目录
学习目标
内容
通信方法
并行通信
串行通信
通信方向
通信方式
UART
特点
串口参数
通信流程
寄存器
USART_SR
USART_DR
USART_BRR
过程
代码
运行结果
运行结果
遇到的问题
总结
学习目标
本节我们要学习的的是STM32的通信部分,主要介绍UART(通用异步收发器),是一种异步、全双工的通信方式。
内容
首先,我们先来介绍一下通信的基本知识,之前在51单片机的学习中我们也接触过UART,在此就不做详细介绍,感兴趣的同学请看51单片机基础——串口通信 。
通信方法
并行通信
- 传输原理:数据各个位同时传输。
- 优点:速度快
- 缺点:占用引脚资源多
串行通信
- 传输原理:数据按位顺序传输。
- 优点:占用引脚资源少
- 缺点:速度相对较慢
通信方向
- 单工: 数据传输只支持数据在一个方向上传输
- 半双工:允许数据在两个方向上传输,但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信;
- 全双工:允许数据同时在两个方向上传输,因此,全双工通信是两个单工通信方式的结合,它要求发送设备和接收设备都有独立的接收和发送能力。
通信方式
- 同步通信:带时钟同步信号传输。如SPI,IIC通信接口
- 异步通信:不带时钟同步信号。如UART(通用异步收发器),单总线
这是一些常见的串行通信接口,熟悉51单片机的同学应该都接触过,在此不做详细介绍,感兴趣可以去我的51单片机笔记一一了解。我们需要知道的是同步就需要时钟,半双工一般是需要一个输入输出端口,而全双工一般有两个。

UART
与51不同的是,STM32F407支持6个UART。但其他都是基本一样的,所以理解起来还是比较简单的。
特点
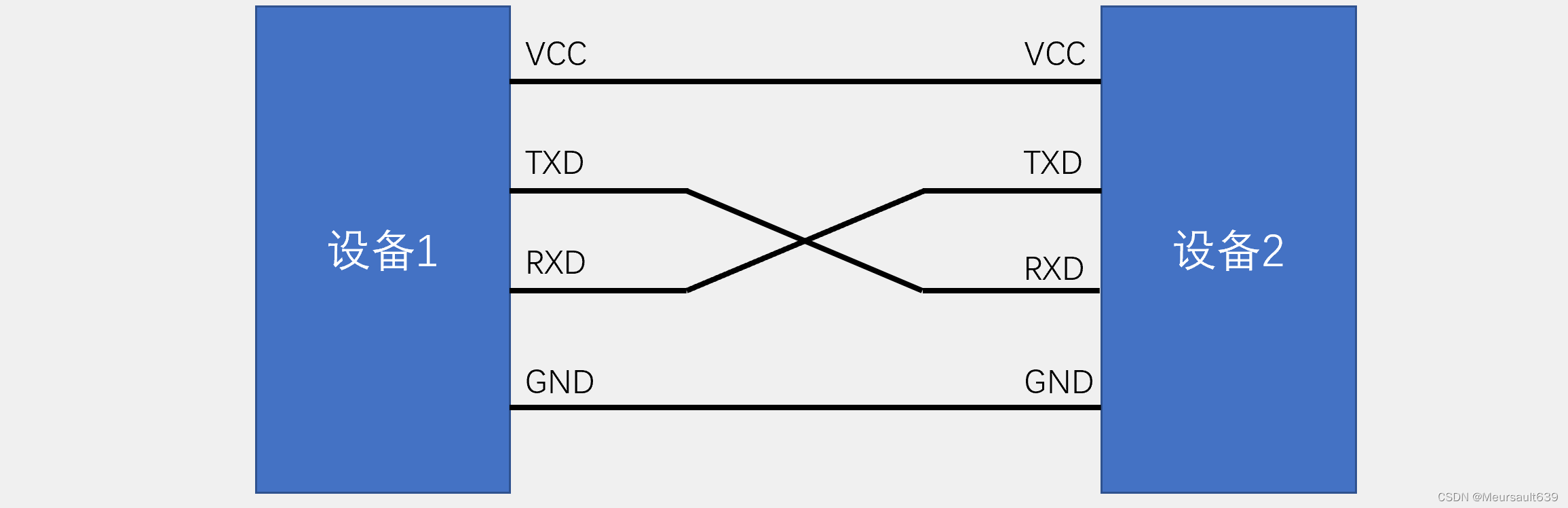
- 简单双向串口通信有两根通信线(发送端TXD和接收端RXD)
- TXD与RXD要交叉连接
- 当只需单向的数据传输时,可以直接一根通信线
- 当电平标准不一致时,需要加电平转换芯片
- 支持小数波特率发生器系统,提供精确的波特率。(通信双方事先约定好一种速度即波特率)
- 可配置的16倍过采样或8倍过采样,为速度容差与时钟容差的灵活配置提供了可能。
- 可配置的停止位(支持1或者2位停止位)
- 可编程的数据字长度(8位或者9位)
- 可配置的使用DMA多缓冲器通信
- 单独的发送器和接收器使能位
- 检测标志:
- 多个带标志的中断源,触发中断(串行通信可以发送接收数据,接收到一个数据可以触发一个中断)
- 其他:校验控制、四个错误检测标志
串口参数
我们在使用通信之前,需要设置好串口通信所需的参数,如下所示。
- 起始位
- 数据位(8位或9位)
- 奇偶校验位(第9位)
- 停止位(1、15、2位)
- 波特率设置

