通过对比VINS-Mono与其RGBD版本,分析其改动思路
一、feature_tracker
头文件加入了ros的多传感器时间戳
#include <message_filters/time_synchronizer.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
主程序中
ros::Subscriber sub_img = n.subscribe(IMAGE_TOPIC, 100, img_callback);
改为
message_filters::Subscriber<sensor_msgs::Image> sub_image(n, IMAGE_TOPIC, 1);
message_filters::Subscriber<sensor_msgs::Image> sub_depth(n, DEPTH_TOPIC, 1);
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image,sensor_msgs::Image> syncPolicy;
message_filters::Synchronizer<syncPolicy> sync(syncPolicy(10), sub_image, sub_depth);
sync.registerCallback(boost::bind(&img_callback, _1, _2));
参照 ros消息时间同步与回调_kint_zhao的博客-CSDN博客
回调函数也需要修改,接收depth,且此时将img_msg全改为color_msg
void img_callback(const sensor_msgs::ImageConstPtr &img_msg)
void img_callback(const sensor_msgs::ImageConstPtr &color_msg, const sensor_msgs::ImageConstPtr &depth_msg)
增加以下,把depth的ros message也转成cv::Mat,放在image里,创造depth_ptr指向
cv_bridge::CvImageConstPtr depth_ptr;
{
sensor_msgs::Image img;
img.header = depth_msg->header;
img.height = depth_msg->height;
img.width = depth_msg->width;
img.is_bigendian = depth_msg->is_bigendian;
img.step = depth_msg->step;
img.data = depth_msg->data;
img.encoding = sensor_msgs::image_encodings::MONO16;
depth_ptr = cv_bridge::toCvCopy(img, sensor_msgs::image_encodings::MONO16);
}
下面的readImage(),加入depth_ptr
trackerData[i].readImage(ptr->image.rowRange(ROW * i, ROW * (i + 1)), img_msg->header.stamp.toSec());
trackerData[i].readImage(ptr->image.rowRange(ROW * i, ROW * (i + 1)), depth_ptr->image.rowRange(ROW * i, ROW * (i + 1)), color_msg->header.stamp.toSec());
双目才用,可改可不改
trackerData[i].cur_img = ptr->image.rowRange(ROW * i, ROW * (i + 1));
trackerData[i].cur_img = ptr->image.rowRange(ROW * i, ROW * (i + 1));
trackerData[i].cur_depth = depth_ptr->image.rowRange(ROW * i, ROW * (i + 1));
经过readImage()操作以后,prev-cur-forw帧所有的数据都基本上获取了也对应上了,然后就需要封装到sensor_msgs发布出去,由vins_estimator_node和rviz接收,分别进行后端操作和可视化。
发布过程中,生成feature_points的过程:给后端喂数据时,增加封装depth为sensor_msgs
if (PUB_THIS_FRAME)
{
cv::Mat show_depth = depth_ptr->image;
...
sensor_msgs::ChannelFloat32 velocity_x_of_point;
sensor_msgs::ChannelFloat32 velocity_y_of_point;
sensor_msgs::ChannelFloat32 depth_of_point;
利用这个ros消息的格式进行信息存储,增加depth
向depth_of_point.values添加像素2D点(u,v)的深度信息
for (int i = 0; i < NUM_OF_CAM; i++)
...
velocity_x_of_point.values.push_back(pts_velocity[j].x);
velocity_y_of_point.values.push_back(pts_velocity[j].y);
depth_of_point.values.push_back((int)show_depth.at<unsigned short>(round(cur_pts[j].y), round(cur_pts[j].x)));
将特征点id,矫正后归一化平面的3D点(x,y,z=1),像素2D点(u,v),像素的速度(vx,vy),和深度depth封装成sensor_msgs::PointCloudPtr类型的feature_points实例中,发布到pub_img
feature_points->channels.push_back(velocity_x_of_point);
feature_points->channels.push_back(velocity_y_of_point);
feature_points->channels.push_back(depth_of_point);
从头文件可以看到,改了readImage()和 增加了特征点的depth信息
void readImage(const cv::Mat &_img, const cv::Mat &_depth, double _cur_time);
...
cv::Mat prev_depth, cur_depth, forw_depth;
接下来看readImage()具体加了什么
如果第一次输入图像,prev_img这个没用,prev_depth也是
if (forw_img.empty())
{
prev_img = cur_img = forw_img = img;
prev_depth = cur_depth = forw_depth = _depth;
}
else
{
forw_img = img;
forw_depth = _depth;
}
到函数末尾,所有特征点去畸变,计算速度之后,往前走,准备接收新帧,depth跟着走
prev_img = cur_img;
prev_depth = cur_depth;
prev_pts = cur_pts;
prev_un_pts = cur_un_pts;
cur_img = forw_img;
cur_depth = forw_depth;
cur_pts = forw_pts;
undistortedPoints();
prev_time = cur_time;
增加了深度话题,feature_tracker_node.cpp调用
extern std::string DEPTH_TOPIC;
fsSettings["depth_topic"] >> DEPTH_TOPIC;
二、 vins-estimator
void process() ,开启一个VIO 线程,没有回环部分
把每张图像中 所有特征点 信息取出来放在map容器 image里去,然后进行 estimator.processImage(image, img_msg->header),把深度信息也放到里面去,增加1维
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> image;
map<int, vector<pair<int, Eigen::Matrix<double, 8, 1>>>> image;
double velocity_x = img_msg->channels[3].values[i];
double velocity_y = img_msg->channels[4].values[i];
double depth = img_msg->channels[5].values[i] / 1000.0;
emplace_back到image容器时也要改
Eigen::Matrix<double, 8, 1> xyz_uv_velocity_depth;
xyz_uv_velocity_depth << x, y, z, p_u, p_v, velocity_x, velocity_y, depth;
image[feature_id].emplace_back(camera_id, xyz_uv_velocity_depth);
这些信息都是在feature_tracker_node.cpp中获得
增加李代数相关的sophus库
#include <sophus/se3.h>
#include <sophus/so3.h>
using Sophus::SE3;
using Sophus::SO3;
用于判断是否为关键帧的processImage(),加入深度阈值判断
void processImage(const map<int, vector<pair<int, Eigen::Matrix<double, 8, 1>>>> &image, const std_msgs::Header &header);
仿照visualInitialAlign(),visualInitialAlignWithDepth()
bool visualInitialAlignWithDepth();
initialStructure()
在用来后续做sfm的 SFMFeature tmp_feature中,SFMFeature结构体增加observation_depth(initial_sfm.h),来储存深度,把当前特征点的深度和当前帧的编号imu_j配对
tmp_feature.observation.push_back(make_pair(imu_j, Eigen::Vector2d{pts_j.x(), pts_j.y()}));
tmp_feature.observation.push_back(make_pair(imu_j, Eigen::Vector2d{pts_j.x(), pts_j.y()}));
tmp_feature.observation_depth.push_back(make_pair(imu_j, it_per_frame.depth));
初始化函数用改之后的visualInitialAlignWithDepth()
if (visualInitialAlign())
if (visualInitialAlignWithDepth())
bool Estimator::visualInitialAlign()也改了,
???为什么,不是已经改用visualInitialAlignWithDepth()来初始化了么
f_manager.triangulate(Ps, &(TIC_TMP[0]), &(RIC[0]));
f_manager.triangulateWithDepth(Ps, &(TIC_TMP[0]), &(RIC[0]));
visualInitialAlignWithDepth()对于visualInitialAlign()的改动:
改用新的triangulateWithDepth()来三角化特征点,得到深度
f_manager.triangulate(Ps, &(TIC_TMP[0]), &(RIC[0]));
f_manager.triangulateWithDepth(Ps, &(TIC_TMP[0]), &(RIC[0]));
删去了假设的尺度因子s,因此此时的深度已经获得
double s = (x.tail<1>())(0);
对应的,在把所有的平移对齐到滑窗中的第0帧时,删去s
???为什么要对齐
Ps[i] = s * Ps[i] - Rs[i] * TIC[0] - (s * Ps[0] - Rs[0] * TIC[0]);
Ps[i] = Ps[i] - Rs[i] * TIC[0] - (Ps[0] - Rs[0] * TIC[0]);
删去“把尺度模糊的3d点恢复到真实尺度下”这一步
for (auto &it_per_id : f_manager.feature)
{
it_per_id.used_num = it_per_id.feature_per_frame.size();
