说明
关于MIMO(Multiple-Input Multiple-Output,多发多收)就不做过多介绍了,MIMO技术用于车载毫米波雷达主要的目的是增加虚拟通道,以期使用较少的收发天线数量来达到较大的天线孔径,从而得到更高的角度分辨率。MIMO技术用于车载毫米波雷达主要涉及两个问题:一是阵列如何设计,二是天线如何发射。阵列的设计还与测角算法等有关,我会在另外的博文中一并给出,本篇博文主要探讨MIMO下天线的发射问题。
本篇博文会基于对这方面知识理解的加深以及读者的反馈长期更新内容和所附资料,有不当之处或有其它有益的参考资料可以在评论区给出,我们一起维护,我会定期完善。
Blog:
20220920 文章第一次写作,本次写作主要内容来源于Ti的相关资料以及一些文献,在最后的参考资料中有列出。
文章架构
目录
说明
文章架构
一、MIMO发射问题概述
二、几种常见的MIMO发射模式(长期更新)
A、TDMA
B、BPMA
C、DDMA
D、PMCW
三、总结
四、参考资料
一、MIMO发射问题概述
车载毫米波雷达MIMO体制下的天线发射问题是一个比较棘手的问题,因为其中涉及到通道分离、发射增益考量、实时性要求、内存需求以及芯片功能的可实现性等诸多方面,MIMO发射模式的选取是各因素综合考虑后的结果。
MIMO的发射模式有很多,包括但不限于:TDMA_MIMO(time division multiple access 时分)、BPM_MIMO(binary phase modulation 二进制相位调制)、DDMA_MIMO(doppler diversity multiple access 多普勒频分多址)、FDMA_MIMO(frequency division multiple access 频分多址)等。这些发射模式各有优劣,其核心区别在于通道分离的实现方式不一样,我们可以将之简单分成两类:要么发射天线分开发射(一次只有一个发射天线在发射电磁波),要么所有的发射天线同时发射。分开发射也即前面的TDMA,这是最常见也是最容易理解且使用最多的发射方法,TDMA是在发射层面就实现了通道的分离,但是这种方式随着MIMO发射天线数量的增加有不断被放大的劣势,使之难以用于4D雷达等发射天线数量增加了的产品中,具体的将在后文展开。而包括BPM、DDMA、FDMA等都属于所有发射同时发射的情况,这种发射方法下就需要在接收层面进行分离,由在接收层面分离原理的不同倒推而有了发射机制的差异,这些方法也各有优劣。
本篇博文将在第二章选取其中的几种发射模式,详述其发射机制、通道分离的原理以及优缺点等。第二章的内容会随着对各种发射模式理解的加深、对一些新的实用性发射模式的认识而不断更新和丰富,也希望读者在评论区分享一些新的想法和资料。
二、几种常见的MIMO发射模式(长期更新)
备注:上述提及的发射方式,有一些在现有的毫米波雷达芯片上是没法实现的(比如FDMA需要同时发射不同起始频率的chirp信号),后文给出的发射模式暂时限于现阶段硬件上容易实现的。后文对发射模式的说明主要从:如何发射、如何分离、优缺点、存在的主要问题及其解决办法这几个方面展开。
A、TDMA
发射与分离
时分MIMO通过发射时间上的分离来实现通道分离,以两个发射天线的情况为例:
TDMA发射原理示意图(两个发射天线)
