文章目录
- 信号量
- 1 信号量
- 1.1 信号量的概述
- 1.2 信号量的API
- 1.2.1 初始化信号量
- 1.2.2 信号量减一(P操作)
- 1.2.3 尝试对信号量减一
- 1.2.4 信号量加一(V操作)
- 1.2.5 销毁信号量
- 1.3 代码示例
- 1.3.1 信号量用于线程的互斥
- 1.3.2 信号量用于线程的同步
- 2 无名信号量用于有血缘关系的进程间互斥与同步
- 2.1 代码示例
- 2.1.1 无名信号量用于有血缘关系的进程间互斥
- 2.1.2 无名信号量用于有血缘关系的进程间同步
- 3 有名信号量用于无血缘关系的进程间互斥与同步
- 3.1 有名信号量的API
- 3.1.1 创建一个有名信号量
- 3.1.2 信号量的关闭
- 3.1.3 信号量文件的删除
- 3.2 代码示例
- 3.2.1 有名信号量用于无血缘关系的进程间互斥
- 3.2.2 有名信号量用于无血缘关系的进程间同步
信号量
1 信号量
1.1 信号量的概述
信号量广泛用于进程或线程间的同步和互斥,信号量本质上是一个非负的整数计数器,它被用来控制对公共资源的访问。编程时可根据操作信号量值的结果判断是否对公共资源具有访问的权限,当信号量值大于0时,则可以访问,否则将阻塞。PV原语是对信号量的操作,一次Р操作使信号量减1,一次V操作使信号量加1。信号量主要用于进程或线程间的同步和互斥这两种典型情况。
信号量数据类型为: sem_t。
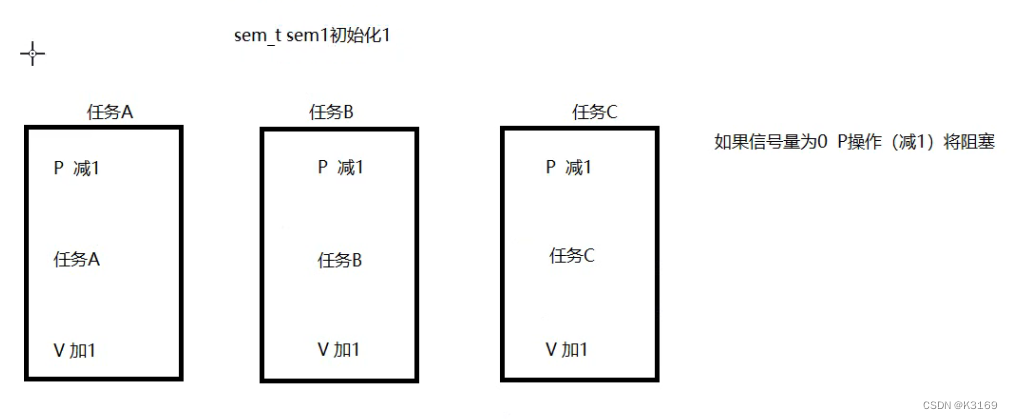
信号量用于互斥:
不管多少个任务互斥,只需要一个信号量。先P操作,再V操作
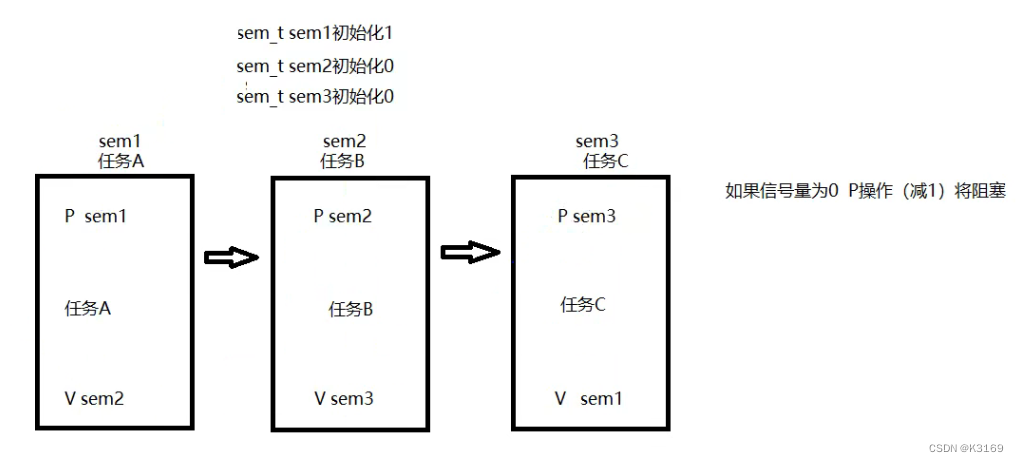
信号量用于同步:
有多少个任务,就需要多少个信号量。最先执行的任务对应的信号量为1,其他信号量全部为0。
执行任务时,先P执行任务,执行完再V下一个执行任务
1.2 信号量的API
1.2.1 初始化信号量
创建一个信号量并初始化它的值。一个无名信号量在被使用前必须先初始化
#include <semaphore.h>
int sem_init(sem_t *sem, int pshared, unsigned int value)
参数:
sem:信号量的地址
pshared:等于0,信号量在线程间共享(常用);
不等于0,信号量在进程共享。
value:信号量的初始值
返回值:
成功:0
失败:-1
1.2.2 信号量减一(P操作)
将信号量减一,如果信号量的值为0则阻塞,大于0可以减一
#include <semaphore.h>
int sem_wait(sem_t *sem);
参数:
sem:信号量的地址
返回值:
成功:0
失败:-1
1.2.3 尝试对信号量减一
尝试将信号量减一,如果信号量的值为0,不阻塞,立即返回,大于0可以减一
#include <semaphore.h>
int sem_trywait(sem_t *sem);
参数:
信号量的地址
返回值:
成功:0
失败:-1
1.2.4 信号量加一(V操作)
将信号量加一
#include <semaphore.h>
int sem_post(sem_t *sem);
参数:
信号量的地址
返回值:
成功:0
失败:-1
1.2.5 销毁信号量
销毁信号量
#include <semaphore.h>
int sem_destroy(sem_t *sem);
参数:
信号量的地址
返回值:
成功:0
失败:-1
1.3 代码示例
1.3.1 信号量用于线程的互斥
#include <stdio.h>
#include <pthread.h>
#include <semaphore.h>
#include <unistd.h>
sem_t sem;
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
void *task_fun01(void *arg)
{
sem_wait(&sem);
my_printf((char *)arg);
sem_post(&sem);
return NULL;
}
void *task_fun02(void *arg)
{
sem_wait(&sem);
my_printf((char *)arg);
sem_post(&sem);
return NULL;
}
void *task_fun03(void *arg)
{
sem_wait(&sem);
my_printf((char *)arg);
sem_post(&sem);
return NULL;
}
int main(int argc, char const *argv[])
{
sem_init(&sem, 0, 1);
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, task_fun01, "hello");
pthread_create(&tid2, NULL, task_fun02, "world");
pthread_create(&tid3, NULL, task_fun03, "beijing");
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
sem_destroy(&sem);
return 0;
}

