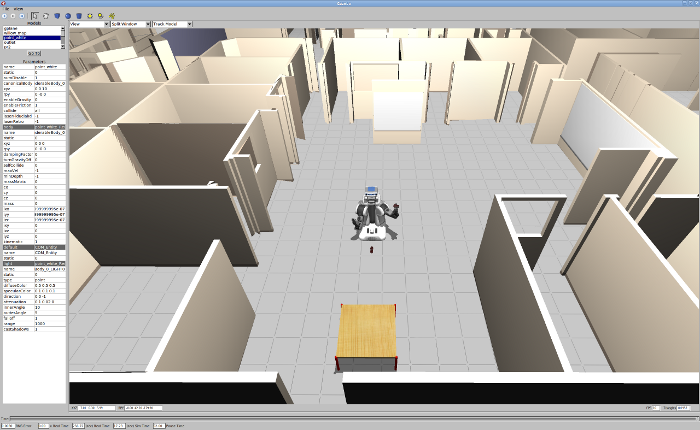
Gazebo is a 3D multi-robot simulator with dynamics. It is capable of simulating articulated robot in complex and realistic environments.
Gazebo是一个三维多机器人动力学仿真。它能够模拟复杂和现实的环境中关节型机器人。


本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)