原链接: https://community.bwbot.org/topic/518
运行测试平台:小强ROS机器人
1. 安装CUDA
1.1 禁用原有的驱动
如果你之前安装了nvidia的开源驱动,即通过apt-get 安装的驱动。则需要先把开源驱动禁用掉。
lsmod | grep nouveau
sudo gedit /etc/modprobe.d/blacklist-nouveau.conf
blacklist nouveau
options nouveau modeset=0
sudo update-initramfs -u
然后再官网下载CUDA安装文件,推荐下载.run的文件
1.2 进入文本模式,禁用图像显示
下载完成后同时按下 Ctrl + Alt + F1进入文本模式,按照提示登入用户名密码。
然后执行下面指令关闭图形界面
sudo service lightdm stop
1.3 安装CUDA
执行
sudo sh cuda_9.2.148_396.37_linux.run
根据安装过程的提示进行安装,一般默认就可以了。推荐安装上自带的驱动,防止自己安装驱动版本对不上。
1.4 设置环境变量
安装完成之后会提示设置环境变量,根据提示设置就可以了
在.bashrc文件中添加下面的内容
export PATH=/usr/local/cuda/bin:$PATH
export LD_LIBRARY_PATH=/usr/local/cuda/lib64
1.5 测试一下
bash
nvcc -V
正常应该会显示出CUDA的版本信息。
2. 下载安装SDK
从官方下载SDK
执行
chmod +x zed_sdk_file
./zed_sdk_file
按照提示安装就可以了
3. 运行测试程序
cd /usr/local/zed/tools
./ZED\ Depth\ Viewer
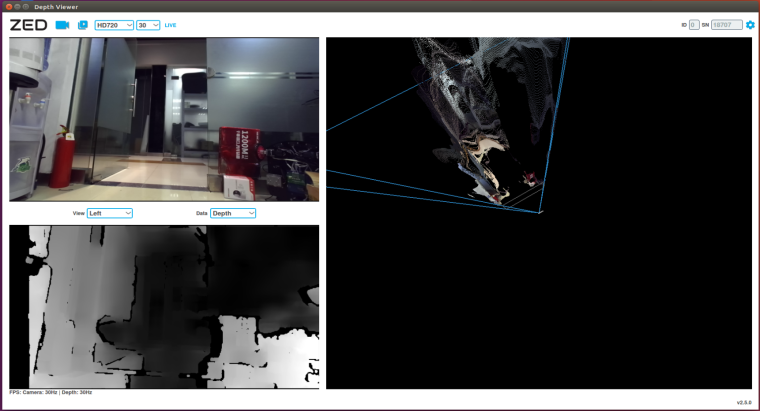
一切正常应该可以看到下图所示的画面。
4. 安装ROS驱动
cd [to your workspace]/src
git clone https://github.com/stereolabs/zed-ros-wrapper
cd ..
catkin_make -DCATKIN_WHITELIST_PACKAGES="zed_wrapper"
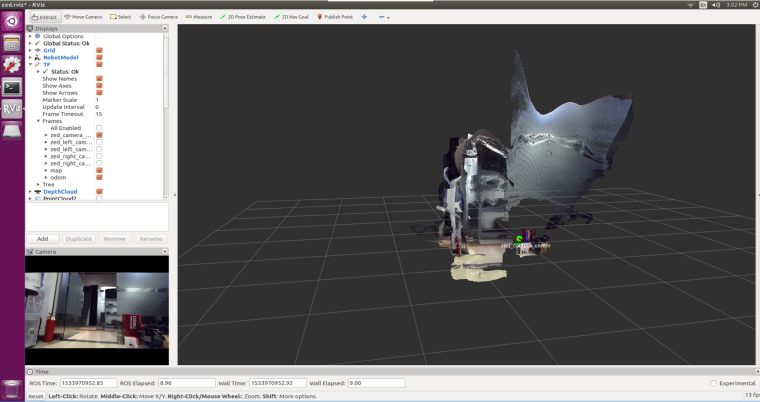
5. 测试ROS驱动
等待编译完成
roslaunch zed_display_rviz display.launch
正常即可看到下面的显示了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)