文章目录
- 一、字符设备驱动介绍
-
- 二、设备号
- 1.设备号介绍
- 2.分配与释放设备编号
- ①dev_t类型
- ②静态分配设备号
- ③动态分配设备号
- ④释放主次设备号
- ⑤手动创建设备节点
- ⑥自动创建设备节点
- ⑦删除设备节点
- 三、字符设备注册
-
- 三、字符设备驱动开发与测试
- 1.字符设备驱动
- 2.字符设备测试程序
- 3.Makefile
- 4.驱动测试
- 总结
一、字符设备驱动介绍
1.设备驱动介绍
Linux内核将设备按照访问特性一般分为三类:字符设备、块设备、网络设备:
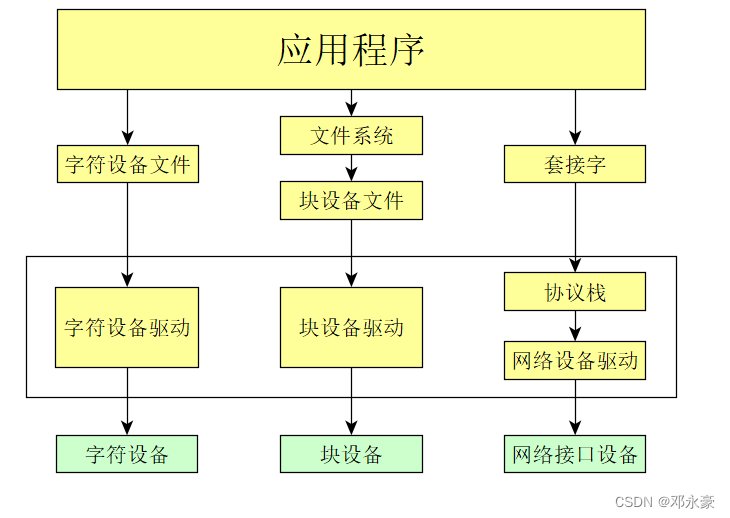
详细的学习字符设备驱动框架之前,我们先来简单的了解一下Linux下的应用程序是如何调用驱动程序的,Linux应用程序对驱动的调用如图如所示:

应用程序运行在用户空间,Linux驱动属于内核的一部分,运行于内核空间,要是用户想要实现对内核的操作,那么他必须使用系统调用来实现从用户空间到内核空间的操作。
二、设备号
1.设备号介绍
设备号(device number)是用于唯一标识Linux系统中的一个设备的数字,包括主设备号(major number)和次设备号(minor number)。主设备号用于标识设备驱动程序,次设备号用于标识同一驱动程序下的不同设备实例。
设备节点(device node)是用于在文件系统中表示设备的特殊文件。设备节点通常位于/dev目录下,其文件名由设备类型和设备号组成,通过设备节点,应用程序可以与设备进行交互,如打开、读取、写入等操作。
在/dev路径下可以通过ls -l查看设备节点:

其中可以举例:
crw-rw---- 1 root video 29, 0 4月 16 10:30 fb0
- c: 表示这是一个字符设备文件。
- rw-rw----: 文件权限,代表文件所有者和所属组有读写权限,其他用户没有任何权限。
- 1: 确定这个设备文件的硬链接数。
- root: 文件所有者为root。
- video: 文件所属video组。
- 29, 0: 设备号,代表这是主设备号为 29,次设备号为 0 的设备。
- 4月 16 10:30: 文件的最后修改时间。
- fb0: 设备文件名,代表此文件是第一个帧缓冲设备的字符设备文件。
2.分配与释放设备编号
①dev_t类型
在内核编程中,dev_t 是一个在 Linux 内核中用来表示设备号的数据类型。它实际上是一个 32 位整数,其中高 12 位是主设备号,低 20 位是次设备号。主设备号用于指示设备类型,而次设备号用于区分同一类型下的不同设备。在编码时,我们不应该管哪些位是主设备号,哪些位是次设备号。而是应当利用在<linux/kdev_t.h>中的一套宏定义来获取一个dev_t的主、次编号:
#define MINORBITS 20
#define MINORMASK ((1U << MINORBITS) - 1)
#define MAJOR(dev) ((unsigned int) ((dev) >> MINORBITS))
#define MINOR(dev) ((unsigned int) ((dev) & MINORMASK))
#define MKDEV(ma,mi) (((ma) << MINORBITS) | (mi))
- 宏 MKDEV 用于将给定的主设备号和次设备号的值组合成 dev_t 类型的设备号。
- 宏 MINORBITS 表示次设备号位数,一共是 20 位。
- 宏 MINORMASK 表示次设备号掩码。
- 宏 MAJOR 用于从 dev_t 中获取主设备号,将 dev_t 右移 20 位即可。
- 宏 MINOR 用于从 dev_t 中获取次设备号,取 dev_t 的低 20 位的值即可。
②静态分配设备号
静态分配设备号是指在代码中手动指定设备号的方法。开发者在注册字符设备时,需要指定主设备号和次设备号,如果开发者已经确定了设备号,可以使用静态分配设备号的方式。当然对于设备号我们自己随机选择的话,会跟Linux内核其他的驱动冲突,这时我们可以先查看当前系统已经使用了哪些主设备号,然后我们选择一个没有使用的作为我们新的驱动使用。Linux系统中正在使用的主设备号会保存在/proc/devices文件中:
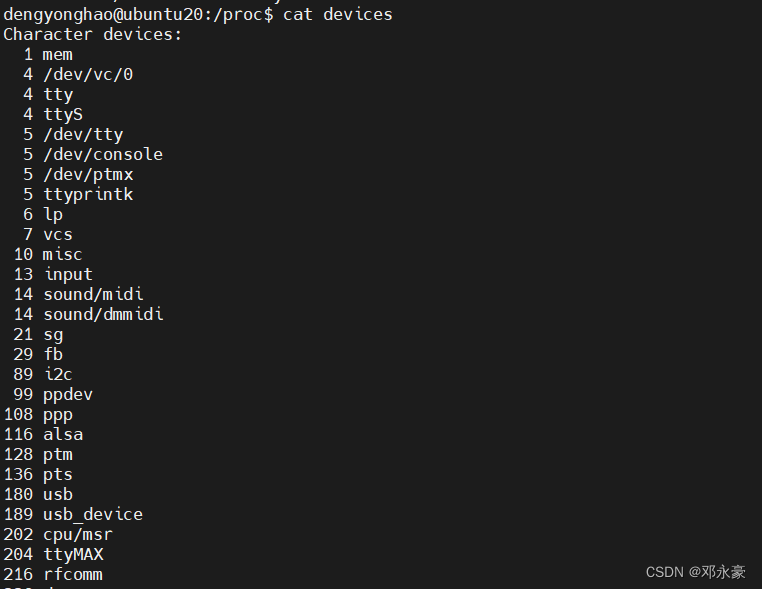
上面列出来的是Linux内核里所有驱动使用的主设备号,我们在编写设备时就可以选定一个未用的主设备号。
静态分配设备号需要开发者手动指定设备号,保证每个设备号都唯一。在代码中通过调用 register_chrdev_region() 函数进行注册。这个函数的第一个参数是主设备号,第二个参数是设备数量,第三个参数是设备名,在/proc/devices和sysfs中。 register_chrdev_region() 函数成功返回0,失败返回一个负数:
dev_t devno;
int result;
int major = 251;
devno = MKDEV(major, 0);
result = register_chrdev_region(devno, 4, "chrdev");
if(result < 0)
{
printk(KERN_ERR "chrdev can't use major %d\n", major);
return -ENODEV;
}
当驱动的主、次设备号申请成功后,/proc/devices里将会出现该设备,但是/dev路径下并不会创建该设备文件,需要我们去创建设备节点。
静态分配设备号的优点是使用方便,可以确保设备号的唯一性。缺点是如果设备数量不够,就会浪费设备号资源,而如果设备数量过多,又会导致设备号的耗尽。因此,在静态分配设备号时,需要谨慎考虑设备数量,以及设备号的合理使用。
③动态分配设备号
我们通过静态分配设备号很容易带来冲突问题,如果以后我们Linux内核升级需要使能其他的设备驱动时,如果需要的驱动和我们所用的主设备号冲突,那么我们就不得不对这个主设备号进行调整,如果产品已经部署了,这种召回升级是十分致命的,所以我们写驱动的之后应该由Linux内核根据当前主设备号使用情况动态分配一个未用的给我们的设备驱动,这样就不会发生冲突的情况了。
int alloc_chrdev_region(dev_t *dev, unsigned baseminor, unsigned count, const char *name)
参数说明:
- dev:用于返回分配的设备号。
- firstminor:要分配的第一个次设备号,它常常是0。
- count:要分配的设备号数量。