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))
continue;
it_per_id.estimated_depth *= s;
}
bool Estimator::relativePose()中,
把同时被frame_count_l frame_count_r帧看到的特征点在各自的像素坐标,返回给corres时,用新的getCorrespondingWithDepth()
corres = f_manager.getCorresponding(i, WINDOW_SIZE);
corres = f_manager.getCorrespondingWithDepth(i, WINDOW_SIZE);
用于计算视差的pts_0(u0,v0);pts_1(u1,v1);改为 pts_0(u0/z0,v0/z0);pts_1(u1/z1,v1/z1)
Vector2d pts_0(corres[j].first(0), corres[j].first(1));
Vector2d pts_1(corres[j].second(0), corres[j].second(1));
Vector2d pts_0(corres[j].first(0)/corres[j].first(2), corres[j].first(1)/corres[j].first(2));
Vector2d pts_1(corres[j].second(0)/corres[j].second(2), corres[j].second(1)/corres[j].second(2));
原本使用2D-2D的E矩阵(对极几何)恢复当前帧到枢纽帧的R、T,现在改用PNP。因为现在有depth(放在corres[?].second(2)),是3D-2D
if(average_parallax * 460 > 30 && m_estimator.solveRelativeRT(corres, relative_R, relative_T))
if(average_parallax * 460 > 30 && m_estimator.solveRelativeRT_PNP(corres, relative_R, relative_T))
solveOdometry()中,
把应该三角化但是没有三角化的特征点三角化时,加一步triangulateWithDepth(),对于深度传感器探测范围以外的点,采用原有的三角化方法triangulate()
f_manager.triangulate(Ps, tic, ric);
f_manager.triangulateWithDepth(Ps, tic, ric);
f_manager.triangulate(Ps, tic, ric);
其中的optimization()(借助ceres进行非线性优化)中,
在定义待优化的参数块,类似g2o的顶点时,不管带不带有传感器时间延时,加入约束的变量(该特征点的第一个观测帧以及其他一个观测帧,加上外参和特征点逆深度)的参数块之后,在有输入深度信息的情况下,设定特征点深度para_Feature在优化过程中不可变
if (ESTIMATE_TD)
{
ProjectionTdFactor *f_td = new ProjectionTdFactor(pts_i, pts_j, it_per_id.feature_per_frame[0].velocity, it_per_frame.velocity,
it_per_id.feature_per_frame[0].cur_td, it_per_frame.cur_td,
it_per_id.feature_per_frame[0].uv.y(), it_per_frame.uv.y());
problem.AddResidualBlock(f_td, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index], para_Td[0]);
}
else
{
ProjectionFactor *f = new ProjectionFactor(pts_i, pts_j);
problem.AddResidualBlock(f, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index]);
}
if (ESTIMATE_TD)
{
ProjectionTdFactor *f_td = new ProjectionTdFactor(pts_i, pts_j, it_per_id.feature_per_frame[0].velocity, it_per_frame.velocity,
it_per_id.feature_per_frame[0].cur_td, it_per_frame.cur_td,
it_per_id.feature_per_frame[0].uv.y(), it_per_frame.uv.y());
problem.AddResidualBlock(f_td, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index], para_Td[0]);
if (it_per_id.estimate_flag == 1)
problem.SetParameterBlockConstant(para_Feature[feature_index]);
}
else
{
ProjectionFactor *f = new ProjectionFactor(pts_i, pts_j);
problem.AddResidualBlock(f, loss_function, para_Pose[imu_i], para_Pose[imu_j], para_Ex_Pose[0], para_Feature[feature_index]);
if (it_per_id.estimate_flag == 1)
problem.SetParameterBlockConstant(para_Feature[feature_index]);
}
FeaturePerFrame(每一个特征点的在一张图像中属性 point)中,加上1维存放depth
FeaturePerFrame(const Eigen::Matrix<double, 7, 1> &_point, double td)
FeaturePerFrame(const Eigen::Matrix<double, 8, 1> &_point, double td)
...
depth = _point(7);
...
double depth;
FeaturePerId,也加上测量depth,和是否外部输入depth标志
double measured_depth;
int estimate_flag;//0 initial; 1 by depth image; 2 by triangulate
FeaturePerId(int _feature_id, int _start_frame)
: feature_id(_feature_id), start_frame(_start_frame),
used_num(0), estimated_depth(-1.0), solve_flag(0)
{
}
FeaturePerId(int _feature_id, int _start_frame, double _measured_depth)
: feature_id(_feature_id), start_frame(_start_frame),
used_num(0), estimated_depth(-1.0), measured_depth(_measured_depth), solve_flag(0),estimate_flag(0)
{
}
FeatureManager中,
addFeatureCheckParallax()(特征点进入时检查视差,是否为关键帧)加入depth
getCorresponding()(获得前后两帧之间匹配特征点3D坐标)改用新的
triangulate()(特征点三角化求深度(SVD分解))改用新的
bool addFeatureCheckParallax(int frame_count, const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> &image, double td);
...
vector<pair<Vector3d, Vector3d>> getCorresponding(int frame_count_l, int frame_count_r);
...
void triangulate(Vector3d Ps[], Vector3d tic[], Matrix3d ric[]);
bool addFeatureCheckParallax(int frame_count, const map<int, vector<pair<int, Eigen::Matrix<double, 8, 1>>>> &image, double td);
...
vector<pair<Vector3d, Vector3d>> getCorrespondingWithDepth(int frame_count_l, int frame_count_r);
...
void triangulateWithDepth(Vector3d Ps[], Vector3d tic[], Matrix3d ric[]);
feature_manager.h定义了3个新函数,用来代替原本的
bool addFeatureCheckParallax(int frame_count, const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> &image, double td);
...
vector<pair<Vector3d, Vector3d>> getCorresponding(int frame_count_l, int frame_count_r);
...
void triangulate(Vector3d Ps[], Vector3d tic[], Matrix3d ric[]);
bool addFeatureCheckParallax(int frame_count, const map<int, vector<pair<int, Eigen::Matrix<double, 8, 1>>>> &image, double td);
...
vector<pair<Vector3d, Vector3d>> getCorrespondingWithDepth(int frame_count_l, int frame_count_r);
...
void triangulateWithDepth(Vector3d Ps[], Vector3d tic[], Matrix3d ric[]);
这里定义了上面三个新函数
bool FeatureManager::addFeatureCheckParallax(),(加特征点信息,同时检查上一帧是否时关键帧的函数 ),从FeaturePerId里提取新建特征点id和该特征点在滑窗中的当前位置(作为这个特征点的起始位置)时,加上1维提取、存放depth
bool FeatureManager::addFeatureCheckParallax(int frame_count, const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> &image, double td)
...
feature.push_back(FeaturePerId(feature_id, frame_count));
bool FeatureManager::addFeatureCheckParallax(int frame_count, const map<int, vector<pair<int, Eigen::Matrix<double, 8, 1>>>> &image, double td)
...
feature.push_back(FeaturePerId(feature_id, frame_count, id_pts.second[0].second(7)));
新的getCorresponding(),(得到同时被frame_count_l frame_count_r帧看到的特征点在各自的坐标),在获得在feature_per_frame中的索引(当前帧-第一次观测到特征点的帧数),最后配对放入corres,之间插入深度值判断(用来剔除异常特征点),然后将坐标乘回depth,得到像素坐标(u,v)形式
double depth_a = it.feature_per_frame[idx_l].depth;
if (depth_a < 0.1 || depth_a > 10)//max and min measurement
continue;
double depth_b = it.feature_per_frame[idx_r].depth;
if (depth_b < 0.1 || depth_b > 10)//max and min measurement
continue;
...
