虚拟机搭载Ubuntu18.04调用笔记本的摄像头(踩坑以及解决方法)
一、建立工作空间(略)
这里我建立的工作空间名称是catkin_ones
二、下载usb_cam包并进行编译
git clone https:
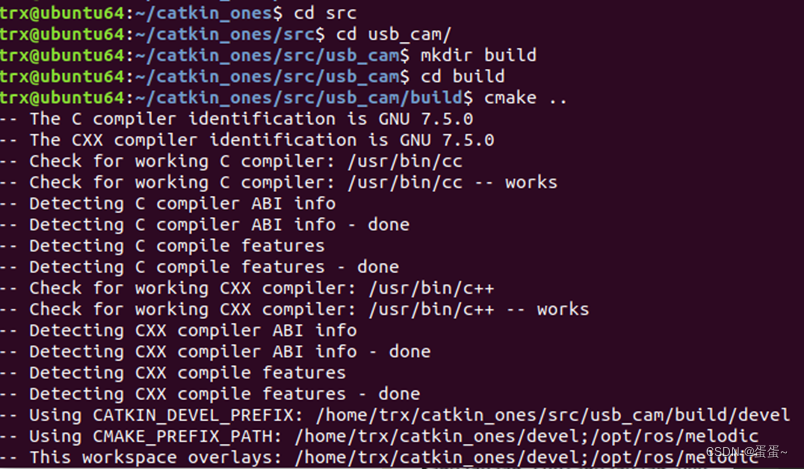
cd usb_cam
mkdir build
cd build
cmake ..
三、硬件设置和踩坑记录
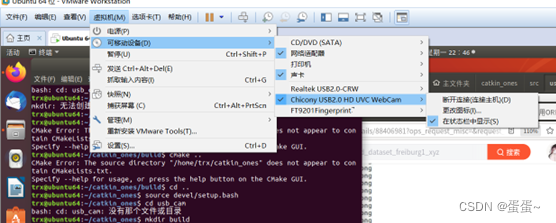
点击虚拟机的可移动设备将摄像头与主机断开连接至虚拟机
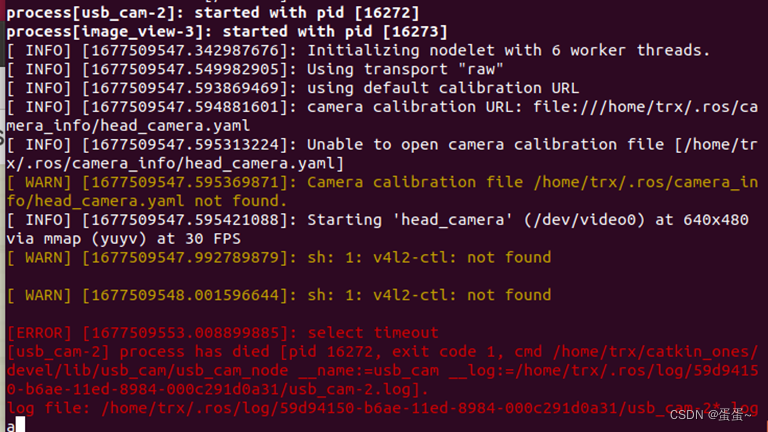
运行usb_cam里例程launch时发现摄像头闪了一下,无法启动并出现报错。
在硬件出调整usb兼容性将2.0改成3.1.由于我的VM版本是12.0版本过低,调整后只要开启虚拟机便会出现系统崩溃蓝屏现象。这是由于VM版本过低导致与硬件兼容性出现了问题。从官网下载最新版本就可以解决。不需要卸载本身低版本的VM,在安装高版本时低版本会被覆盖。
下载地址
https:
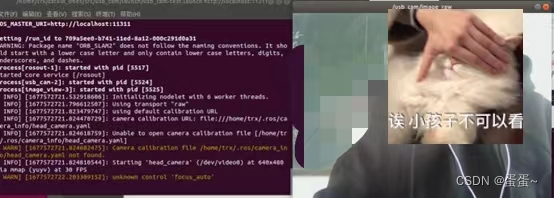
进入后重新运行,同样的需要将摄像头连接至虚拟机并且将USB兼容性修改至USB3.1,此时再重新roslaunch就能够打开摄像头。
roslaunch usb_cam usb_cam-test.launch
相机标定
sudo apt-get install ros-melodic-camera-calibration

需要准备一张张友正标定版进行摄像头内参标定。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)