一、串行通信的基本概念
1.同步通信和异步通信
- 通信,最少要两个对象,一个收,一个发
- 同步通信:通信双方根据同步信号进行通信的方式。
- 异步通信:数据传输速度匹配依赖于通信双方有自己独立的系统时钟,大家约定好通信的速度。异步通信不需要同步信号,但是并不是说通信的过程不同步
2.串行通信和并行通信的区别
- 串行通信:同一时刻只能收或发一个bit位信息因此只用1根信号线
- 并行通信:同一时刻可以收或发多个bit位的信息,因此需要多根信号线才行
3.单工、半双工、全双工
- 单工:要么收,要么发,只能做接收设备或者发送设备
- 半双工:可以收,可以发,但不能同时收发
- 全双工:可在同一时刻既接收,又发送
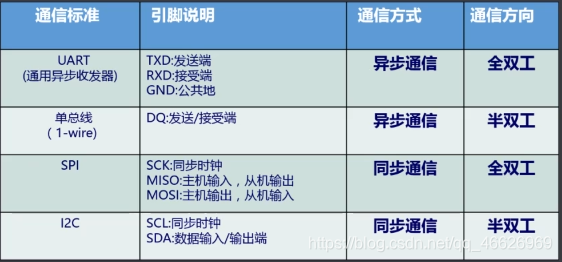
4.常见通信总结
二、串口设置步骤
- 串口时钟使能,GPIO 时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1);
- 串口复位
void USART_DeInit(USART_TypeDef* USARTx);
- GPIO 端口模式设置
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
- 串口参数初始化
void USART_Init(USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct);
- 开启中断并且初始化 NVIC(如果需要开启中断才需要这个步骤)
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);
void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT, FunctionalState NewState);
- 使能串口
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState);
- 编写中断处理函数
void USARTx_IRQHandler();
- 串口数据发送
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data);
uint16_t USART_ReceiveData(USART_TypeDef* USARTx);
- 串口传输状态获取
FlagStatus USART_GetFlagStatus(USART_TypeDef* USARTx, uint16_t USART_FLAG);
void USART_ClearITPendingBit(USART_TypeDef* USARTx, uint16_t USART_IT);
三、初始化
void uart_init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority= 3 ;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_InitStructure.USART_BaudRate = bound;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_Cmd(USART1, ENABLE);
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)