效果:
安装步骤:
# ROS Kinetic:
$ sudo apt-get install ros-kinetic-find-object-2d
$ cd ~/catkin_ws
$ git clone https://github.com/introlab/find-object.git src/find_object_2d
$ catkin_make
启动:
$ roslaunch usb_cam usb_cam-test.launch
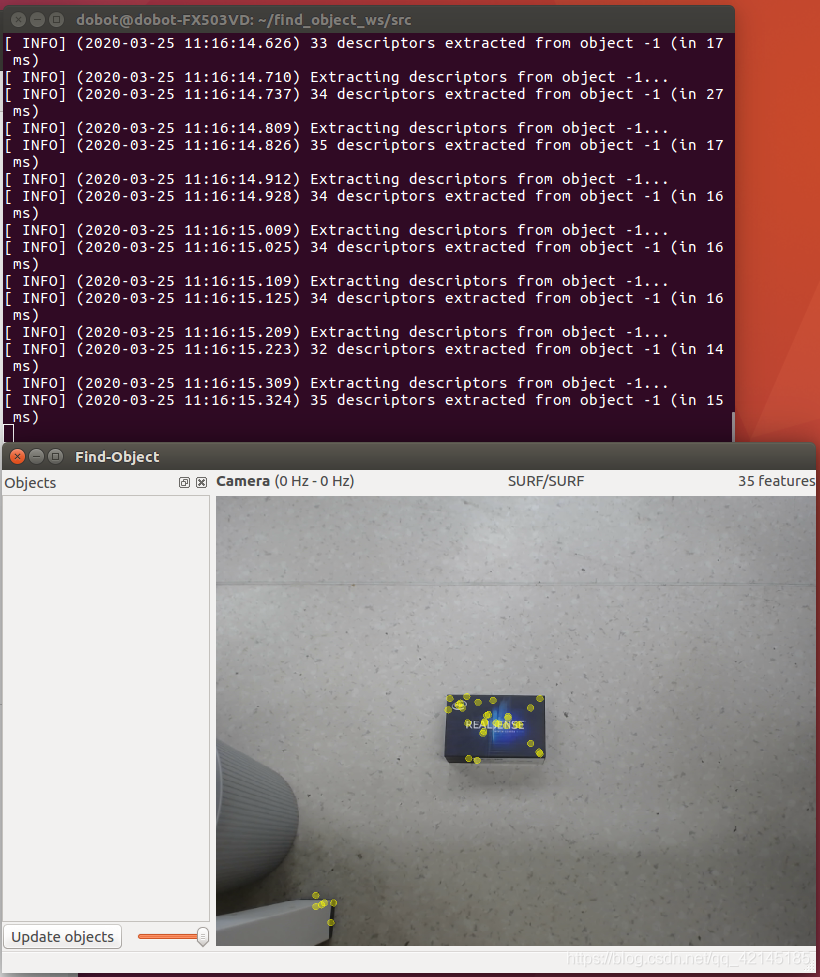
$ rosrun find_object_2d find_object_2d image:=/usb_cam/image_raw
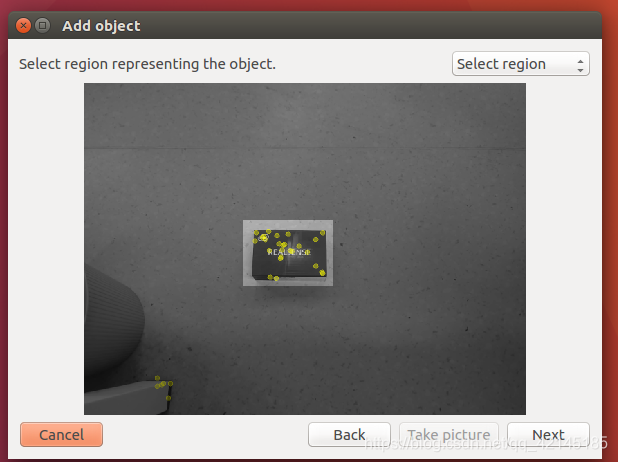
打开物体检测窗口后在窗口左边白色区域右键单击,然后选择Add objects from scene选项会弹出Add object对话框,如图:
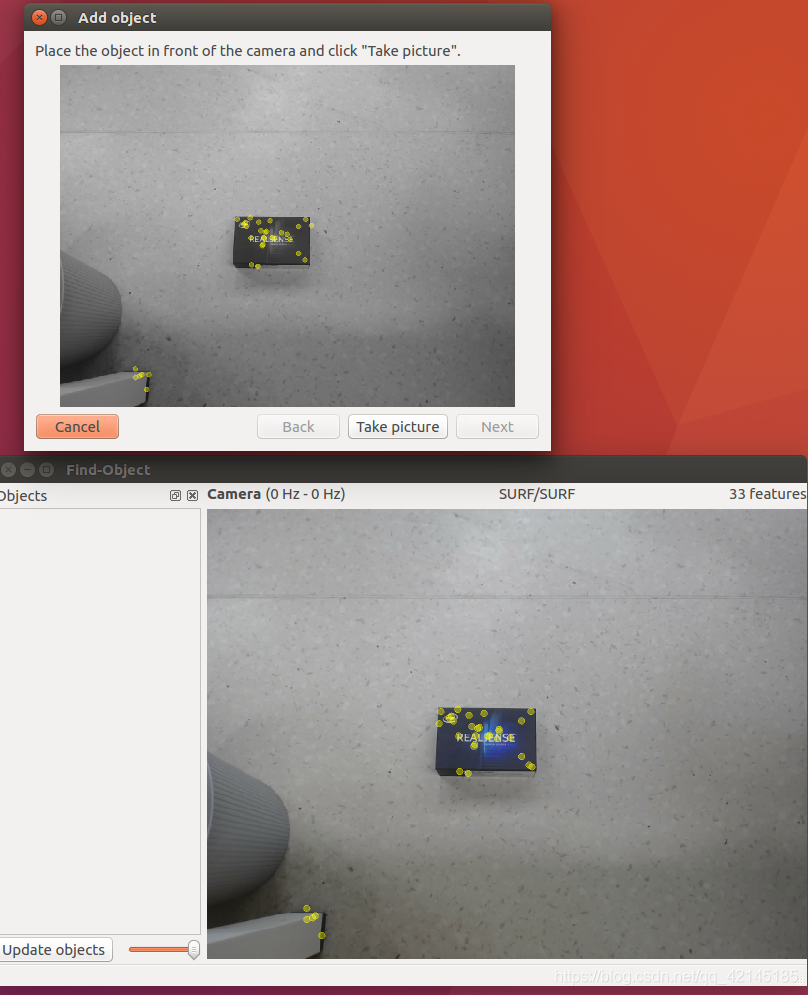
把你需要检测的物品放入摄像头下,点击Take Picture 按钮对物体进行快照,如图:
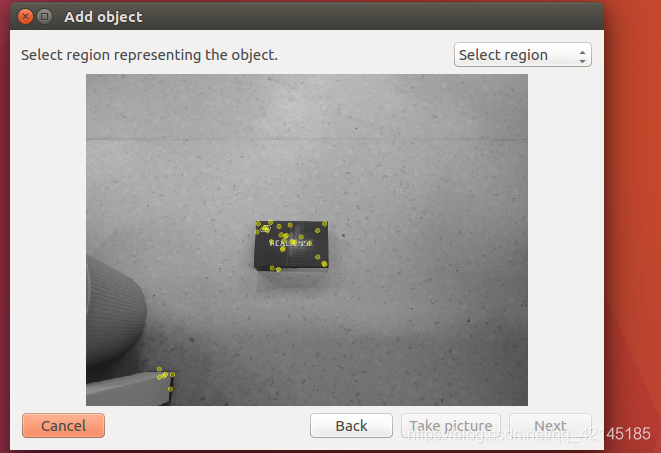
用鼠标来标记物体如图:标记完成之后点击Next
