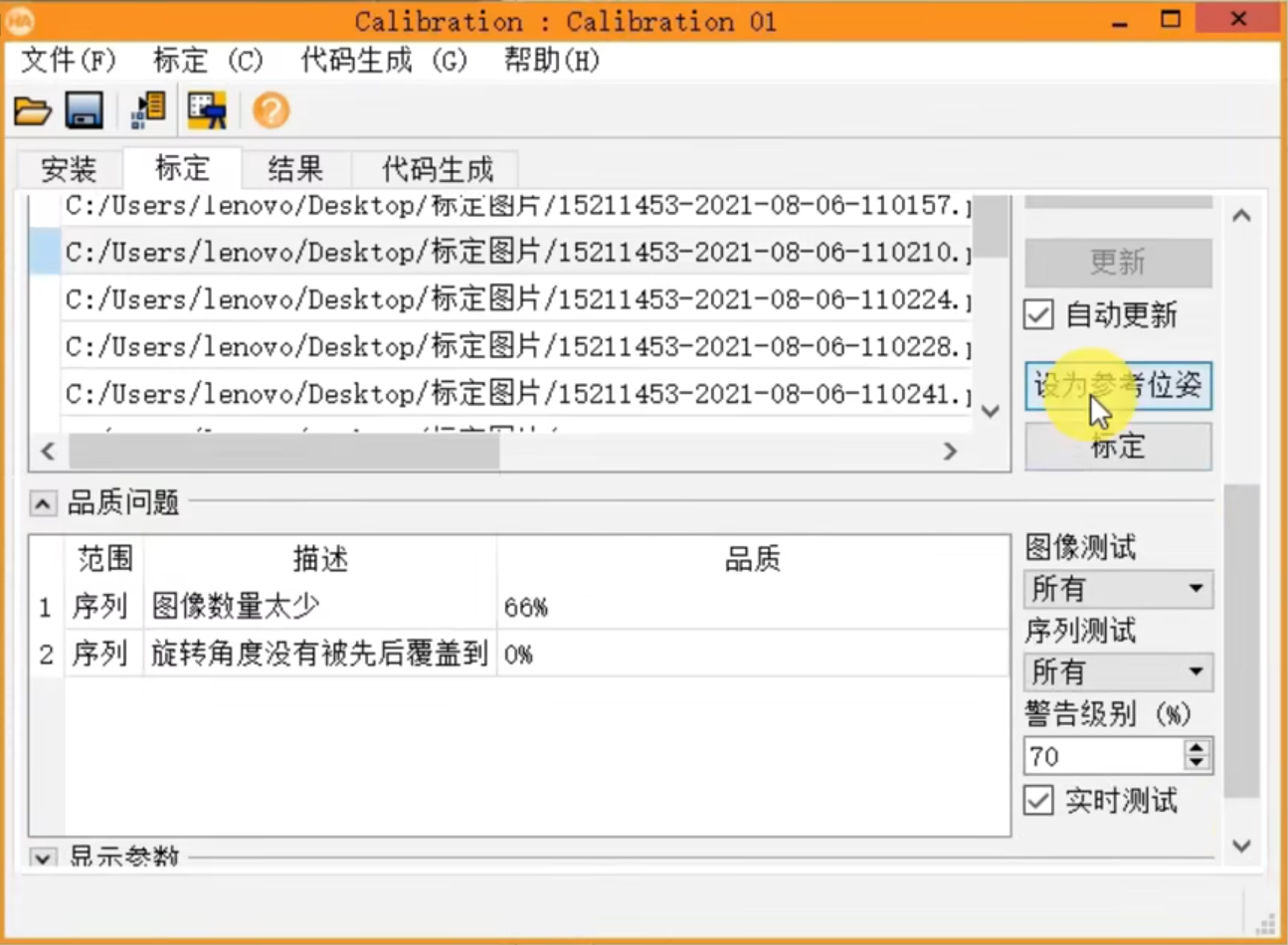
将比较正的照片设置为参考位姿,然后标定
标定结果
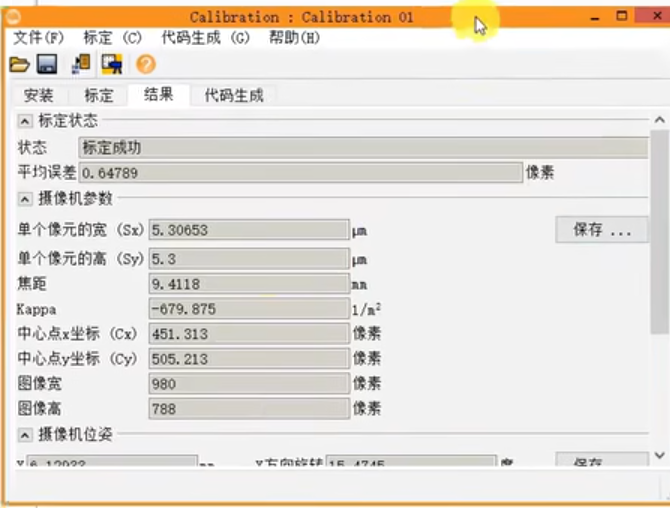
摄像机参数:内参
摄像机位姿:外参
畸变系数:Kappa
最后,插入代码