a = a * depth_a;
b = b * depth_b;
旧的triangulate(),末尾加上,将自己设定的estimate_flag=2(表示此时得到的深度值是三角化得来),以及深度值判断,不符合阈值则用深度测量模式。estimator.cpp里优先用新的,再用旧的(对于深度传感器探测范围以外的点,采用原有的三角化方法triangulate()),反正都是循环着后端求解位姿
it_per_id.estimate_flag = 2;
if (it_per_id.estimated_depth < 0.1)
{
it_per_id.estimated_depth = INIT_DEPTH;
it_per_id.estimate_flag = 0;
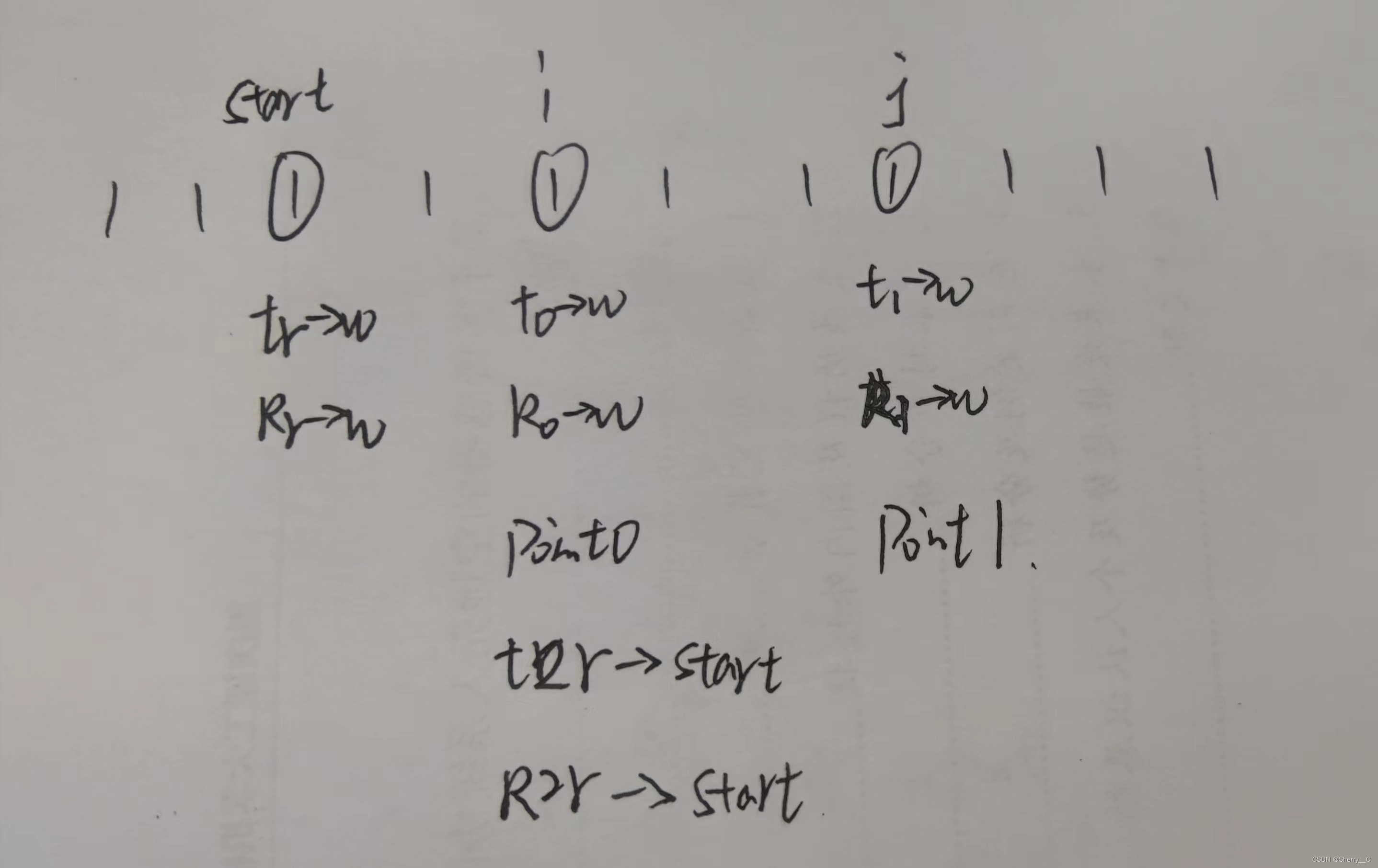
新的triangulateWithDepth(),大改。
原本的imu_i(特征点开始帧)改用start_frame表示,imu_j改用start_frame+j表示,位姿转换的代号变一下(?感觉像水创新点)。删去ROS的单目相机判断,删去SVD恢复深度值的相关代码行,引入verified_depths来储存右帧的depth,得到start_frame+i的相机坐标系位姿时加入深度值判断。
右帧的判断方式全改:从start帧开始,由i帧3D坐标乘i、j帧间的变换矩阵得到的j帧3D坐标---再转2D坐标,若与从特征点容器取得的j帧2D坐标,的残差合格,则i帧取为右帧。?应该是增加定位精度,剔除不合格的右帧,保证深度值正常
第一个观察到这个特征点的相机坐标系下的深度值=各个能看到该特征点的深度值平均
void FeatureManager::triangulateWithDepth(Vector3d Ps[], Vector3d tic[], Matrix3d ric[])
{
for (auto &it_per_id : feature)
{
it_per_id.used_num = it_per_id.feature_per_frame.size();
if (!(it_per_id.used_num >= 2 && it_per_id.start_frame < WINDOW_SIZE - 2))
continue;
if (it_per_id.estimated_depth > 0)
continue;
int start_frame = it_per_id.start_frame;//原本的imu-i
vector<double> verified_depths;//储存右帧的深度容器
Eigen::Vector3d tr = Ps[start_frame] + Rs[start_frame] * tic[0];
Eigen::Matrix3d Rr = Rs[start_frame] * ric[0]; //第一个观察到这个特征点的KF的位姿
for (int i=0; i < (int)it_per_id.feature_per_frame.size(); i++)
{
Eigen::Vector3d t0 = Ps[start_frame+i] + Rs[start_frame+i] * tic[0];
Eigen::Matrix3d R0 = Rs[start_frame+i] * ric[0];// 得到该KF(左帧)的相机坐标系位姿
double depth_threshold = 3; //for handheld and wheeled application. Since d435i <3 is quiet acc
//double depth_threshold = 10; //for tracked application, since IMU quite noisy in this scene
if (it_per_id.feature_per_frame[i].depth < 0.1 || it_per_id.feature_per_frame[i].depth >depth_threshold)
continue;
Eigen::Vector3d point0(it_per_id.feature_per_frame[i].point * it_per_id.feature_per_frame[i].depth);//start_frame+i帧的该特征点的3D坐标,(feature_per_frame[0]=start_frame)
// transform to reference frame
// T_w_cj -> T_c0_cj
Eigen::Vector3d t2r = Rr.transpose() * (t0 - tr);
Eigen::Matrix3d R2r = Rr.transpose() * R0; // start_frame+i帧相对于世界的 转化 为start_frame+i帧与start_frame帧的相对位姿变换
for (int j=0; j<(int)it_per_id.feature_per_frame.size(); j++)
{
if (i==j)
continue;
Eigen::Vector3d t1 = Ps[start_frame+j] + Rs[start_frame+j] * tic[0];
Eigen::Matrix3d R1 = Rs[start_frame+j] * ric[0];// 得到start_frame+j帧的相机坐标系位姿
Eigen::Vector3d t20 = R0.transpose() * (t1 - t0);
Eigen::Matrix3d R20 = R0.transpose() * R1; // start_frame+j帧相对于世界的 转化 为start_frame+j帧与start_frame+i帧的相对位姿变换
Eigen::Vector3d point1_projected = R20.transpose() * point0 - R20.transpose() * t20;//start_frame+j帧的该特征点的3D坐标,由start_frame+i的3D坐标推得
Eigen::Vector2d point1_2d(it_per_id.feature_per_frame[j].point.x(), it_per_id.feature_per_frame[j].point.y());//start_frame+j帧的该特征点的2D坐标(u,v),从特征点容器直接取
Eigen::Vector2d residual = point1_2d - Vector2d(point1_projected.x() / point1_projected.z(), point1_projected.y() / point1_projected.z());//该特征点的残差,特征点容器取得的坐标-ij标转换得到的坐标
if (residual.norm() < 10.0 / 460) {//this can also be adjust to improve performance
//残差合格才代表start_frame+i、start_frame+j间的变换矩阵没问题,右帧的特征点3D坐标由start_frame+i推得,储存其3D坐标,也变相剔除了j《i的情况
Eigen::Vector3d point_r = R2r * point0 + t2r;
verified_depths.push_back(point_r.z());//储存右帧的深度值
}
}
}
if (verified_depths.size() == 0)
continue;
double depth_sum = std::accumulate(std::begin(verified_depths),std::end(verified_depths),0.0);
double depth_ave = depth_sum / verified_depths.size();
it_per_id.estimated_depth = depth_ave;//第一个观察到这个特征点的相机坐标系下的深度值=各个能看到该特征点的深度值平均
it_per_id.estimate_flag = 1;//设深度值获得方式为深度图
if (it_per_id.estimated_depth < 0.1)
{
it_per_id.estimated_depth = INIT_DEPTH;// 具体太近就设置成默认值
it_per_id.estimate_flag = 0;
}
}
}
void readParameters(ros::NodeHandle &n)中,
增加了若无轨迹输出文件夹,则新建
(这里应该是)
std::string OUTPUT_PATH;
fsSettings["output_path"] >> OUTPUT_PATH;
VINS_RESULT_PATH = OUTPUT_PATH + "/vins_result_no_loop.csv";
std::cout << "result path " << VINS_RESULT_PATH << std::endl;
// create folder if not exists
FileSystemHelper::createDirectoryIfNotExists(OUTPUT_PATH.c_str());
但是,在utility.h里没有定义class FileSystemHelper,而是后续的mono加上了
#include <sys/types.h>
#include <sys/stat.h>
#include <libgen.h>
#include <stdio.h>
#include <stdlib.h>
...
class FileSystemHelper
{
public:
/******************************************************************************
* Recursively create directory if `path` not exists.
* Return 0 if success.
*****************************************************************************/
static int createDirectoryIfNotExists(const char *path)
{
struct stat info;
int statRC = stat(path, &info);
if( statRC != 0 )
{
if (errno == ENOENT)
{
printf("%s not exists, trying to create it \n", path);
if (! createDirectoryIfNotExists(dirname(strdupa(path))))
{
if (mkdir(path, S_IRWXU | S_IRWXG | S_IROTH | S_IXOTH) != 0)
{
fprintf(stderr, "Failed to create folder %s \n", path);
return 1;
}
else
return 0;
}
else
return 1;
} // directory not exists
if (errno == ENOTDIR)
{
fprintf(stderr, "%s is not a directory path \n", path);
return 1;
} // something in path prefix is not a dir
return 1;
}
return ( info.st_mode & S_IFDIR ) ? 0 : 1;
}
};
添加64浮点数
#include <std_msgs/Float64.h>
Keyframe、PointCloud的pub函数加入depth。pubOdometry()加入pub_delta_p、pub_delta_v、pub_delta_t,来表示???
待补
class ImageFrame中,实例化对象和map都加上1维存放depth
ImageFrame(const map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>>& _points, double _t):t{_t},is_key_frame{false}
...
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>> > > points;
ImageFrame(const map<int, vector<pair<int, Eigen::Matrix<double, 8, 1>>>>& _points, double _t):t{_t},is_key_frame{false}
...
map<int, vector<pair<int, Eigen::Matrix<double, 8, 1>> > > points;
struct SFMFeature中,加入
vector<pair<int,double>> observation_depth;
class GlobalSFM中,加入
void triangulateTwoFramesWithDepth(int frame0, Eigen::Matrix<double, 3, 4> &Pose0,
int frame1, Eigen::Matrix<double, 3, 4> &Pose1,
vector<SFMFeature> &sfm_f);
class MotionEstimator中,加入...用来计算3D-2D相机运动得到RT(ICP好像没用上?)
bool solveRelativeRT_ICP (vector<pair<Vector3d, Vector3d>> &corres, Matrix3d &R, Vector3d &T);
bool solveRelativeRT_PNP(const vector<pair<Vector3d, Vector3d>> &corres, Matrix3d &Rotation, Vector3d &Translation);
添加新的RefineGravity(),
该函数的目的是,迭代改善重力g的方向。
n_state表示Ax=b中,A的维度。all_image_frame 保存了每张图像关键帧的位姿,预积分量和关于角点的信息,3维。重力向量参数化,自由度为2。最后1维原本是深度值。
tmp_A(6,9) = [-I*dt 0 (R^bk_c0)*dt*dt*b/2 (R^bk_c0)*((p^c0_ck+1)-(p^c0_ck)) ]
[ -I (R^bk_c0)*(R^c0_bk+1) (R^bk_c0)*dt*b 0 ]
新的tmp_A,删去了(R^bk_c0)*((p^c0_ck+1)-(p^c0_ck))。(???因为这一列对应的状态量是尺度s,而我们的深度值已知,不需要优化s了)
tmp_b(6,1) = [ (a^bk_bk+1)+(R^bk_c0)*(R^c0_bk+1)*p^b_c-p^b_c - (R^bk_c0)*dt*dt*||g||*(g^-)/2 , (b^bk_bk+1)-(R^bk_c0)dt*||g||*(g^-)]^T
新的tmp_b,原本的 (a^bk_bk+1)+(R^bk_c0)*(R^c0_bk+1)*p^b_c-p^b_c - (R^bk_c0)*dt*dt*||g||*(g^-)/2之后,减去(R^bk_c0)*((p^c0_ck+1)-(p^c0_ck))。(???
A删去的同时,b也要减)
???下面是EKF常规做法
int n_state = all_frame_count * 3 + 2 + 1;
...
MatrixXd tmp_A(6, 9);
...
tmp_A.block<3, 1>(0, 8) = frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T) / 100.0;
tmp_b.block<3, 1>(0, 0) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[0] - TIC[0] - frame_i->second.R.transpose() * dt * dt / 2 * g0;
...
A.bottomRightCorner<3, 3>() += r_A.bottomRightCorner<3, 3>();
b.tail<3>() += r_b.tail<3>();
A.block<6, 3>(i * 3, n_state - 3) += r_A.topRightCorner<6, 3>();
A.block<3, 6>(n_state - 3, i * 3) += r_A.bottomLeftCorner<3, 6>();
...
VectorXd dg = x.segment<2>(n_state - 3);
int n_state = all_frame_count * 3 + 2;
...
MatrixXd tmp_A(6, 8);
...
tmp_b.block<3, 1>(0, 0) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[0] - TIC[0] - frame_i->second.R.transpose() * dt * dt / 2 * g0 - frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T);
...
A.bottomRightCorner<2, 2>() += r_A.bottomRightCorner<2, 2>();
b.tail<2>() += r_b.tail<2>();
A.block<6, 2>(i * 3, n_state - 2) += r_A.topRightCorner<6, 2>();
A.block<2, 6>(n_state - 2, i * 3) += r_A.bottomLeftCorner<2, 6>();
...
VectorXd dg = x.segment<2>(n_state - 2);
添加新的LinearAlignment(),
该函数的目的是,求解各帧的速度,枢纽帧的重力方向,以及尺度
改动和RefineGravity()类似,去掉尺度相关的维度、J矩阵
int n_state = all_frame_count * 3 + 3 + 1;
...
MatrixXd tmp_A(6, 10);
...
tmp_A.block<3, 1>(0, 9) = frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T) / 100.0;
tmp_b.block<3, 1>(0, 0) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[0] - TIC[0];
...
A.bottomRightCorner<4, 4>() += r_A.bottomRightCorner<4, 4>();
b.tail<4>() += r_b.tail<4>();
A.block<6, 4>(i * 3, n_state - 4) += r_A.topRightCorner<6, 4>();
A.block<4, 6>(n_state - 4, i * 3) += r_A.bottomLeftCorner<4, 6>();
...
double s = x(n_state - 1) / 100.0;
ROS_DEBUG("estimated scale: %f", s);
g = x.segment<3>(n_state - 4);
...
if(fabs(g.norm() - G.norm()) > 1.0 || s < 0)
...
RefineGravity(all_image_frame, g, x);
s = (x.tail<1>())(0) / 100.0;
(x.tail<1>())(0) = s;
ROS_DEBUG_STREAM(" refine " << g.norm() << " " << g.transpose());
if(s < 0.0 )
return false;
else
return true;
int n_state = all_frame_count * 3 + 3;//no scale now
...
MatrixXd tmp_A(6, 9);//no scale now
...
tmp_b.block<3, 1>(0, 0) = frame_j->second.pre_integration->delta_p + frame_i->second.R.transpose() * frame_j->second.R * TIC[0] - TIC[0] - frame_i->second.R.transpose() * (frame_j->second.T - frame_i->second.T);
...
A.bottomRightCorner<3, 3>() += r_A.bottomRightCorner<3, 3>();
b.tail<3>() += r_b.tail<3>();
A.block<6, 3>(i * 3, n_state - 3) += r_A.topRightCorner<6, 3>();
A.block<3, 6>(n_state - 3, i * 3) += r_A.bottomLeftCorner<3, 6>();
...
g = x.segment<3>(n_state - 3);
...
if(fabs(g.norm() - G.norm()) > 1.0)
...
RefineGravityWithDepth(all_image_frame, g, x);
ROS_DEBUG_STREAM(" refine " << g.norm() << " " << g.transpose());
VisualIMUAlignment()改用新的LinearAlignment()
if(LinearAlignment(all_image_frame, g, x))
if(LinearAlignmentWithDepth(all_image_frame, g, x))
新的triangulateTwoFrames(),
该函数的目的是,根据两帧索引和位姿计算对应特征点的三角化位置。
取出Pose0、Pose1的旋转、平移,后续用来三角化出point0的point_3d,和由point_3d推的point1_reprojected
取出在该帧的观测:point0改为三维,加入depth,定义的时候u,v乘回depth。因为储存在observation_depth里的时候就是(u/depth,v/depth,depth)。
加个深度阈值判断。
如果都能被两帧看到,三角化该特征点:此时不用triangulatePoint()了,改成用point0的2D坐标投回3D坐标,再由两帧的相对R,T推到point1的3D坐标。因此定义残差residual,(从observation取的point1-point_3d推的point1_reprojected),来保证point_3d的正确性。此后9得到左帧的point_3d
(???为了增加三角化的可靠性,剔除太离谱的特征点)
assert(frame0 != frame1);
...
Vector2d point0;
...
for (int k = 0; k < (int)sfm_f[j].observation.size(); k++)
{
...
point0 = sfm_f[j].observation[k].second;
...
Vector3d point_3d;
triangulatePoint(Pose0, Pose1, point0, point1, point_3d);
assert(frame0 != frame1);
Matrix3d Pose0_R = Pose0.block< 3,3 >(0,0);
Matrix3d Pose1_R = Pose1.block< 3,3 >(0,0);
Vector3d Pose0_t = Pose0.block< 3,1 >(0,3);
Vector3d Pose1_t = Pose1.block< 3,1 >(0,3);
...
Vector3d point0;
...
for (int k = 0; k < (int)sfm_f[j].observation.size(); k++)
{
if (sfm_f[j].observation_depth[k].second < 0.1 || sfm_f[j].observation_depth[k].second >10) //max and min measurement
continue;
...
point0 = Vector3d(sfm_f[j].observation[k].second.x()*sfm_f[j].observation_depth[k].second,sfm_f[j].observation[k].second.y()*sfm_f[j].observation_depth[k].second,sfm_f[j].observation_depth[k].second);
...
Vector2d residual;
Vector3d point_3d, point1_reprojected;
point_3d = Pose0_R.transpose()*point0 - Pose0_R.transpose()*Pose0_t;//shan add:this is point in world;
point1_reprojected = Pose1_R*point_3d+Pose1_t;
residual = point1 - Vector2d(point1_reprojected.x()/point1_reprojected.z(),point1_reprojected.y()/point1_reprojected.z());
if (residual.norm() < 1.0/460){
sfm_f[j].state = true;
sfm_f[j].position[0] = point_3d(0);
sfm_f[j].position[1] = point_3d(1);
sfm_f[j].position[2] = point_3d(2);
}
construct()中,
该函数的目的是,对窗口中每个图像帧求解sfm问题,得到所有图像帧相对于参考帧C0的旋转四元数Q、平移向量T和特征点3d坐标
前面的三角化改用新的triangulateTwoFramesWithDepth(),即参考帧+关键帧、参考帧之后每一帧+关键帧、参考帧+参考帧之后每一帧(不包括当前帧)、参考帧之前的每一帧+参考帧
处理到三角化其他没有被三角化的特征点时,套用新的triangulateTwoFramesWithDepth()部分
triangulateTwoFrames(i, Pose[i], frame_num - 1, Pose[frame_num - 1], sfm_f);
...
triangulateTwoFrames(l, Pose[l], i, Pose[i], sfm_f);
...
triangulateTwoFrames(i, Pose[i], l, Pose[l], sfm_f);
...
Vector2d point0, point1;
int frame_0 = sfm_f[j].observation[0].first;
point0 = sfm_f[j].observation[0].second;
int frame_1 = sfm_f[j].observation.back().first;
point1 = sfm_f[j].observation.back().second;
Vector3d point_3d;
triangulatePoint(Pose[frame_0], Pose[frame_1], point0, point1, point_3d);
triangulateTwoFramesWithDepth(i, Pose[i], frame_num - 1, Pose[frame_num - 1], sfm_f);
...
triangulateTwoFramesWithDepth(l, Pose[l], i, Pose[i], sfm_f);
...
triangulateTwoFramesWithDepth(i, Pose[i], l, Pose[l], sfm_f);
...
Vector3d point0;
Vector2d point1;
int frame_0 = sfm_f[j].observation[0].first;
if (sfm_f[j].observation_depth[0].second < 0.1 || sfm_f[j].observation_depth[0].second > 10) //max and min measurement
continue;
point0 = Vector3d(sfm_f[j].observation[0].second.x()*sfm_f[j].observation_depth[0].second,sfm_f[j].observation[0].second.y()*sfm_f[j].observation_depth[0].second,sfm_f[j].observation_depth[0].second);
int frame_1 = sfm_f[j].observation.back().first;
point1 = sfm_f[j].observation.back().second;
Vector3d point_3d;
Matrix3d Pose0_R = Pose[frame_0].block< 3,3 >(0,0);
Matrix3d Pose1_R = Pose[frame_1].block< 3,3 >(0,0);
Vector3d Pose0_t = Pose[frame_0].block< 3,1 >(0,3);
Vector3d Pose1_t = Pose[frame_1].block< 3,1 >(0,3);
Vector2d residual;
Vector3d point1_reprojected;
point_3d = Pose0_R.transpose()*point0 - Pose0_R.transpose()*Pose0_t;//point in world;
point1_reprojected = Pose1_R*point_3d+Pose1_t;
residual = point1 - Vector2d(point1_reprojected.x()/point1_reprojected.z(),point1_reprojected.y()/point1_reprojected.z());
if (residual.norm() < 1.0/460) {//reprojection error
增加李代数相关库sophus的头文件
#include <sophus/se3.h>
#include <sophus/so3.h>
using Sophus::SE3;
using Sophus::SO3;
solveRelativeRT()中,
该函数的目的是,根据两帧匹配对求解R和带尺度的t
加一个打印ros日志
if(inlier_cnt > 12)
return true;
else
return false;
if(inlier_cnt > 12) {
ROS_ERROR_STREAM("----------5points-----------");
ROS_ERROR_STREAM(ll.size());
ROS_ERROR_STREAM(inlier_cnt);
ROS_ERROR_STREAM(Rotation);
ROS_ERROR_STREAM(Translation);
return true;
}
else
return false;
定义新的solveRelativeRT(),PnP,3D-2D
原本的左帧中的特征点ll,改为3D的lll,存放3d坐标
后续不用E矩阵恢复,改用cv库的pnp,参考十四讲7.8实践代码和【OpenCV】solvePnPRansac /solvePnP 计算外参数,求解相机位姿_guoqiang_sunshine的博客-CSDN博客_opencv solvepnp 参数
bool MotionEstimator::solveRelativeRT_PNP(const vector<pair<Vector3d, Vector3d>> &corres, Matrix3d &Rotation, Vector3d &Translation)
{
vector<cv::Point3f> lll;
vector<cv::Point2f> rr;
for (int i = 0; i< int(corres.size()); i++)
{
if (corres[i].first(2) >0 && corres[i].second(2) >0 ) {
lll.push_back(cv::Point3f(corres[i].first(0), corres[i].first(1), corres[i].first(2)));
rr.push_back(cv::Point2f(corres[i].second(0) / corres[i].second(2),
corres[i].second(1) / corres[i].second(2)));
}
}
cv::Mat rvec,tvec,inliersArr;
cv::Mat cameraMatrix = (cv::Mat_<double>(3, 3) << 1, 0, 0, 0, 1, 0, 0, 0, 1);
cv::solvePnPRansac(lll, rr, cameraMatrix, cv::Mat(), rvec, tvec, false, 100, 1.0/460, 0.99,
inliersArr, cv::SOLVEPNP_ITERATIVE);//maybe don't need 100times
Vector3d tran(tvec.at<double>(0, 0), tvec.at<double>(1, 0), tvec.at<double>(2, 0));
Matrix3d rota = SO3(rvec.at<double>(0, 0), rvec.at<double>(1, 0), rvec.at<double>(2, 0)).matrix();
ROS_DEBUG_STREAM("-----------pnp-----------");
ROS_DEBUG_STREAM(lll.size());
ROS_DEBUG_STREAM(inliersArr.rows);
Rotation = rota.transpose();
Translation = -rota.transpose() * tran;
ROS_DEBUG_STREAM(Rotation);
ROS_DEBUG_STREAM(Translation);
return true;
}
- utility文件夹里的h、cpp文件和feature_tracker一样的改动
三、pose_graph
class KeyFrame里,
加上了EIGEN_MAKE_ALIGNED_OPERATOR_NEW,用来提供对齐重载new宏,否则会因为内存未对齐就计算而报错。详情Eigen 内存对齐 - 知乎
KeyFrame实例里加上了vector<cv::Point3f> &_point_3d_depth,储存特征点的深度值
public:
KeyFrame(double _time_stamp, int _index, Vector3d &_vio_T_w_i, Matrix3d &_vio_R_w_i, cv::Mat &_image,
...
vector<cv::Point2f> point_2d_norm;
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
KeyFrame(double _time_stamp, int _index, Vector3d &_vio_T_w_i, Matrix3d &_vio_R_w_i, cv::Mat &_image, vector<cv::Point3f> &_point_3d_depth,
...
vector<cv::Point2f> point_2d_norm;
vector<cv::Point3f> point_3d_depth;
???在pose_graph_node.cpp和pose_graph.cpp里用到
extern Eigen::Matrix<double, 3, 1> ti_d;
extern Eigen::Matrix<double, 3, 3> qi_d;
增加了点云pcl相关头文件;
增加了滤波算法的接口:void pclFilter(); 点云相关指针Ptr cloud、Ptr save_cloud
增加了八叉树相关指针* octree、成员变量m_octree、ros发布pub_octree
#define SHOW_L_EDGE true
...
CameraPoseVisualization* posegraph_visualization;
...
...
std::mutex m_drift;
...
ros::Publisher pub_path[10];
...
#include <sensor_msgs/PointCloud2.h>
#include <sensor_msgs/point_cloud_conversion.h>
#include <pcl_conversions/pcl_conversions.h>
#include <pcl/point_cloud.h>
#include <pcl/octree/octree.h>
#include <pcl/octree/octree_impl.h>
#include <pcl/io/pcd_io.h>
#define SHOW_L_EDGE false
...
CameraPoseVisualization* posegraph_visualization;
void pclFilter(bool flag);
...
pcl::octree::OctreePointCloudDensity<pcl::PointXYZ>* octree;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud;
pcl::PointCloud<pcl::PointXYZ>::Ptr save_cloud;
...
std::mutex m_drift;
std::mutex m_octree;
...
ros::Publisher pub_path[10];
ros::Publisher pub_octree;
实例化KeyFrame的时候,加上_point_3d_depth;
computeBRIEFPoint()中,
该函数的目的是,给回环额外提取500个fast特征点并计算描述子
在出错的情况下用goodFeaturesToTrack()计算500个shi-tomasi角点,改为先用Fast()计算Fast角点,给出警报,再用goodFeaturesToTrack()计算50个shi-tomasi角点,在0.1的 品质因子下;(???为啥)
KeyFrame::KeyFrame(double _time_stamp, int _index, Vector3d &_vio_T_w_i, Matrix3d &_vio_R_w_i, cv::Mat &_image,
vector<cv::Point3f> &_point_3d, vector<cv::Point2f> &_point_2d_uv, vector<cv::Point2f> &_point_2d_norm,
vector<double> &_point_id, int _sequence)
...
point_2d_norm = _point_2d_norm;
...
else
{
vector<cv::Point2f> tmp_pts;
cv::goodFeaturesToTrack(image, tmp_pts, 500, 0.01, 10);
for(int i = 0; i < (int)tmp_pts.size(); i++)
KeyFrame::KeyFrame(double _time_stamp, int _index, Vector3d &_vio_T_w_i, Matrix3d &_vio_R_w_i, cv::Mat &_image,
vector<cv::Point3f> &_point_3d_depth, vector<cv::Point3f> &_point_3d, vector<cv::Point2f> &_point_2d_uv,
vector<cv::Point2f> &_point_2d_norm, vector<double> &_point_id, int _sequence)
...
point_2d_norm = _point_2d_norm;
point_3d_depth = _point_3d_depth;
...
else
{
cv::FAST(image, keypoints, fast_th, true);
ROS_ERROR("num of FAST: %d",(int)keypoints.size());
keypoints.clear();
vector<cv::Point2f> tmp_pts;
cv::goodFeaturesToTrack(image, tmp_pts, 50, 0.1, 10);
ROS_ERROR("num of good features: %d",(int)tmp_pts.size());
for(int i = 0; i < (int)tmp_pts.size(); i++)
增加滤波器相关头文件;
增加深度信息ROS暂存消息器depth_buf;
增加pcl相关变量。(ti_d、qi_d装相机外参(如果已知))
...
queue<sensor_msgs::ImageConstPtr> image_buf;
...
#include <message_filters/subscriber.h>
#include <message_filters/time_synchronizer.h>
#include <message_filters/synchronizer.h>
#include <message_filters/sync_policies/approximate_time.h>
...
queue<sensor_msgs::ImageConstPtr> image_buf,depth_buf;
...
float PCL_MAX_DIST, PCL_MIN_DIST, RESOLUTION;
int U_BOUNDARY, D_BOUNDARY, L_BOUNDARY, R_BOUNDARY;
int PCL_DIST;
Eigen::Matrix<double, 3, 1> ti_d;
Eigen::Matrix<double, 3, 3> qi_d;
主文件int main(int argc, char **argv)中,
加入depth的topic;
加入pcl相关的文件、实例化稠密八叉树Octree、点云cloud、保存点云save_cloud,并分别标注指向地址;
将cv类型矩阵(相机外参)cv_qid,、cv_tid用cv2eigen()转成Eigen形式的qi_d、ti_d;(???是因为用了pnp来三角化么)
原本的ROS订阅图像sub_image,改为rgbd的写法;(和feature_tracker_node.cpp的主函数改法一样,参照 ros消息时间同步与回调_kint_zhao的博客-CSDN博客
)
std::string IMAGE_TOPIC;
...
if (LOOP_CLOSURE)
{
ROW = fsSettings["image_height"];
COL = fsSettings["image_width"];
...
fsSettings["image_topic"] >> IMAGE_TOPIC;
...
