PX4激光雷达避障仿真
废话不多说,直接上教程。
一、环境搭建
需要如下环境:
ROS
gazebo
PX4源码 v1.9.2及以上
PX4_command
若进行激光雷达的仿真,先要把px4的软件仿真gazebo环境搭建好,
先确保gazebo仿真没问题
make px4_sitl_default gazebo
然后确保运行px4源码中launch文件夹下posix_sitl.launch没问题
roslaunch posix_sitl.launch
这里根据ROS的版本分两种情况:
如果你是这个版本,那么恭喜你,只需要一个地方的改动。
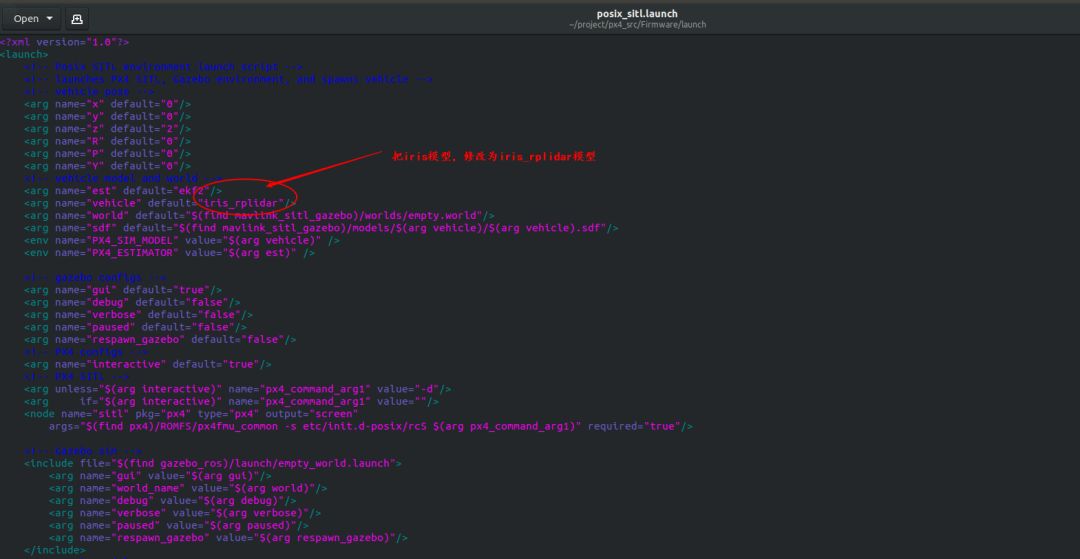
打开posix_sitl.launch, 把iris模型,修改为iris_rplidar模型
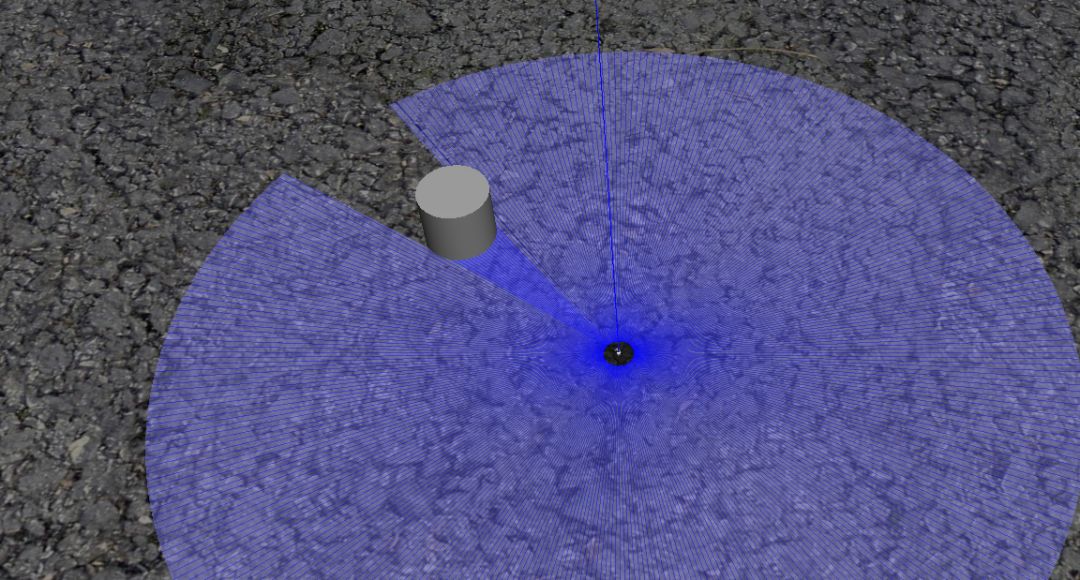
gazebo 将会加载激光雷达的仿真
效果如下
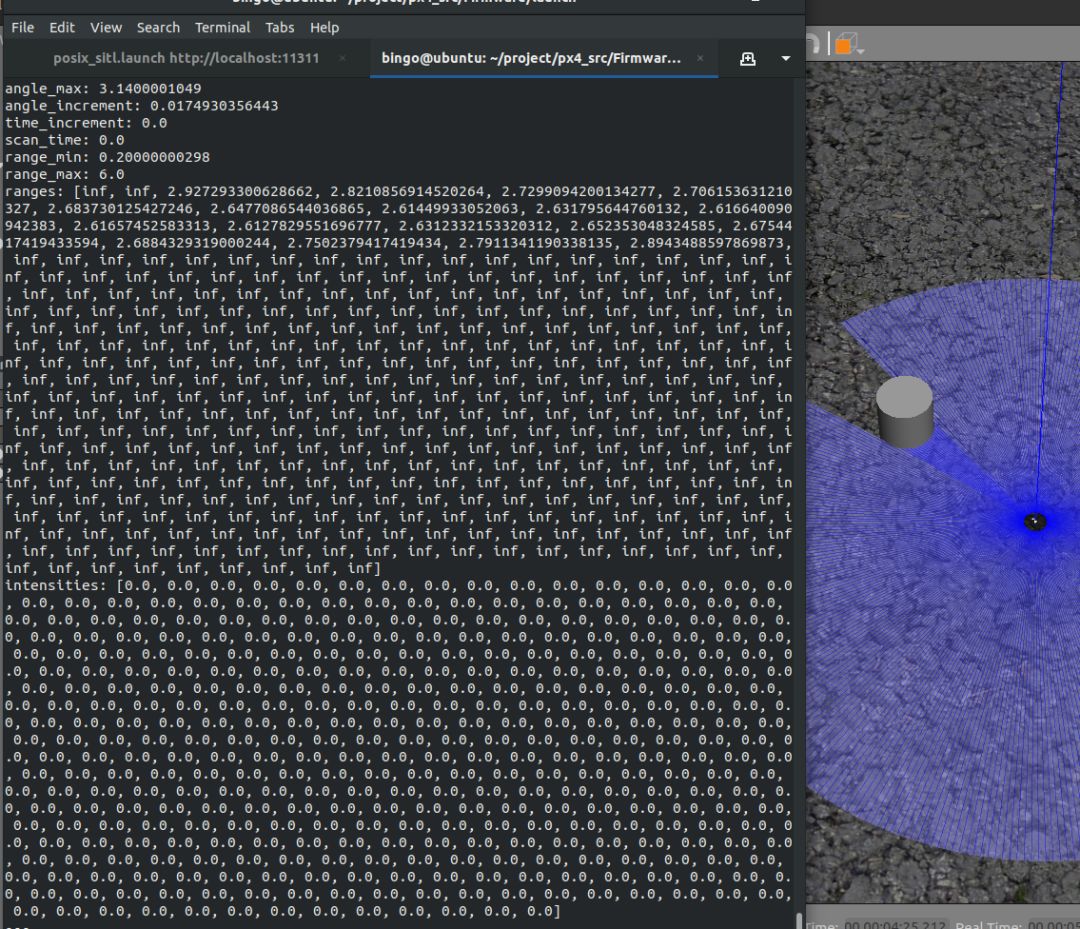
重新打开一个终端,查看雷达的点云数据
rostopic echo /laser/scan
1: 打开posix_sitl.launch, 把iris模型,修改为iris_rplidar模型
