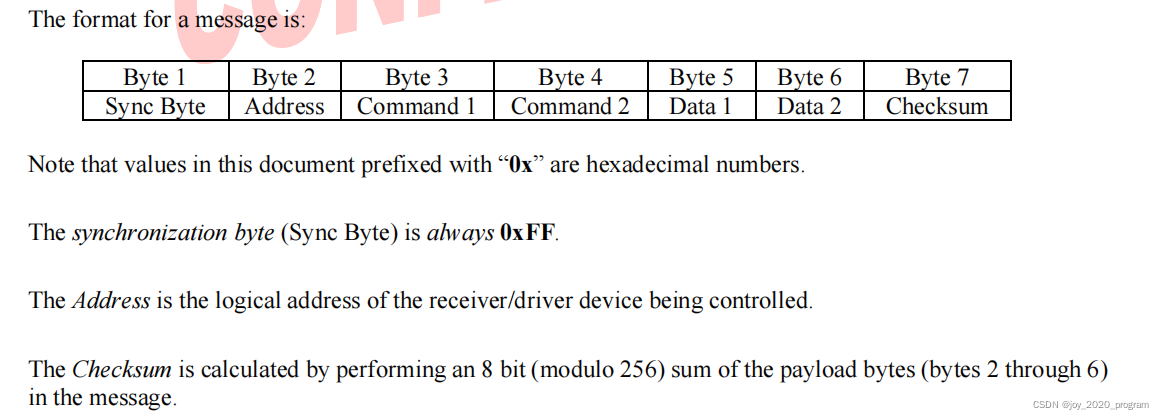
1.Pelco-D协议格式
 2. 通用示例为:
2. 通用示例为:
水平向右控制 FF address 00 02 Hspeed 00 checksum
水平向左控制 FF address 00 04 Hspeed 00 checksum
俯仰向上控制 FF address 00 08 00 Vspeed checksum
俯仰向下控制 FF address 00 10 00 Vspeed checksum
变倍加控制 FF address 00 20 00 00 checksum
变倍减控制 FF address 00 40 00 00 checksum
聚焦远控制 FF address 00 80 00 00 checksum
聚焦近控制 FF address 01 00 00 00 checksum
光圈开控制 FF address 02 00 00 00 checksum
光圈关控制 FF address 04 00 00 00 checksum
。。。。。
3. checksum的计算方法:
 由以上可以推导出完整的协议内容,可以用于软件或者程序使用,用于云台或者云台相机的控制。
由以上可以推导出完整的协议内容,可以用于软件或者程序使用,用于云台或者云台相机的控制。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)