FileSystemHelper::createDirectoryIfNotExists(POSE_GRAPH_SAVE_PATH.c_str());
FileSystemHelper::createDirectoryIfNotExists(VINS_RESULT_PATH.c_str());
...
ros::Subscriber sub_image = n.subscribe(IMAGE_TOPIC, 2000, image_callback);
std::string IMAGE_TOPIC,DEPTH_TOPIC;
...
if (LOOP_CLOSURE)
{
ROW = fsSettings["image_height"];
COL = fsSettings["image_width"];
PCL_DIST = fsSettings["pcl_dist"];
U_BOUNDARY = fsSettings["u_boundary"];
D_BOUNDARY = fsSettings["d_boundary"];
L_BOUNDARY = fsSettings["l_boundary"];
R_BOUNDARY = fsSettings["r_boundary"];
PCL_MIN_DIST = fsSettings["pcl_min_dist"];
PCL_MAX_DIST = fsSettings["pcl_max_dist"];
RESOLUTION = fsSettings["resolution"];
posegraph.octree = new pcl::octree::OctreePointCloudDensity<pcl::PointXYZ>(RESOLUTION);
posegraph.cloud = pcl::PointCloud<pcl::PointXYZ>::Ptr(new pcl::PointCloud<pcl::PointXYZ>());
posegraph.save_cloud = pcl::PointCloud<pcl::PointXYZ>::Ptr(new pcl::PointCloud<pcl::PointXYZ>());
posegraph.octree->setInputCloud(posegraph.cloud);
posegraph.octree->addPointsFromInputCloud();
posegraph.octree->defineBoundingBox(-100, -100, -100, 100, 100, 100);
...
fsSettings["image_topic"] >> IMAGE_TOPIC;
fsSettings["depth_topic"] >> DEPTH_TOPIC;
...
cv::Mat cv_qid, cv_tid;
fsSettings["extrinsicRotation"] >> cv_qid;
fsSettings["extrinsicTranslation"] >> cv_tid;
cv::cv2eigen(cv_qid, qi_d);
cv::cv2eigen(cv_tid, ti_d);
...
message_filters::Subscriber<sensor_msgs::Image> sub_image(n, IMAGE_TOPIC, 1);
message_filters::Subscriber<sensor_msgs::Image> sub_depth(n, DEPTH_TOPIC, 1);
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image,sensor_msgs::Image> syncPolicy;
message_filters::Synchronizer<syncPolicy> sync(syncPolicy(10), sub_image, sub_depth);
sync.registerCallback(boost::bind(&image_callback, _1, _2));
new_sequence()中,
该函数的目的是,开始一个新的图像序列(地图合并功能);
加入depth消息容器的清理。
while(!depth_buf.empty())
depth_buf.pop();
image_callback()中,
加入深度相关消息。
void image_callback(const sensor_msgs::ImageConstPtr &image_msg)
...
m_buf.lock();
image_buf.push(image_msg);
m_buf.unlock();
void image_callback(const sensor_msgs::ImageConstPtr &image_msg, const sensor_msgs::ImageConstPtr &depth_msg)
...
m_buf.lock();
image_buf.push(image_msg);
depth_buf.push(depth_msg);
m_buf.unlock();
回环主线程 process()中,
加入深度消息指针depth_msg,depth_buf的一系列处理跟着image_buf走;
sensor_msgs::ImageConstPtr image_msg = NULL;
...
while (image_buf.front()->header.stamp.toSec() < pose_msg->header.stamp.toSec())
image_buf.pop();
image_msg = image_buf.front();
image_buf.pop();
sensor_msgs::ImageConstPtr image_msg = NULL;
sensor_msgs::ImageConstPtr depth_msg = NULL;
...
while (image_buf.front()->header.stamp.toSec() < pose_msg->header.stamp.toSec())
{
image_buf.pop();
depth_buf.pop();
}
image_msg = image_buf.front();
depth_msg = depth_buf.front();
image_buf.pop();
depth_buf.pop();
增加以下,把depth的ros message也转成cv::Mat,放在image里,创造depth_ptr指针;(这里和feature_tracker_node.cpp的image_callback()一样的改法)
ptr = cv_bridge::toCvCopy(image_msg, sensor_msgs::image_encodings::MONO8);
...
cv::Mat image = ptr->image;
ptr = cv_bridge::toCvCopy(image_msg, sensor_msgs::image_encodings::MONO8);
cv_bridge::CvImageConstPtr depth_ptr;
{
sensor_msgs::Image img;
img.header = depth_msg->header;
img.height = depth_msg->height;
img.width = depth_msg->width;
img.is_bigendian = depth_msg->is_bigendian;
img.step = depth_msg->step;
img.data = depth_msg->data;
img.encoding = sensor_msgs::image_encodings::MONO16;
depth_ptr = cv_bridge::toCvCopy(img, sensor_msgs::image_encodings::MONO16);
}
...
cv::Mat image = ptr->image;
cv::Mat depth = depth_ptr->image;
增加定义特征点3d坐标的深度point_3d_depth容器;
在创建回环检测节点的KF前,将判断正确的深度值返回point_3d_depth容器;
判断方法:遍历所有点云,将像素坐标a转化为无畸变的归一化b(3d)。如果depth_val在阈值内,则将depth_val和b一起返回到point_3d_depth容器
实例化加入了深度值的KeyFrame为KeyFrame* keyframe。
vector<cv::Point2f> point_2d_normal;
...
KeyFrame* keyframe = new KeyFrame(pose_msg->header.stamp.toSec(), frame_index, T, R, image,
point_3d, point_2d_uv, point_2d_normal, point_id, sequence);
vector<cv::Point2f> point_2d_normal;
vector<cv::Point3f> point_3d_depth;
...
for (int i = L_BOUNDARY; i < COL - R_BOUNDARY; i += PCL_DIST)
{
for (int j = U_BOUNDARY; j < ROW - D_BOUNDARY; j += PCL_DIST)
{
Eigen::Vector2d a(i, j);
Eigen::Vector3d b;
m_camera->liftProjective(a, b);
float depth_val = ((float)depth.at<unsigned short>(j, i)) / 1000.0;
if (depth_val > PCL_MIN_DIST && depth_val < PCL_MAX_DIST)
{
point_3d_depth.push_back(cv::Point3f(b.x() * depth_val, b.y() * depth_val, depth_val));
}
}
}
KeyFrame* keyframe = new KeyFrame(pose_msg->header.stamp.toSec(), frame_index, T, R, image, point_3d_depth,
point_3d, point_2d_uv, point_2d_normal, point_id, sequence);
void command()中,
加入键盘控制"p"非pcl滤波模式、"d"保存点云为pcd格式
if (c == 'n')
new_sequence();
if (c == 'n')
new_sequence();
if (c == 'p')
{
TicToc t_filter;
posegraph.pclFilter(false);
printf("pclFilter time: %f", t_filter.toc());
}
if (c == 'd')
{
TicToc t_pcdfile;
posegraph.save_cloud->width = posegraph.save_cloud->points.size();
posegraph.save_cloud->height = 1;
pcl::io::savePCDFileASCII("/home/riger/pcd_file_"+to_string(frame_index)+"keyframes.pcd", *(posegraph.save_cloud));
printf("Save pcd file done! Time cost: %f", t_pcdfile.toc());
}
参考:PCL filter 点云滤波汇总_yamgyutou的博客-CSDN博客
加入声明外部变量RESOLUTION,分辨率参数,用于描述最低一级八叉树的最小体素的尺寸
extern float RESOLUTION;
registerPub()中
该函数的目的是,注册一些发布publisher。
加入八叉树的发布pub_octree。
pub_pose_graph = n.advertise<visualization_msgs::MarkerArray>("pose_graph", 1000);
pub_pose_graph = n.advertise<visualization_msgs::MarkerArray>("pose_graph", 1000);
pub_octree = n.advertise<sensor_msgs::PointCloud2>("octree", 1000);
addKeyFrame()中,
该函数的目的是,添加关键帧,完成回环检测与闭环的过程。
在可视化部分中,在发布path[sequence_cnt]之后添加点云可视化???