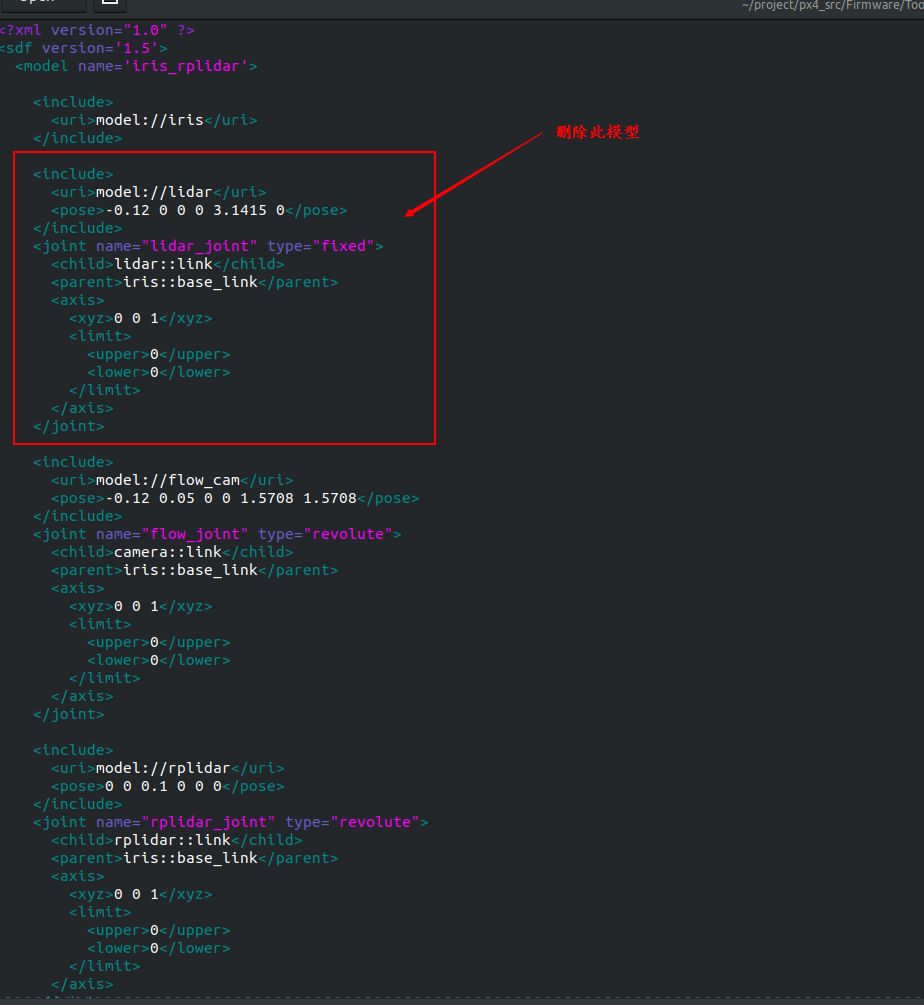
2:进入如下目录,修改iris_rplidar文件夹下的iris_rplidar.sdf模型文件
~/yourProject/Firmware/Tools/sitl_gazebo/models/iris_rplidar
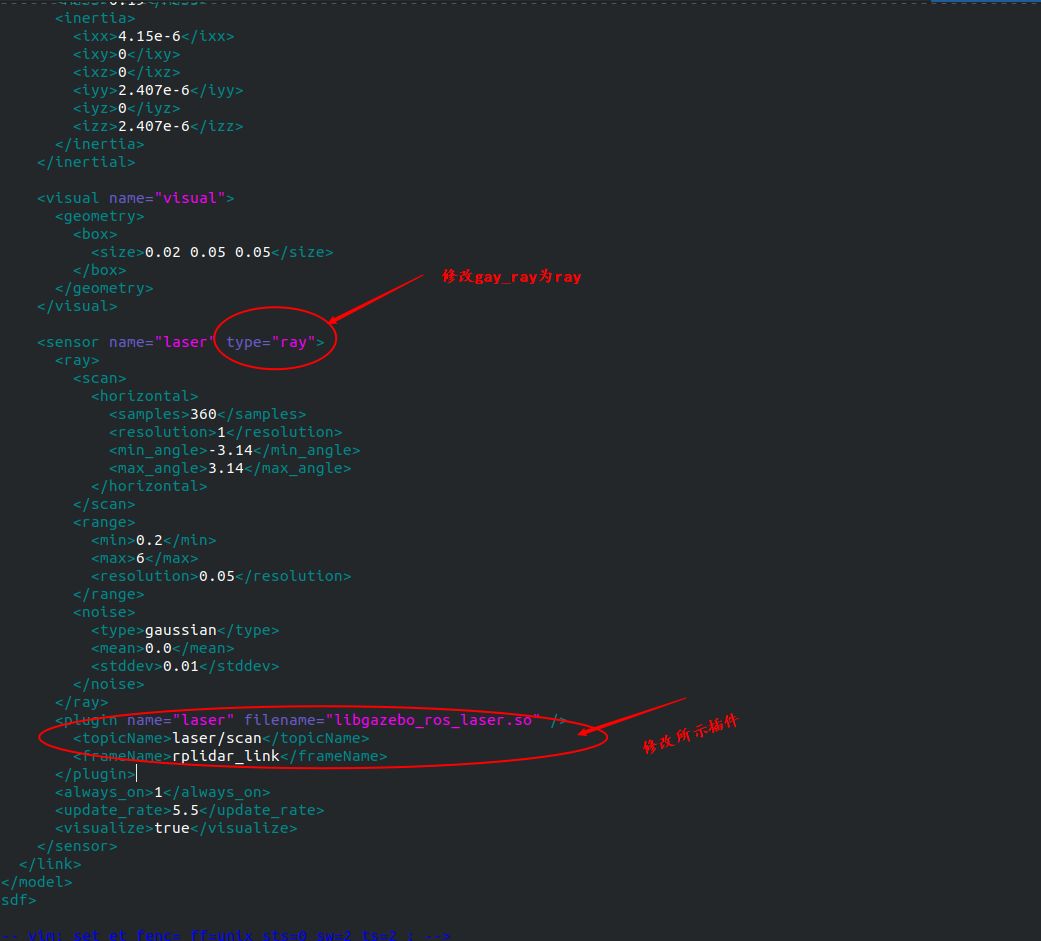
3:进入如下目录,修改rplidar文件夹下的model.sdf模型文件
~/yourProject/Firmware/Tools/sitl_gazebo/models/rplidar
搞定,返回运行
roslaunch posix_sitl.launch
gazebo仿真中就会有激光雷达了。
二、避障实现
下载PX4_command
搭建好px4_command仿真环境教程传送门
运行如下的的脚本
amov@amov:~/AMOV_WorkSpace/px4_ws/src/px4_command/sh/sh_for_simulation$ ./sitl_gazebo_laserCollAvo.sh
这里我们提供不那么智能的避障策略,如果你有
实现了更好避障算法,非常欢迎你来这里
分享到论坛:http://bbs.amovauto.com
国庆节论坛有任务活动,欢迎大家来参加。
测试视频:
