背景
初学ROS,首先要面临的第一个问题就是环境搭建问题,面对众多的Ubuntu版本和ROS版本,且二者还存在兼容性问题,如何搭建一个灵活性高,易于切换的学习环境显得有为重要。通常有如下几种做法:
- 在PC上安装配套的Ubuntu系统和ROS环境
- 在PC上安装Window系统,通过虚拟机方式安装配套Ubuntu系统和ROS环境
- 在PC上安装较新的Ubuntu系统,然后通过docker方式,下载运行各种Docker镜像
本文选用的是上述第三种,下面记录详细操作步骤。
安装可视化容器管理工具Portainer
$ sudo docker pull portainer/portainer
$ sudo docker run -d -p 9000:9000 -v /var/run/docker.sock:/var/run/docker.sock --restart=always --name prtainer portainer/portainer
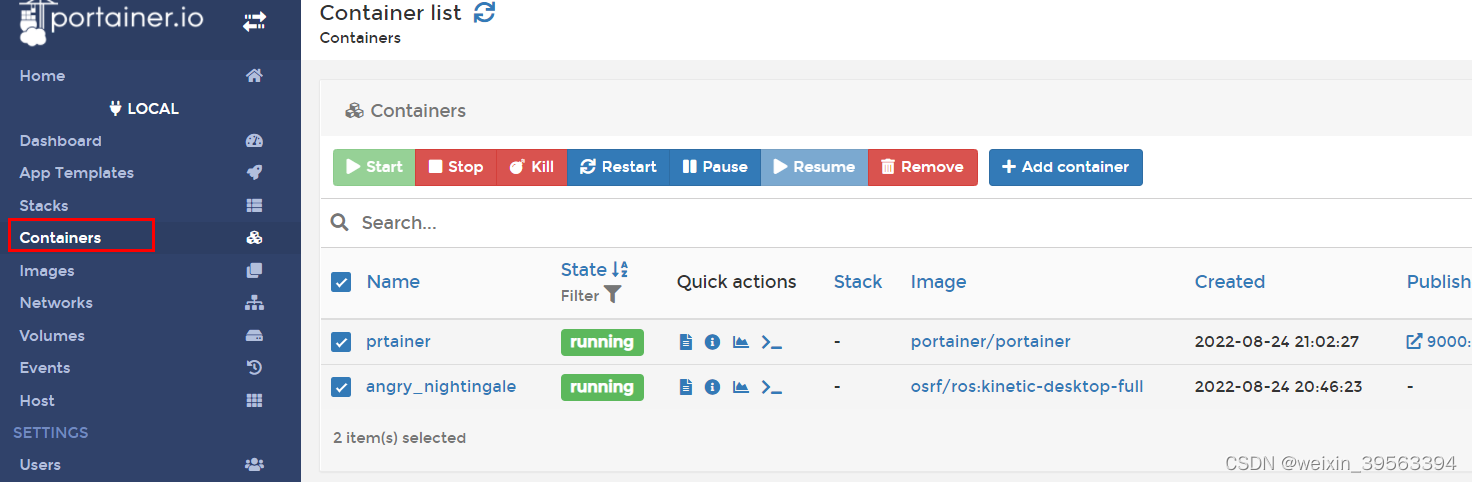
打开IE浏览器,输入ip:9000端口,新建账户和密码后,即可进入如下docker管理界面,有了该工具,可以省去我们再次学习docker相关的控制台命令,在可视化界面查看已安装的docker容器和运行中的docker镜像。
安装Dokcer软件
$ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
$ sudo apt-get install docker-ce docker-ce-cli containerd.io
安装ROS镜像
ROS的版本众多,有ROS1和ROS2两个大版本,ROS1又分为:
| Distro | Release Date | EOL Date |
|---|
| ROS Melodic Morenia | May 23rd, 2018 | May, 2023 |
| ROS Lunar Loggerhead | May 23rd, 2017 | May, 2019 |
| ROS Kinetic Kame | May 23rd, 2016 | April, 2021 |
| ROS Jade Turtle | May 23rd, 2015 | May, 2017 |
| ROS Indigo Igloo | July 22nd, 2014 | April, 2019 |
| … | … | … |
《ROS机器人高效编程》一书中,使用的ROS版本是Kinetic,于是在Ubuntu系统上运行该版本Dokcer镜像:
$ docker run -it osrf/ros:kinetic-desktop-full bash
$ lsb_release -a
No LSB modules are available.
Distributor ID: Ubuntu
Description: Ubuntu 16.04.7 LTS
Release: 16.04
Codename: xenial
$ env
...
CMAKE_PREFIX_PATH=/opt/ros/kinetic
ROS_ETC_DIR=/opt/ros/kinetic/etc/ros
_=/usr/bin/env
进入Dokcer镜像的ROS图形化界面
https://blog.csdn.net/zhang14916/article/details/107593330
参考链接:
https://blog.csdn.net/m0_54853420/article/details/124464889
https://blog.csdn.net/qq_40695642/article/details/117607446
https://blog.csdn.net/hyj53/article/details/118633272
https://blog.csdn.net/zhqh100/article/details/97375650
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)