1.3.2 信号量用于线程的同步
#include <stdio.h>
#include <pthread.h>
#include <semaphore.h>
#include <unistd.h>
sem_t sem1;
sem_t sem2;
sem_t sem3;
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
void *task_fun01(void *arg)
{
sem_wait(&sem1);
my_printf((char *)arg);
sem_post(&sem2);
return NULL;
}
void *task_fun02(void *arg)
{
sem_wait(&sem2);
my_printf((char *)arg);
sem_post(&sem3);
return NULL;
}
void *task_fun03(void *arg)
{
sem_wait(&sem3);
my_printf((char *)arg);
sem_post(&sem1);
return NULL;
}
int main(int argc, char const *argv[])
{
sem_init(&sem1, 0, 1);
sem_init(&sem2, 0, 0);
sem_init(&sem3, 0, 0);
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, task_fun01, "hello");
pthread_create(&tid2, NULL, task_fun02, "world");
pthread_create(&tid3, NULL, task_fun03, "beijing");
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
sem_destroy(&sem1);
sem_destroy(&sem2);
sem_destroy(&sem3);
return 0;
}

2 无名信号量用于有血缘关系的进程间互斥与同步
使用mmap完成无名信号量的定义
2.1 代码示例
2.1.1 无名信号量用于有血缘关系的进程间互斥
#include <stdio.h>
#include <semaphore.h>
#include <unistd.h>
#include <sys/mman.h>
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
int main(int argc, char const *argv[])
{
sem_t *sem = mmap(NULL, sizeof(sem_t), PROT_READ|PROT_WRITE, MAP_SHARED|MAP_ANONYMOUS, -1, 0);
sem_init(sem, 1, 1);
pid_t pid = fork();
if(pid == 0)
{
sem_wait(sem);
my_printf("hello");
sem_post(sem);
}
else if(pid > 0)
{
sem_wait(sem);
my_printf("world");
sem_post(sem);
}
sem_destroy(sem);
return 0;
}