两个发射天线前后交替发射,且前后两chirp需要严格保持一致(包括chirp的带宽和周期,因为需要保证各通道得到的数据在距离和多普勒维度的一致性才能做后续CFAR前的累积和测角),对于Nt个发射天线的情况,发射方式可类比上述。
TDMA的通道分离也很好理解,比如单帧下要求每个通道的多普勒维度有64个chirp,那么单个发射天线单帧下需要发射64次,单帧下雷达一共需要发射64*Nt个chirp,再假设单个chirp下接收端采样了256个点,则每个接收天线将收集到256*(64*Nt)的数据矩阵,假设256对应为行,64*Nt对应为列,则列中每隔(Nt-1)的列为同一个发射天线发射的chirp对应的接收信号,我们只需将对应位置的列取出来构成该通道下的接收数据矩阵即可,假设有Nr个接收天线,那么我们可以得到Nt*Nr个256*64大小的数据矩阵,此时便也完成了通道分离。(注:这里与各SOC芯片厂家中芯片内部实际的数据处理方式可能有一些出入,但是TDMA的数据分离原理可以基于前面的叙述进行理解。)
优缺点
TDMA部分主要探讨一下这种发射模式下的优劣:
TDMA这种发射模式优势很突出:通道分离十分简单(或者说根本不需要在后端做数据分离的操作)、芯片层面上也很容易实现(因为单帧内所有发射天线发射chirp的一致性,只需要一个本振源加上时序的控制即可)。所以现阶段TDMA是使用最广泛也是各厂家的射频芯片都支持的发射模式。
但是其缺点也明显,且随着发射天线数量的增加,这些缺点会被“成倍”地放大乃至丢失了其可实用性。其缺点主要有以下几个方面:
1、没有充分利用发射资源:
TDMA下同一时刻只有一个发射天线在工作,其余的都处在闲置状态,所以相较于所有天线同时发射的模式,后者的SNR有10*log10(Nt) dB的提升。
2、后端需要的内存资源与发射天线成正比:
如前所述,单帧下,Nt个发射天线与Nr个接收天线在后端会存有Nt*Nr*Nadc*Nchirps个ADC数据,Nadc是单chirp下adc的每个接收通道ADC的采样点数,Nchirps是单帧下单个天线发射的chirp数。我们可以基于ADC的分辨率大小很容易计算得到所需的内存大小。且从公式中可以看到,随着发射天线数量的增加,内存值也会增加。当然,如何在不改变雷达性能的前提下减少数据量更多的是压缩感知(稀疏阵等)中需要去研究的课题,但是在选择发射模式时也需将内存资源一并考虑进去(从目前了解到的方法来看,后续给出的几种发射模式如果使得通道分离后的多普勒维度一致,似乎内存大小都需要这么多,这里暂且不做更深入的探讨)。
3、PRF降低导致最大无模糊测速范围下降:
雷达的最大无模糊测速范围有公式:Vmax=±λ4*Tc ,式中λ为波长,Tc为单天线发射的相邻两chirp之间的时间间隔。PRF为pulse repetition frequency即脉冲重复频率,这里PRF = 1/Tc,我们假设单chirp的周期为T_chirp,从前述对TDMA发射机制的说明可以知道,如果阵列中只有一个发射天线,那么Tc = T_chirp,而如果阵列中有Nt个发射天线,此时Tc = Nt*T_chirp,PRF降低为原来的1/Nt,最大无模糊速度也将降低为原来的1/Nt。最大无模糊测速范围会随着发射天线数量增加而减小,但车载雷达对测速范围有一定的要求(一般需要在±200kph以上),所以一般使用了超过2个Tx的TDMA,速度解模糊成了一个必须要做的工作。这加重了后端处理算法的复杂度。(TDMA这里的速度解模糊与否不影响对TDMA的理解,暂时不在本博文的讨论范围之内,后续我会出一篇相关的博文专题讨论车载毫米波雷达信号处理中的模糊问题,包括速度和角度模糊)。