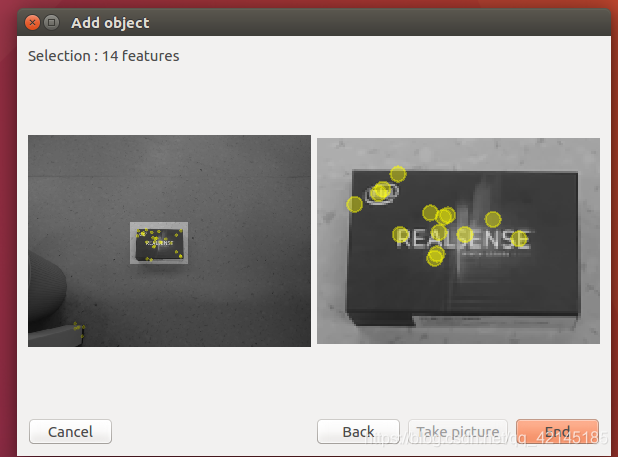
裁剪完成点击End
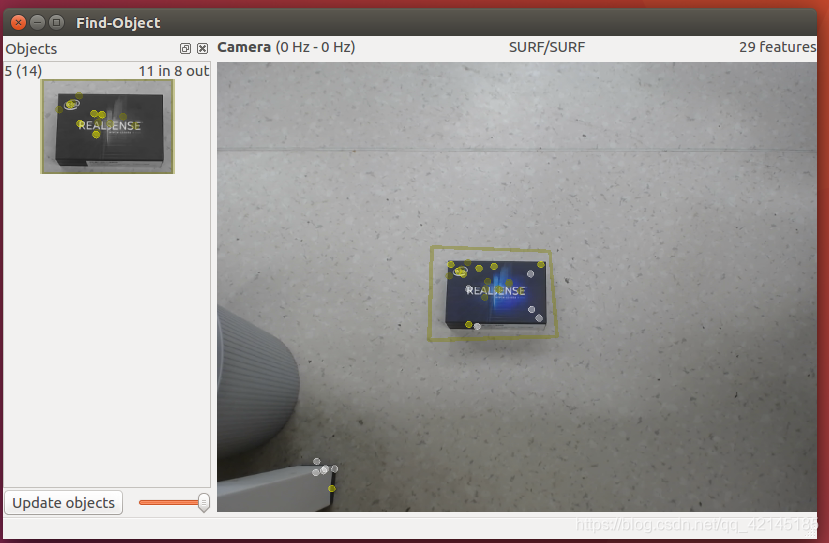
查看识别效果:

查看物体位置:
$ rosrun find_object_2d print_objects_detected
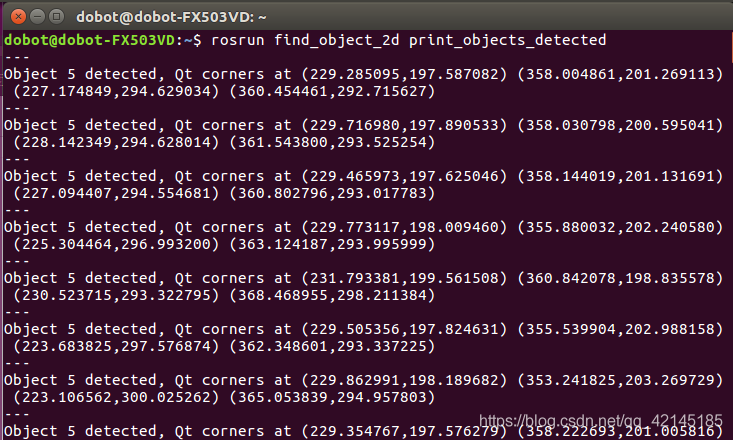
这里的四个点位是物体框的4个角点的点位。
完成之后,右键点击特征图片可以保存,下次使用时直接添加即可使用,就不要再继续查找特征了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)