- name:设备名字。
动态分配的缺点是你无法提前创建设备节点,因为分配给你的主设备号会发生变化,对于驱动的正常使用这不是问题,但是一旦编号分配了,只能通过 查看 /proc/devices文件才能知道它的值,然后再创建设备节点。
④释放主次设备号
注销字符设备后要释放设备号,设备号释放函数如下:
void unregister_chrdev_region(dev_t from, unsigned count)
使用该函数可以将之前通过 register_chrdev_region() 函数注册的设备号从系统中取消,以便于其他设备可以使用这些设备号。通常在模块的卸载函数xxx__exit中调用该函数,释放模块使用的设备号资源。
⑤手动创建设备节点
如果我们需要创建该文件,则需要使用mknod命令创建。当然我们也可以在驱动里调用相应的函数,来通知应用程序空间自动创建该设备文件。
mknod /dev/chrdevbase c 251 0
- “mknod”是创建节点命令
- “/dev/chrdevbase”是要创建的节点文件
- “c”表示这是个字符设备
- “251”是设备的主设备号
- “0”是设备的次设备号
例如 chrdevbaseAPP 想要读写 chrdevbase 设备,直接对/dev/chrdevbase进行读写操作即可。相当于/dev/chrdevbase这个文件是 chrdevbase 设备在用户空间中的实现。
⑥自动创建设备节点
在Linux中,可以通过udev(userspace dev)来实现自动创建设备节点,当然前提条件是用户空间移植了udev。udev是Linux系统中的一个动态设备管理机制,它负责在系统启动时检测硬件设备的插拔并创建相应的设备节点。
当udev检测到新设备插入时,它会执行一系列规则(rules)来确定设备应该如何创建,这些规则定义了设备节点的名称、权限等信息,并使用mknod系统调用来创建设备节点。这些规则通常存储在/etc/udev/rules.d/目录中的文件中,每个文件包含一组规则。
class_create():在调用device_create()前要先用class_create()创建一个类(设备依附的类)。类这个概念在Linux中被抽象成一种设备的集合。类在/sys/class目录中。class_create()这个函数使用非常简单,在内核中是一个宏定义,定义在/include/linux/device.h中:
#define class_create(owner, name) \
({ \
static struct lock_class_key __key; \
__class_create(owner, name, &__key); \
})
此函数有两个参数:
- owner:struct module结构体类型的指针,一般赋值为THIS_MODULE。
- name:char类型的指针,类名。
device_create():用于创建设备节点,其定义在/include/linux/device.h中,函数原型如下:
struct device *device_create(struct class *class, struct device *parent, dev_t devt, void *drvdata, const char *fmt, ...)
{
va_list vargs;
struct device *dev;
va_start(vargs, fmt);
dev = device_create_vargs(class, parent, devt, drvdata, fmt, vargs);
va_end(vargs);
return dev;
}
- class:该设备依附的类
- parent:父设备
- devt:设备号(此处的设备号为主次设备号)
- drvdata:私有数据
- fmt:设备名
device_create能自动创建设备文件是依赖于udev这个应用程序,使用udev后,在/dev目录下就只包含系统中真正存在的设备。
⑦删除设备节点
device_destroy()函数用于销毁一个设备节点,并释放相关的资源。定义在/include/linux/device.h中:
void device_destroy(struct class *class, dev_t devt)
{
struct device *dev;
dev = class_find_device(class, NULL, &devt, exact_match);
if (dev)
device_destroy(dev);
}
参数说明:
- class:指向struct class类型的指针,表示设备节点所属的设备类。
- devt:表示设备号。
函数class_destroy()用于从Linux内核系统中删除设备。此函数执行的效果是删除函数class_create()在/sys/class目录下创建的节点对应的文件夹,定义在/include/linux/device.h中:
void class_destroy(struct class *cls)
{
if ((cls == NULL) || (IS_ERR(cls)))
return;
class_unregister(cls);
}
参数说明:
- cls:struct class结构体类型的变量,代表通过class_create创建的设备的节点。
自动创建节点示例:
static struct class *my_class;
static struct device *my_device;
static int __init my_driver_init(void)
{
my_class = class_create(THIS_MODULE, "my_class");
my_device = device_create(my_class, NULL, MKDEV(MAJOR_NUM, MINOR_NUM), NULL, "my_device");
return 0;
}
static void __exit my_driver_exit(void)
{
device_destroy(my_class, MKDEV(MAJOR_NUM, MINOR_NUM));
class_destroy(my_class);
}
module_init(my_driver_init);
module_exit(my_driver_exit);
三、字符设备注册
1.cdev结构体
内核在内部使用类型struct cdev的结构体来代表字符设备。在内核调用你的设备操作之前,你必须分配一个这样的结构体并注册给linux内核,在这个结构体里有对于这个设备进行操作的函数,具体定义在file_operation结构体中。该结构体定义在include/linux/cdev.h文件中:
struct cdev {
struct kobject kobj;
struct module *owner;
const struct file_operations *ops;
struct list_head list;
dev_t dev;
unsigned int count;
};
- kobj:kobject结构体,用于表示cdev对象在内核中的内存管理等方面的信息。
- owner:指向内核模块的指针,表示注册这个cdev结构体的内核模块。
- ops:指向字符设备驱动的file_operations结构体。
- list:链表节点,用于将多个cdev结构体链接在一起。
- dev:字符设备的设备号。
- count:用于表示同一设备实例的数量,通常为1。
在内核编程中,我们可以使用两种方法获取结构体。
一是运行时想获取一个独立的cdev结构:
struct cdev *chrtest;
if(NULL == chrtest = cdev_alloc())
{
printk(KERN_ERR "S3C %s driver can't alloc for the cdev.\n", DEV_NAME);
unregister_chrdev_region_region(devno, dev_vount);
return -ENOMEM;
}
chrtest->ops = &my_fops;
但是,偶尔你会想将cdev结构体嵌入一个你自己的设备特定结构。这样的情况下你需要初始化已经分配的结构体:
cdev_init(struct cdev *dev, struct file_operations *fops);
struct cdev有一个拥有者成员,应当设置为THIS_MODULE,一旦cdev结构建立,最后的步骤就是告诉内核。
2.注册cdev到内核
分配到cdev结构体后,我们将它初始化,并将对该设备驱动所支持的系统调用函数存放在file_operations结构体添加进来。然后用途cdev_add函数将它注册到内核,从而完成一个完整的Linux设备注册过程。
cdev_add函数原型如下:
int cdev_add(struct cdev *p, dev_t dev, unsigned int count);
其中,参数含义如下:
- p:指向要添加的字符设备对象的 cdev 结构体指针。
- dev:指定要添加的设备号。
- count:指定添加的设备号的数量。
字符设备驱动cdev的分配和注册示例:
static struct file_operations chrtest_fods =
{
.owner = THIS_MODULE,
.open = chrtest_open,
.release = chrtest_release,