通信流程
红色代表发送,蓝色代表接收,其实核心部分就是下面的设置波特率 ,而这一部分,我们会在后面的代码中呈现出来,在此不做介绍。

寄存器
USART_SR
SR寄存器叫做状态寄存器(Status register),具体每个位对应是什么就不一一介绍,手册上都有详细的介绍。到时候再到代码进行介绍。
USART_DR
DR寄存器叫做数据寄存器(Data register),主要用来接收和发送数据。
USART_BRR
BRR寄存器叫波特率寄存器(Baud rate register),用来配置波特率。

过程
- 串口时钟使能,GPIO 时钟使能。
- 设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
- GPIO 初始化设置:要设置模式为复用功能。
- 串口参数初始化:设置波特率,字长,奇偶校验等参数。
- 开启中断并且初始化 NVIC,使能中断(如果需要开启中断才需要这个步骤)。
- 使能串口。
- 编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)。
代码
这一段代码,就是简单的一个串口通信,我们使用单片机与电脑通信,将数据发送给单片机,再由单片机发送给电脑。
#include "stm32f4xx.h"
#include "usart.h"
#include "delay.h"
void My_USART1_Init(void)
{
// 串口1是接在APB2上的
GPIO_InitTypeDef GPIO_InitStructure;// GPIO
USART_InitTypeDef USART_InitStructure;// 串口
NVIC_InitTypeDef NVIC_InitStructure;// 中断
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);// 使能串口1
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);// 使能GPIO
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);// PA9,PA10初始化
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 设置串口
USART_InitStructure.USART_BaudRate = 115200;// 波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 硬件流控
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;// 发送接收
USART_InitStructure.USART_Parity = USART_Parity_No;// 奇偶校验
USART_InitStructure.USART_StopBits = USART_StopBits_1;// 停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;// 发送位数
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1,ENABLE);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
// 设置中断
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;// 响应优先级
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;// 抢占优先级
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_Init( &NVIC_InitStructure);
}
// 中断函数
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE)){
res = USART_ReceiveData(USART1);
USART_SendData(USART1,res);
}
}
int main(void)
{
// 中断分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
My_USART1_Init();
while(1);
}
运行结果
上面的代码是一个简单的例子,接下来我们看一个复杂一点的例子,只给出主函数,其他头文件有需要的可以找我或者去正点原子官方进行下载。
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "beep.h"
#include "key.h"
int main(void)
{
u8 t,key,len;
u16 times=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);// 设置中断优先级分组2
delay_init(168); //延时函数初始化
uart_init(115200); //波特率115200
LED_Init(); //初始化LED
KEY_Init();// 按键初始化
printf("您好,请问有什么能帮助到你的吗?\r\n");
while(1)
{
key = KEY_Scan(0);
if(USART_RX_STA&0x8000)// 判断接收完成位
{
len=USART_RX_STA&0x3fff;// 数据长度
printf("\r\n您发送的问题我们已经收到:\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART1, USART_RX_BUF[t]); // 向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);// 等待发送结束
}
printf("\r\n\r\n");//换行
USART_RX_STA=0;
}else
{
times++;
if(times%30==0)LED0=!LED0;//LED闪烁,提示正常
delay_ms(10);
}
if(key == 1){
printf("\r\n您好,我是人工客服小陈,很高兴为您服务!\r\n");
}
}
}
运行结果
遇到的问题
在此过程中,遇到了一些问题,比如代码补全功能调不出来,还有XCOM的乱码问题,代码补全的问题,用MDK的exe替换就好了,因为可能是之前安装的是51的安装包。关于乱码的问题,我单独写一篇文章,希望能帮助遇到相同问题的同学,关于使用XCOM进行串口通信时乱码的解决方案。
总结
好了,关于串口通信我们先讲这么多,希望能对大家有所帮助,谢谢大家了!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)