2.1.2 无名信号量用于有血缘关系的进程间同步
#include <stdio.h>
#include <semaphore.h>
#include <unistd.h>
#include <sys/mman.h>
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
int main(int argc, char const *argv[])
{
sem_t *sem1 = mmap(NULL, sizeof(sem_t), PROT_READ|PROT_WRITE, MAP_SHARED|MAP_ANONYMOUS, -1, 0);
sem_t *sem2 = mmap(NULL, sizeof(sem_t), PROT_READ|PROT_WRITE, MAP_SHARED|MAP_ANONYMOUS, -1, 0);
sem_init(sem1, 1, 1);
sem_init(sem2, 1, 0);
pid_t pid = fork();
if(pid == 0)
{
sem_wait(sem1);
my_printf("hello");
sem_post(sem2);
}
else if(pid > 0)
{
sem_wait(sem2);
my_printf("world");
sem_post(sem1);
}
sem_destroy(sem1);
sem_destroy(sem2);
return 0;
}
3 有名信号量用于无血缘关系的进程间互斥与同步
3.1 有名信号量的API
3.1.1 创建一个有名信号量
创建一个有名信号量
#include <fcntl.h>
#include <sys/stat.h>
#include <semaphore.h>
情况一:信号量存在
sem_t *sem_open(const char *name, int oflag);
情况二:信号量不存在
sem_t *sem_open(const char *name, int oflag, mode_t mode, unsigned int value);
参数:
name:信号量的名字
oflag:sem_open函数的权限标志
mode:文件权限(可读、可写、可执行0777)的设置
value:信号量的初始值
返回值:
成功:信号量的地址
失败:SEM_FALIED
3.1.2 信号量的关闭
关闭信号量
#include <fcntl.h>
#include <sys/stat.h>
#include <semaphore.h>
int sem_close(sem_t *sem);
参数:
信号量的地址
返回值:
成功:0
失败:-1
3.1.3 信号量文件的删除
删除信号量的文件
#include <fcntl.h>
#include <sys/stat.h>
#include <semaphore.h>
int sem_unlink(const char *name);
参数:
信号量的文件名
返回值:
成功:0
失败:-1
3.2 代码示例
3.2.1 有名信号量用于无血缘关系的进程间互斥
进程A
#include <stdio.h>
#include <semapore.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
int main(int argc, char const *argv[])
{
sem_t *sem = sem_open("sem", O_RDWR|O_CREAT, 0666, 1);
sem_wait(sem);
my_printf("hello world");
sem_post(sem);
sem_close(sem);
sem_destroy(sem);
return 0;
}
进程B
#include <stdio.h>
#include <semapore.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
int main(int argc, char const *argv[])
{
sem_t *sem = sem_open("sem", O_RDWR|O_CREAT, 0666, 1);
sem_wait(sem);
my_printf("beijing 2022");
sem_post(sem);
sem_close(sem);
sem_destroy(sem);
return 0;
}

3.2.2 有名信号量用于无血缘关系的进程间同步
进程A
#include <stdio.h>
#include <semapore.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
int main(int argc, char const *argv[])
{
sem_t *sem1 = sem_open("sem1", O_RDWR|O_CREAT, 0666, 1);
sem_t *sem2 = sem_open("sem2", O_RDWR|O_CREAT, 0666, 0);
sem_wait(sem1);
my_printf("hello world");
sem_post(sem2);
sem_close(sem1);
sem_close(sem2);
sem_destroy(sem1);
sem_destroy(sem2);
return 0;
}
进程B
#include <stdio.h>
#include <semapore.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
void my_printf(char *str)
{
int i = 0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
return NULL;
}
int main(int argc, char const *argv[])
{
sem_t *sem1 = sem_open("sem1", O_RDWR|O_CREAT, 0666, 1);
sem_t *sem2 = sem_open("sem2", O_RDWR|O_CREAT, 0666, 0);
sem_wait(sem2);
my_printf("beijing 2022");
sem_post(sem1);
sem_close(sem1);
sem_close(sem2);
sem_destroy(sem1);
sem_destroy(sem2);
return 0;
}

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)