.unlocked_ioctl = chrtest_ioctl,
};
struct cdev *chrtest_cdev;
if(NULL == (led_cdev = cdev_alloc))
{
printk(KERN_ERR "S3C %s driver can't alloc for the cdev.\n", DEV_NAME);
unregister_chdev_region(devno, dev_count);
return -ENOMEM;
}
led_cdev->owner = THIS_MODULE;
cdev_init(led_cdev, &led_fops);
result = cdev_add(led_cdev, devno, dev_count);
if(0 != result)
{
printk(KERN_INFO "S3C %s drive can't register cdev:result = %d\n", DEV_NAME, result);
goto ERROR;
}
三、字符设备驱动开发与测试
1.字符设备驱动
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#ifndef DEV_MAJOR
#define DEV_MAJOR 0
#endif
int dev_major = DEV_MAJOR;
#define DEV_NAME "chrdev"
static struct cdev *chrtest_cdev;
static char kernel_buf[1024];
#define MIN(a,b) (a < b ? a : b)
static ssize_t chrtest_drv_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_to_user(buf, kernel_buf, MIN(1024, size));
return MIN(1024, size);
}
static ssize_t chrtest_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_from_user(kernel_buf, buf, MIN(1024, size));
return MIN(1024, size);
}
static int chrtest_drv_open(struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
static int chrtest_drv_close(struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
static struct file_operations chrtest_fops = {
.owner = THIS_MODULE,
.open = chrtest_drv_open,
.read = chrtest_drv_read,
.write = chrtest_drv_write,
.release = chrtest_drv_close,
};
static int __init chrdev_init(void)
{
int result;
dev_t devno;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
if(0 != dev_major)
{
devno = MKDEV(dev_major, 0);
result = register_chrdev_region(devno, 1, DEV_NAME);
}
else
{
result = alloc_chrdev_region(&devno, 0, 1, DEV_NAME);
dev_major = MAJOR(devno);
}
if(result < 0)
{
printk(KERN_ERR " %s driver can't use major %d\n", DEV_NAME, dev_major);
return -ENODEV;
}
printk(KERN_DEBUG " %s driver can't use major %d\n", DEV_NAME, dev_major);
if(NULL == (chrtest_cdev = cdev_alloc()))
{
printk(KERN_ERR " %s driver can't alloc for the cdev\n", DEV_NAME);
unregister_chrdev_region(devno, 1);
return -ENOMEM;
}
chrtest_cdev->owner = THIS_MODULE;
cdev_init(chrtest_cdev, &chrtest_fops);
result = cdev_add(chrtest_cdev, devno, 1);
if(0 != result)
{
printk(KERN_INFO "%s driver can't register cdev:result=%d\n", DEV_NAME, result);
goto ERROR;
}
printk(KERN_INFO "%s driver can register cdev:result=%d\n", DEV_NAME, result);
#if 0
chrdev_class = class_create(THIS_MODULE, DEV_NAME);
if(IS_ERR(chrdev_class))
{
result = PTR_ERR(chrdev_class);
goto ERROR;
}
device_create(chrdev_class, NULL, MKDEV(dev_major, 0), NULL, DEV_NAME);
#endif
return 0;
ERROR:
printk(KERN_ERR" %s driver installed failure.\n", DEV_NAME);
cdev_del(chrtest_cdev);
unregister_chrdev_region(devno, 1);