4、测角前需要做相位补偿:
雷达的DOA依赖于目标反射信号在天线阵列各个通道上的相位差(w = 2*pi*d*sin(θ)/λ,这是相邻两通道之间的相位差值计算公式,其中d为阵元之间的间距,θ为目标角度)。但是当目标有速度时,不同的发射天线因为发射的chirp信号有时间上的差异(先后发射的),从而导致不同的发射天线对应的接收通道之间会引入目标速度引起的额外的相位差值:w' = 2*pi*fdoppler*Tchirp,Tchirp是chirp周期(或前后两发射天线发射chirp的间隔),下面是一个2T4R的示意图:

TDMA下速度导致不同发射天线对应接收通道的相位变化示意图
如上图所示,Tx1对应的接收通道相位中增加了w',于是在测角之前,在测得目标准确的速度这一前提下需要把增加的相位w' 减去(注意这里是对不同的发射天线对应的接收通道的补偿,每个发射天线对应的接收通道其补偿值是一样的),如果不做相位补偿会导致测角结果不准确。
5、补充说明
因为TDMA下更方便理解,这里籍此讨论两个随着天线数量的增加而产生的问题(这两个问题不管是什么发射模式,随着天线数量的增加都会存在)。随着发射天线数量的增加会带来的问题: 实时性受到影响以及在实际应用中因速度的存在导致该目标在RD图中出现在了不同的距离门里。
这里以TDMA为例,分析这两问题的产生(事实上不同的发射模式单帧下如果一个通道的多普勒维度一样,那么发射的总chirp数也是一样的,所以都会有这里问题的产生)。车载毫米波雷达对单帧的数据更新率是有要求的:一般取20Hz(或50ms)左右,雷达需要在这50ms的时限内完成包括发射、接收、数据处理(测距测速测角、聚类与跟踪)、甚至后处理(一些简单的ADAS功能的实现)全部的流程,并将数据通过CAN给到汽车,试想单chirp的周期为35微秒(该值是一个比较小的值了),单帧下多普勒维度需要64个chirp,一共有12个发射天线,则此时用在发射上的时间为:35*64*12(微秒) = 26.88ms,光把所有的chirp发射出去就需要用一半的时间,如果要保证50ms更新周期,这无疑给后端的处理流程带来了很大的压力,且随着发射天线数量的增加,TDMA所需的发射时长会更多。
此外,实用场景中目标车辆可能处在高速运动的状态,试想车速为33m/s(对应120kph的时速),天线的发射参数与前述一致,那么对于同一个发射天线其第一个chirp和最后一个chirp之间的时间间隔为:35*12*64(微秒) = 0.027s,目标车辆在此期间行驶了33*0.026 = 0.86m,对于带宽较大(距离分辨率较高)的雷达系统,这两个chirp下得到的测距结果已经不在同一个距离门里了,这无疑会给后续的数据处理带来很大麻烦(导致虚假目标的产生或测角结果不准确等?),随着发射天线数量的增加以及chirp周期的增加这一影响会愈发凸显。
B、BPMA
发射与分离
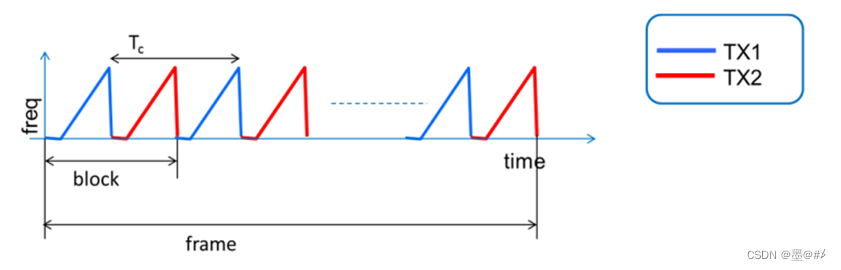
BPMA下所有的天线同时发射,对每个发射天线的发射相位进行编码(相位只在0°和180°之间选择),并在后端进行解码来实现通道分离。对于Nt个发射天线的场景,Nt个发射天线发射Nt次的chirp作为一个block,该block可以等效为TDMA中单个发射天线发射的一个chirp,也即如果单个通道在多普勒维度需要M个chirp,那么需要发射M个block。以两个发射天线场景为例:

2个发射天线以BPMA模式发射时 示意图
上图中1和-1表示发射相位互为反相,每两次发射作为一个block,单个接收天线对于这一个block会得到两组数据Sa和Sb,在接收端我们再基于公式:S1 = (Sa+Sb)/2; S2 = (Sa-Sb)/2 分离出两个发射天线对应的两个通道的数据(此时的S1和S2对应为TDMA下两天线分时发射时对应的两通道的信号),以此类推,单个通道多普勒维度的需求有多少,就需要发射多少的block。
优缺点
从上面的说明不难理解,BPMA相较于TDMA最大的改善在于利用了全部的发射资源,所以其发射增益有10*log10(Nt) dB的增加,此外因为天线是同时发射的,所以在后端测角前不需要做发射时序引起相位补偿。但是这种方式并没有解决PRF下降导致最大无模糊测速范围降低的问题(因为一个block对应为TDMA中单通道的一个chirp,则BPMA单通道前后两个chirp之间的时间间隔仍然为Nt*Tc,Tc为单次发射时的chirp周期),数据量也没有下降。
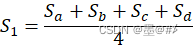
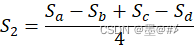
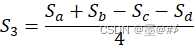
此外值得注意的两个问题是:1、通道的分离我们可以在DOA前的任何步骤时做。2、BPMA的编码应该是一个哈达玛矩阵,这就要求当发射的天线数Nt > 4时,Nt必须是4的倍数。对于4发的应用场景,其发射编码应该为:

Sa---Sd为接收到的信号,S1---S4为分解后的信号,其解码方式为:

BPMA相较于TDMA有一定的优势,且实现起来对硬件的要求低,但是其编码对发射天线的数量有要求,且数量增加后解码繁琐。
C、DDMA
备注:DDMA貌似有很多种?有从发射天线频率上设置差异达到分离目的的,也有从相位上设置差异达到分离效果的。本小节主要基于Ti发布的最新款的AWR2944毫米波雷达芯片对DDMA的说明和使用来展开。
发射与分离
DDMA发射模式下,每帧下所有发射天线同时发射,且每个发射天线的起始chirp相位都为0(或者某一固定值),每个发射天线的前后chirp之间偏移一个特定的相位值(且相互之间不一样),通过该人为设置的偏移相位使不同发射天线的信号在 Doppler 域上能分离开来。因为对于测速,有公式:
式中Tc是相邻两chirp之间的时间间隔(或chirp周期),当相位只由速度引起时,上述公式成立,如果人为在前后chirp间加入一个固定的相位差∆φ',该相位差的存在会导致速度产生偏移(∆φ---> ∆φ + ∆φ'),且可以看到不同的∆φ'会有不同的速度偏移量,在距离多普勒图上可以产生的效果如下:
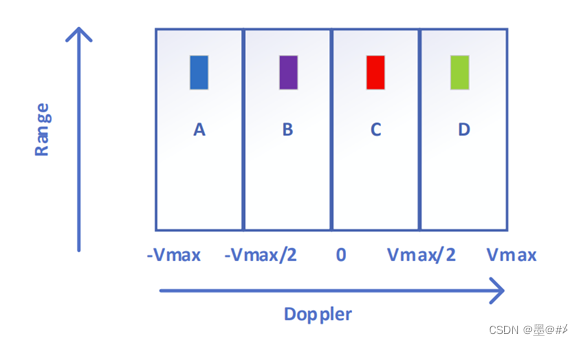
DDMA发射模式下,RD图中目标效果示意图(4发天线)
DDMA 波形下,同一个目标在不同发射天线的信号照射下所形成的回波中,检测到的速度值因对各个发射天线设置的相位偏移值的不同而不同,于是在同一个距离门下会被压缩到不同的多普勒区域中。我们正是利用这一信息将目标在接收端分离出来。假设有Nt个发射天线,那么对于第K个发射天线,该天线相邻chirp之间的相位偏移值可以设置为:
Wk= 2Π(K-1)/Nt k = 1,…, Nt
也即,对于第K个发射天线,其发射的chirp相位初始值应该是:
0 Wk 2Wk 3Wk …
以上解释了如何发射DDMA以及DDMA下在RD图上产生的效果,在后续的测角操作中,我们只需将这四个位置对应的值拿出来作为4个通道的数据,并在天线维度进行排序做角度的测量即可。下面着重分析一下这种发射模式的优缺点以及针对其缺点的解决办法。
优缺点
优点:1、相较于TDMA它利用了全部的发射资源,发射增益有10*log10(Nt) dB的提升。2、相较于其它需要改变各发射天线频率的发射模式,其发射的实现硬件要求低(只需要一个频率源,并在发射端加相移器即可)。3、分离方式简单。
缺点:1、这种方法对相位的精度要求较高,移相器的误差会导致 DDMA 波形出现虚假的 ghost 目标,增加雷达的虚警率。2、原理与TDMA时PRF减小导致最大无模糊测速范围降低类似,由于人为地在每个发射通道上附加了频偏,导致雷达的最大不模糊速度区间 (也就是最大不模糊 Doppler 域)变小了。
最大无模糊测速范围降低及其解决办法
后文重点讲讲为什么该发射模式会导致最大无模糊测速范围减小,以及如何进行速度解模糊(该解模糊的内容也会在后续关于解模糊专题的博文中给出)。
关于DDMA速度模糊的说明:对于TDM_MIMO,有公式: ,Tc为同一个发射天线前后两个chirp之间的时间间隔。
,Tc为同一个发射天线前后两个chirp之间的时间间隔。 , v为目标速度。雷达的最大无模糊速度范围区间为:[-Vmax Vmax],由前述两式,可以得到多普勒频率区间为:
, v为目标速度。雷达的最大无模糊速度范围区间为:[-Vmax Vmax],由前述两式,可以得到多普勒频率区间为: ,无模糊多普勒域的长度为:1/Tc, 对于DDMA,多普勒频移 除目标速度带来的外,还有人为增加的相邻两个发射天线的chirp之间相位差值为:
,无模糊多普勒域的长度为:1/Tc, 对于DDMA,多普勒频移 除目标速度带来的外,还有人为增加的相邻两个发射天线的chirp之间相位差值为: 。那么同一个目标在相邻两发射天线信号所产生的回波中多普勒频差为:
。那么同一个目标在相邻两发射天线信号所产生的回波中多普勒频差为: ,代入前面,得到相邻两发射天线信号所产生的回波中检测出的速度值相差:
,代入前面,得到相邻两发射天线信号所产生的回波中检测出的速度值相差: 。为了不混淆不同发射天线的数据,目标的最大速度不能超过∆𝑉,也就是说雷达的最大不模糊速度区间(或最大不模糊Doppler域)变为了原来的1/N,范围从2*Vmax到2*Vmax/N。可信的只有当速度落在[0,∆V ]区间内时,才不会产生模糊:如下图中的Case1所示,Tx0-Tx3对应的速度无模糊地落在了CDAB这几个区间中:
。为了不混淆不同发射天线的数据,目标的最大速度不能超过∆𝑉,也就是说雷达的最大不模糊速度区间(或最大不模糊Doppler域)变为了原来的1/N,范围从2*Vmax到2*Vmax/N。可信的只有当速度落在[0,∆V ]区间内时,才不会产生模糊:如下图中的Case1所示,Tx0-Tx3对应的速度无模糊地落在了CDAB这几个区间中:
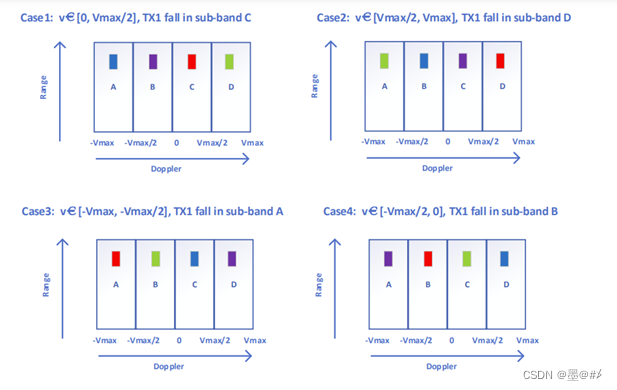
速度落入不同区间时的RD图
