1.安装ROS驱动:
sudo apt-get install ros-kinetic-velodyne
2.创建ROS工程:
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro kinetic -y
catkin_make
source devel/setup.bash
3.把Velodyne XML文件转成ROS节点的YAML文件,安装U盘里有
rosrun velodyne_pointcloud gen_calibration.py ~/VLP-16.xml
5.加载
roslaunch velodyne_pointcloud VLP16_points.launch calibration:=~/VLP-16.yaml
注意:第三步和第四步对后续的点云图显示无太大影响
6.显示点云图
1.在终端中输入 roscore
2.打开另两个终端,分别输入
roslaunch velodyne_pointcloud VLP16_points.launch
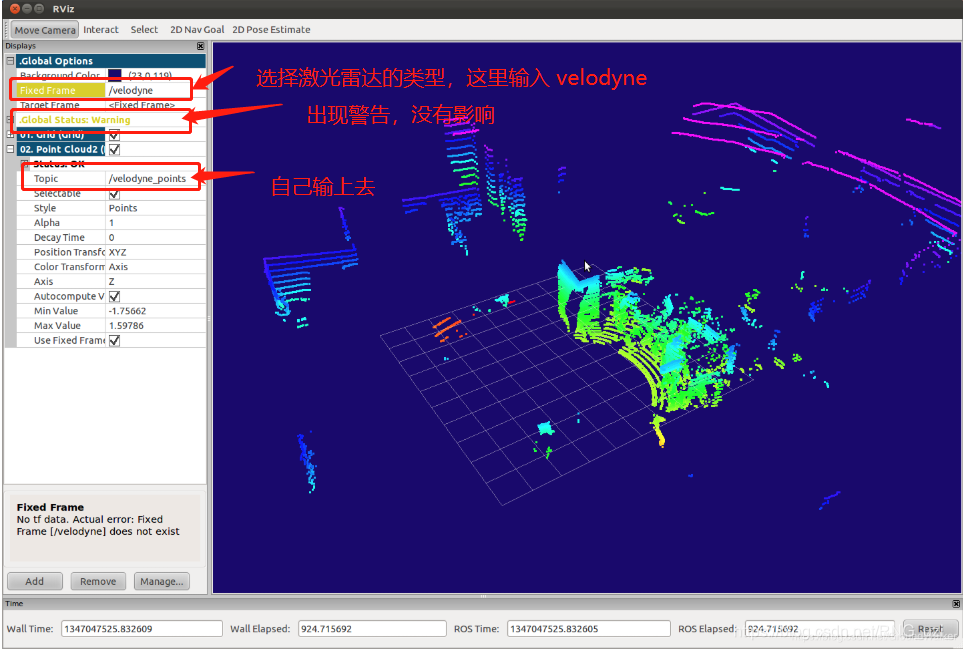
rosrun rviz rviz -f velodyne
点击左下角Add,选择PointCloud2,Topic一栏填写/velodyne_points,开始出现点云图。
7.数据保存(格式为.bag数据)
rosbag record -O out /velodyne_points
只保存/velodyne_points这个topic的数据(可以用rostopic list -v开看当前可用的topic),保存在当前目录的out.bag
8. .bag转.pcd
参考:http://wiki.ros.org/pcl_ros
方法一:bag_to_pcd
rosrun pcl_ros bag_to_pcd <input_file.bag> <topic> <output_directory>
# 创建文件夹,将文件保存在文件夹内
# example:
rosrun pcl_ros bag_to_pcd data.bag /velodyne_points ./pcd
9. pcl_viewer显示.pcd点云
pcl_viewer
如果没有安装pcl_viewer模块,可以使用sudo apt-get install pcl_viewer
Linux 下可直接在命令行输入 pcl_viewr path/to/.pcd或.vtk可直接显示pcl中的点云文件。
pcl_viewr几个常用的命令: r键: 重现视角。如果读入文件没有在主窗口显示,不妨按下键盘的r键一试。 j键:截图功能。 g键:显示/隐藏 坐标轴。 鼠标:左键,使图像绕自身旋转; 滚轮, 按住滚轮不松,可移动图像,滚动滚轮,可放大/缩小 图像; 右键,“原 地”放大/缩小。 -/+:-(减号)可缩小点; +(加号),可放大点。 pcl_viewe -bc r,g,b /path/to/.pcd:可改变背景色. pcl_viewer还可以用来直接显示pfh,fpfh(fast point feature histogram),vfh等直方图。 常用的pcl_viewer 好像就这些,其他未涉及到的功能可通过pcl_viewer /path/.pcd 打开图像,按键盘h(获取帮 助)的方式获得 。
连接雷达:注意 :将网络连接状态改为桥接连接
修改有线网络里面的ipv4:( 改为手动) IP地址192.168.1.77,子网掩码255.255.255.0,网关192.168.1.1。
上面设置好之后连接该无线,此时会断网然后接入激光雷达,打开浏览器输入192.168.1.201可以看到激光雷达的配置文件。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)