return result;
}
static void __exit chrdev_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
#if 0
device_destroy(chrdev_class, NKDEV(dev_major, 0));
class_destroy(chrdev_class);
#endif
cdev_del(chrtest_cdev);
unregister_chrdev_region(MKDEV(dev_major, 0), 1);
printk(KERN_ERR"%s driver version 1.0.0 removed!\n", DEV_NAME);
return;
}
module_init(chrdev_init);
module_exit(chrdev_exit);
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("DengYonghao <dengyonghao2001@163.com>");
2.字符设备测试程序
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
int main (int argc, char **argv)
{
int fd;
char buf[1024];
int len;
if(argc < 2)
{
printf("Usage: %s -w <string>\n", argv[0]);
printf(" %s -r\n", argv[0]);
return -1;
}
fd = open("/dev/chrdev", O_RDWR);
if(fd == -1)
{
printf("can not open file /dev/hello\n");
return -1;
}
if((0 == strcmp(argv[1], "-w")) && (argc == 3))
{
len = strlen(argv[2]) + 1;
len = len < 1024 ? len :1024;
write(fd, argv[2], len);
}
else if((0 == strcmp(argv[1], "-r")) && (argc == 2))
{
len = read(fd, buf, 1024);
buf[1023] = '\0';
printf("APP read : %s\n", buf);
}
else
{
printf("Usage: %s -w <string>\n", argv[0]);
printf(" %s -r\n", argv[0]);
return -1;
}
close(fd);
return 0;
}
3.Makefile
KERNEL_DIR := /home/dengyonghao/project/IGKdriver/imx6ull/bsp/kernel/linux-imx
COROSS_COMPILE := /opt/gcc-arm-10.3-2021.07/bin/arm-none-linux-gnueabihf-
TFTP_DIR := ../../../IGKBoard/tftpboot
PWD := $(shell pwd)
obj-m := chrdevbase.o
modules:
$(MAKE) -C $(KERNEL_DIR) M=$(PWD) modules
$(COROSS_COMPILE)gcc chrdevbaseApp.c -o chrdevbaseApp
@make clear
cp chrdevbase.ko chrdevbaseApp $(TFTP_DIR) -f
clear:
@rm -f *.o *.cmd *.mod *.mod.c
@rm -rf *~ core .depend .tmp_versions Module.symvers modules.order -f
@rm -f *ko.cmd .*.o.cmd .*.o.d
@rm -f *.unsigned
clean:
@rm -f *.ko
4.驱动测试
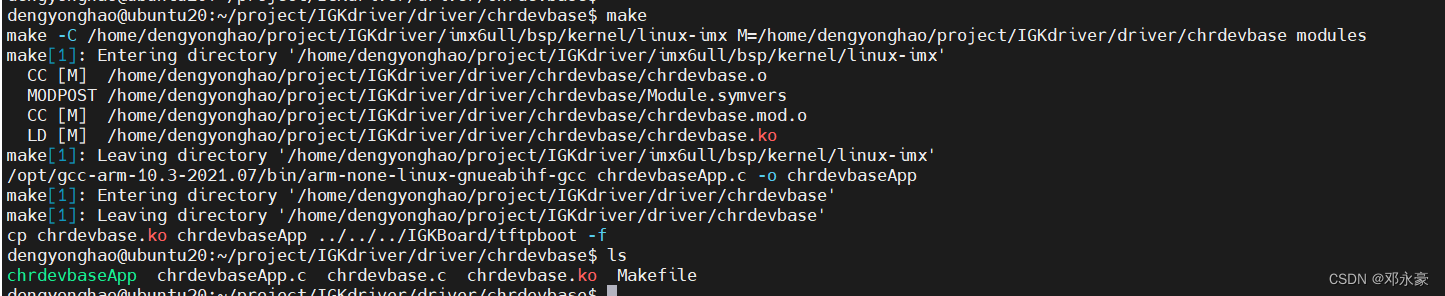
首先make编译好我们所需要的字符设备驱动程序和字符设备测试程序:
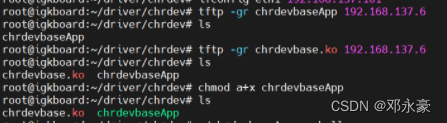
通过tftp下载到IGKBoard开发板中,并为测试程序赋予可执行权限:
通过insmod加载字符驱动模块到内核中去,并查看注册的字符设备:


然后运行测试程序可见提示信息,由于我们还没有设备节点,这里我们手动添加:

当然我们在代码中也写了自动创建的方式,可以通过修改代码实现自动创建设备节点。
最后再次运行测试程序:

在内核中,字符设备文件会被映射到设备号,而设备号会与字符设备驱动程序中的 file_operations 结构体关联,其中的write 函数用于向字符设备写入数据 read 函数用于从字符设备读取数据,也就是我们的-w和-r参数分别向字符设备写入字符串“hello”和读取字符设备中的数据,可见测试成功。
总结
字符设备驱动是 Linux 中驱动开发的一类,用于控制字符设备的行为。在字符设备驱动开发过程中,需要分配和释放设备号,使用 cdev 结构体注册字符设备到内核,提供 file_operations 结构体中的方法来对设备进行操作。
在设备号的分配和释放方面,有多种方式,包括静态分配和动态分配。使用动态分配时,需要使用 dev_t 类型来表示设备号,并调用相关函数进行分配和释放。同时,还可以手动创建设备节点或者使用 udev 自动创建设备节点。
在字符设备注册方面,需要使用 cdev 结构体,将设备号和 file_operations 结构体中的方法与其绑定,再通过调用 cdev_add() 函数将其注册到内核中。
最后,为了测试字符设备驱动,我编写了测试程序。在测试程序中,使用 open() 函数打开设备节点,使用 read() 和 write() 函数进行读写操作。通过测试程序,我们可以验证字符设备驱动的功能是否正常。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)