如果v 超出了这个范围(如上图中case2, 3, 4情况),Tx1/2/3/4 和子区间 C/D/A/B 的对应关系就会发生改变,此时就无法再仅仅根据子区间的位置去分离不同的发射天线数据(无法知道这四个区间中哪个是Tx1对应的速度),这就是所谓的 DDMA 速度模糊。
DDMA发射模式下速度解模糊方法探讨:基于Empty-band 的 DDMA。
前面之所以产生速度模糊的原因在于我们没法知道Tx1是哪个区间。如果能将这个问题解决那么就能完成速度的解模糊(这里的速度解模糊是将测速范围从2*Vmax/N变回2*Vmax)。所谓的Empty-band,就是比如现在有4个发射天线,按照上面的说法,第K个发射天线其前后chirp之间的相位差应该是:2*pi*(k-1)/4,然后在多普勒fft之后就能有4个区间去对应这4个发射天线,但是如果将第K个发射天线前后chirp之间的相位差改成比如:2*pi*(k-1)/6,(等效增加了两个发射天线,但是实际上还是4个发射天线在发射,但此时会有6个区间,且其中有两个空的位置没有对应的目标存在,我们可以通过判断是哪两个空的位置没有目标存在而得到目标的实际速度是多少。如下图所示:
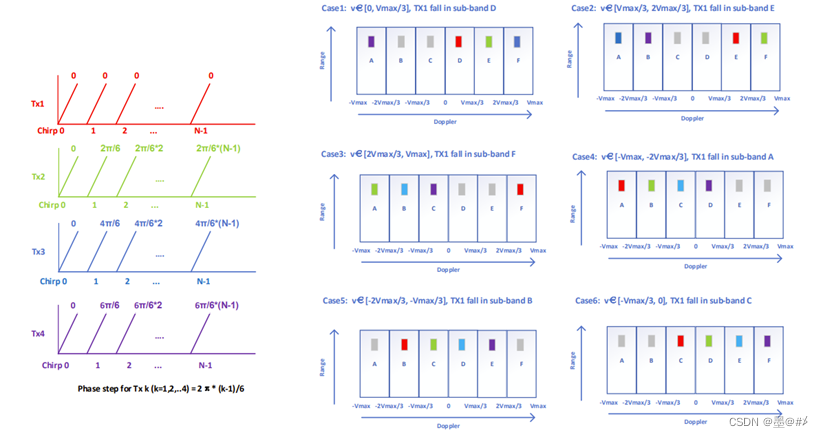
增加两个Empty-band的4发DDMA效果示意图
我们可以看出目标的实际速度在整个不模糊速度区间[−𝑉𝑚𝑎𝑥, 𝑉𝑚𝑎𝑥]上的位置分布共有六种可能(即TX1落入A/B/C/D/E/F中的哪个sub-band),而我们只要能确定在这六个sub-band 上哪两个sub-band上没有信号落入(即图中灰色框所在的 sub-band 编号), 就能推断出上面六个case中哪个case 成立(灰色框后面的即为Tx1对应的位置),从而完成速度解模糊。不过你需要设置单天线发射的chirp个数,使得每个区间对应的格数为整数。
DDMA是Ti AWR2944主要介绍的一种发射模式,硬件上容易实现,通道的分离也简单,其最大无迷糊测速区间的下降是需要解决的一个问题,Ti给其的评价是:比较适合下一代高性能雷达的要求,是未来主流的雷达波形之一。
D、PMCW
PMCW应该算是一种新体制的雷达了,它发射的不是chirp信号,其发射频率恒定,在发射端用相位来对载频进行调制。以下文章可供参考:
《PMCW Waveform and MIMO Technique for a 79 GHz CMOS Automotive Radar》
后续可以出一个专题的博文进行讨论,本篇博文还是限于chirp体制雷达发射模式的讨论。
三、总结
本篇博文对MIMO体制下的发射模式做了一个简单的概述,并例举了几种具备实用价值的发射模式,给出了其发射方式、分离原理、优缺点以及存在的一些主要问题和解决办法。本篇博文会基于对这方面知识理解的加深以及读者的反馈长期更新内容和所附资料,有不当之处或有其它有益的参考资料可以在评论区给出,我们一起维护,我会定期完善。
四、参考资料
《Analysis and Comparison of MIMO Radar Waveforms》 Hongbo Sun, Frederic Brigui
搜索结果 - TI.com 《MIMO radar》
搜索结果 - TI.com 《基于AWR2944的汽车雷达DDMA波形的原理和实现》
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)