path[sequence_cnt].poses.push_back(pose_stamped);
path[sequence_cnt].header = pose_stamped.header;
path[sequence_cnt].poses.push_back(pose_stamped);
path[sequence_cnt].header = pose_stamped.header;
sensor_msgs::PointCloud2 tmp_pcl;//准备雷达点云格式转换
m_octree.lock();//八叉树容器锁上,不再往里加点云
int pcl_count_temp = 0;//点云索引值
for (unsigned int i = 0; i < cur_kf->point_3d_depth.size(); i++)//遍历当前帧所有特征点的3d坐标
{
cv::Point3f pcl = cur_kf->point_3d_depth[i];//临时存放某点坐标
Vector3d pts_i(pcl.x , pcl.y, pcl.z);//相机坐标系下的某点坐标
Vector3d w_pts_i = R * (qi_d * pts_i + ti_d) + P;//世界坐标系下的某点坐标
//为searchPoint点云填充点数据,由于上面的遍历,属于是循环填充数据了
pcl::PointXYZ searchPoint;//把某点的世界坐标系3d坐标给到pcl格式的searchPoint容器里,后续好转化为ROS格式
searchPoint.x = w_pts_i(0);
searchPoint.y = w_pts_i(1);
searchPoint.z = w_pts_i(2);
if (octree->getVoxelDensityAtPoint(searchPoint) < 5)//getVoxelDensityAtPoint(searchPoint):返回searchPoint点所在的叶节点的密度,即点云的个数。???这里是为了筛选合格的体素格,格内点云数小于5才能通过,否则还得继续分格子。
{
cur_kf->point_3d_depth[pcl_count_temp] = pcl;//合格格子内的点云坐标放回point_3d_depth
octree->addPointToCloud(searchPoint, cloud);//添加点searchPoint到点云cloud中
++pcl_count_temp;
}
}
cur_kf->point_3d_depth.resize(pcl_count_temp);//point_3d_depth重新统计特征点数目
pcl::toROSMsg(*(octree->getInputCloud()), tmp_pcl);//将sensor_msgs::PointCloud2转pcl::PointCloud,才能被ROS调用。直接调用pcl自带的函数
m_octree.unlock();//八叉树容器解锁,可以往里加点云
在ROS中订阅点云话题的时候,需要先将数据类型转换成PCL格式之后再做操作。这里直接调用pcl自带的函数pcl::fromROSMsg(),转成pcl点云,再进行降采样。???可以试试改成void *memcpy(void *dest, const void *src, size_t n);直接从地址提取部分点云,可以有效节省时间
pcl::toROSMsg(*(octree->getInputCloud()), tmp_pcl);//将sensor_msgs::PointCloud2转pcl::PointCloud,才能被ROS调用。直接调用pcl自带的函数
函数的最后,对齐pcl和pose的时间戳、关键帧id、原始数据类型,以及发布pub_octree八叉树话题
keyframelist.push_back(cur_kf);
publish();
m_keyframelist.unlock();
tmp_pcl.header = pose_stamped.header;
keyframelist.push_back(cur_kf);
publish();
pub_octree.publish(tmp_pcl);
m_keyframelist.unlock();
updatePath()中,
该函数的目的是,更新轨迹并发布。
加入TicToc t_update,因为存储更新 pcl 的信息而不锁定关键帧列表keyframe list,这可能需要很多时间 ;
加入tmp_keyframelist(临时装point_3d_depth)、tmp_RTlist(临时装配对的位姿P、R)、tmp_header(对齐?和pose的时间戳、关键帧id、原始数据类型);
...
(*it)->getPose(P, R);
...
pose_stamped.pose.orientation.w = Q.w();
...
path[(*it)->sequence].header = pose_stamped.header;
TicToc t_update;
vector<vector<cv::Point3f>> tmp_keyframelist;
queue<pair<Matrix3d, Vector3d>> tmp_RTlist;
std_msgs::Header tmp_header;
...
(*it)->getPose(P, R);
tmp_RTlist.push(make_pair(R, P));
...
pose_stamped.pose.orientation.w = Q.w();
tmp_keyframelist.push_back((*it)->point_3d_depth);
...
path[(*it)->sequence].header = pose_stamped.header;
tmp_header = pose_stamped.header;
加入octree八叉树和pcl部分,
参考PCL常用代码总结(二):kdtree & octree | 码农家园
以下是,将花费算力多的扔出m_keyframelist。
publish();
m_keyframelist.unlock();
publish();
m_keyframelist.unlock();
m_octree.lock();
octree->deleteTree();
cloud->clear();
//添加cloud到八叉树,建立八叉树
octree->setInputCloud(cloud);//传入需要建立kdtree的点云指针
octree->addPointsFromInputCloud(); //构建Octree
//定义八叉树的包围盒
octree->defineBoundingBox(-100, -100, -100, 100, 100, 100);
int update_count = 0;//更新次数
for (auto &pcl_vect : tmp_keyframelist)//遍历tmp_keyframelist,取向量为pcl_vect
{
Vector3d P;
Matrix3d R;
//每个元素的P、R放入tmp_RTlist最前端,往前顶
R = tmp_RTlist.front().first;
P = tmp_RTlist.front().second;
for (auto &pcl : pcl_vect)//遍历pcl_vect,取向量为pcl。下面的就和addKeyFrame()一样,填充数据
{
Vector3d pts_i(pcl.x , pcl.y, pcl.z);
Vector3d w_pts_i = R * (qi_d * pts_i + ti_d) + P;
pcl::PointXYZ searchPoint;
searchPoint.x = w_pts_i(0);
searchPoint.y = w_pts_i(1);
searchPoint.z = w_pts_i(2);
++update_count;
octree->addPointToCloud(searchPoint, cloud);
}
tmp_RTlist.pop();
}
pclFilter(true);//滤波器模式
m_octree.unlock();
ROS_INFO("Update done! Time cost: %f total points: %d", t_update.toc(), update_count);
void PoseGraph::pclFilter(bool flag)是新增加的,在updatePath()最后部分用到
该函数的目的是,???对点云降采样,太稠密了计算机算不过来。
void PoseGraph::pclFilter(bool flag)
{
pcl::PointCloud<pcl::PointXYZ> cloud_copy(*(octree->getInputCloud()));//octree的点云数据装入cloud_copy
pcl::octree::OctreePointCloudDensity<pcl::PointXYZ>* temp_octree = new pcl::octree::OctreePointCloudDensity<pcl::PointXYZ>(RESOLUTION);//实例化一个新的八叉树
pcl::PointCloud<pcl::PointXYZ>::Ptr temp_cloud = pcl::PointCloud<pcl::PointXYZ>::Ptr(new pcl::PointCloud<pcl::PointXYZ>());//设定pcl指针temp_cloud指向点云的坐标容器,即将点云转换为指针格式
cout<<"Size of Cloud before filter:"<<cloud_copy.size()<<endl;
pcl::PointCloud<pcl::PointXYZ>::iterator pcl_iter= cloud_copy.begin();//取排头的点云为pcl_iter
while(pcl_iter != cloud_copy.end())//循环处理cloud_copy中每个点云
{
// 体素格内的点云数大于3,该点云才返回到temp_cloud里
if (octree->getVoxelDensityAtPoint(*pcl_iter) >= 3)
{
temp_cloud->push_back(*pcl_iter);
}
++pcl_iter;
}
temp_octree->defineBoundingBox(-100, -100, -100, 100, 100, 100);
temp_octree->setInputCloud(temp_cloud);//传入需要建立kdtree的点云指针
temp_octree->addPointsFromInputCloud();//构建temp_octree
cout<<"Size of Cloud after filter:"<<temp_cloud->size()<<endl;
if (flag)
{
//lock octree and cloud
delete octree;
(*cloud).clear();
octree = temp_octree;
cloud = temp_cloud;
}
else//不会用到
{
sensor_msgs::PointCloud2 tmp_pcl;
pcl::toROSMsg(*temp_cloud, tmp_pcl);
tmp_pcl.header.stamp = ros::Time::now();
tmp_pcl.header.frame_id = "world";
pub_octree.publish(tmp_pcl);
}
}
savePoseGraph()中,
增加了轨迹文件file_path_shan_pg、file_path_shan_vio。???显示自己跑的数据集的轨迹
具体看代码
结束
至此,rgbd添加结束。后续会试试算法裁剪和加线特征
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)