- MAG02模块内置TDK高精度6轴IMU(惯性测量单元)传感器芯片,通过处理器读取传感器数据,并经过内部复杂运算后通过串口输出加速度,角速度,角度等数据,大大减轻了用户开发难度和工作量。同时精心的
PCB 布局和工艺保证了模块收到外接的干扰最小,测量的精度最高。采用先进的数字滤波技术,能有效降低测量噪声,提高测量精度。
模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,姿态测量精度 0.01 度, 稳定性极高。
1应用领域**
MAG02模块适用于机器人、机械臂、智能小车、无人机、扫地机器人、游戏手柄、智能头盔、虚拟直播、空鼠、翻页笔、电动牙刷、美容仪、惯性导航、智能乐器及角度检测等领域。
2 性能参数
1)电压: 3.3±0.2V
2)电流: < 3.5mA
3)体积: 21.2mm X 15.0mm X 1.0mm
4)焊盘孔间距:2.54mm
5)测量维度:加速度: 3 维,角速度: 3 维,姿态角:3 维
6)量程:加速度:± 16g,角速度:± 2000°/s
7)分辨率: 加速度:6.1x10-5g,角速度:7.6x10-3 °/s
8)稳定性: 加速度:0.01g,角速度 0.05°/s
9)姿态测量稳定度:0.01°
10)数据输出频率 100Hz/20Hz
11)数据接口:串口(TTL 电平) 波特率 115200bps/9600bps

3硬件连接方法
可以通过USB转TTL串口工具连接PC与模块,进行测试,数据分析等;模块也可以通过串口直接连接其他带MCU的系统,做为系统的一部分完成运动数据采集工作。
4 上位机
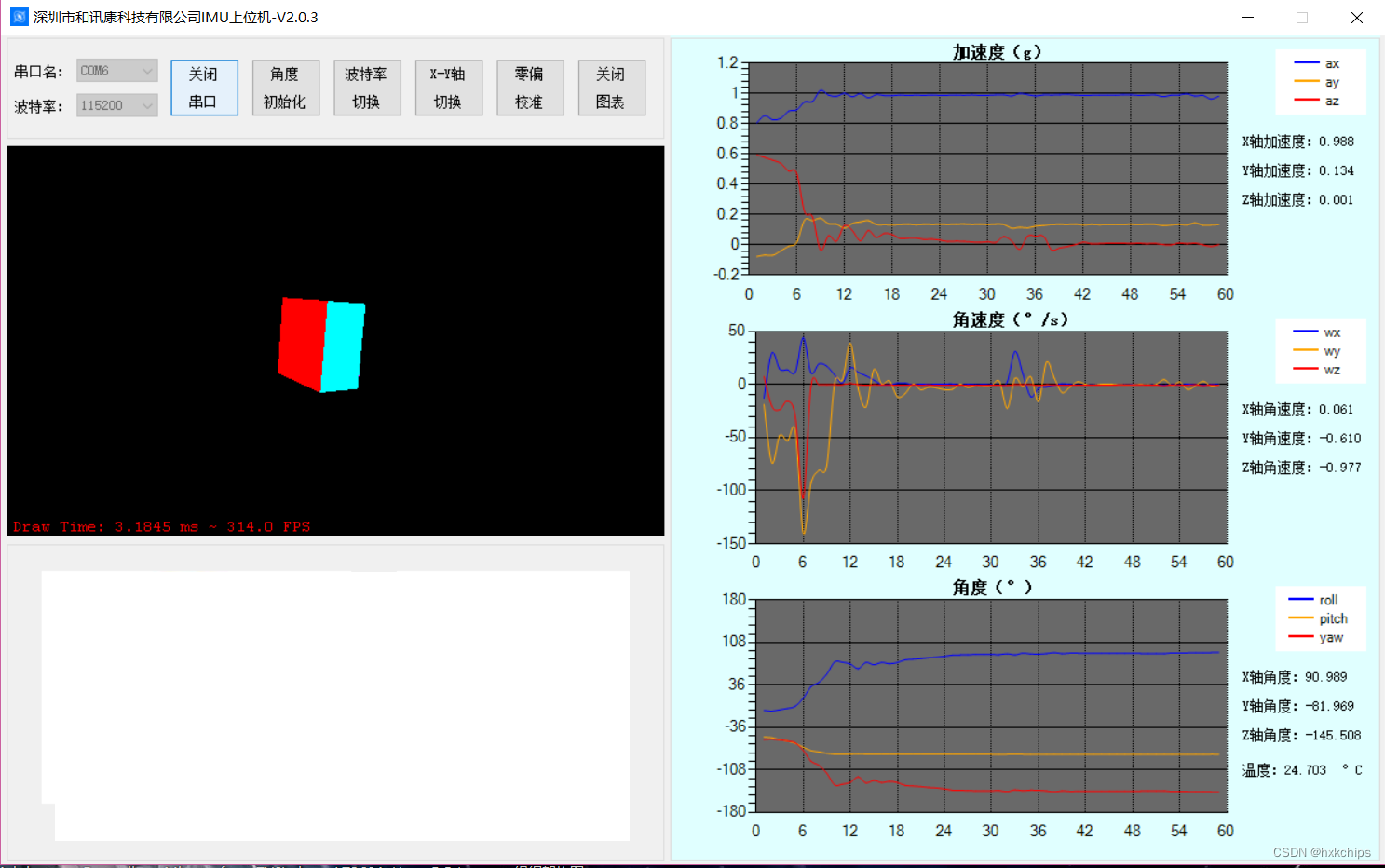
与模块配套的上位机可以进行实时数据图形显示,3D模型运动轨迹显示等功能,辅助用户进行数据分析和程序调试,快速便捷的完成与模块的对接。界面如下:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)