I.说明
作者:WXP(翱翔云端的鸟)
联系方式:328452854@qq.com || 13100610853(联系请注明CSDN)
申明:个人原创,转载请先经过本人同意!
要说的话:个人水平有限,写之前也看过许多大神的博客,不足之处,还请指正!有疑问欢迎大家联系我交流探讨!
II.环境
软件环境:KEIL-MDK v-5.24a
硬件:STM32F103ZET6最小系统板
III.uCOS-II
1.uCOS简介
uCOS(也有人叫uC/OS)由美国人 Jean Labrosse在1992年编写的一个实时操作系统
1998年更新到uCOS-II,并于2000年得到美国航天管理局(FAA)认证,可以用于飞行器中.
官方网站:www.micrium.com
2.uCOS-II的特点
(1)可裁剪
uCOS-II源代码中有一个专门用来裁剪系统的配置文件,通过各种宏的来打开或者
关闭那些不需要用到系统服务,这样可以大大减小平台移植uCOS-II所需要的存储空间
(2) 便于移植
uCOS-II基本全部是用C语言写的,只有和微处理器相关的那部分是用汇编写的,汇编
所占比例极小,从而使得uCOS-II便于移植到各种微处理器上.事实上uCOS-II已经运用
在了大部分的8位、16位、32位的MCU中了
(3) 抢占式
uCOS-II是支持抢占式,系统总是运行多个任务中优先级别最高的那个就绪任务,高
优先级会就绪任务会抢占正在运行的任务,实时性得以保证
(4) 多任务
uCOS-II同时支持255个任务,实际上不会用到这么多,看具体应用来决定
(5) 稳定可靠
uCOS-II已经被使用在很多的产品上,经过市场产品的实际检测,具有很好的稳定
性和可靠性
3.uCOS-II的内核对象
⊙ 信号量
⊙ 互斥信号量
⊙ 事件标志
⊙ 消息邮箱
⊙ 消息队列
⊙ 内存管理
⊙ 时钟管理
⊙ 任务管理
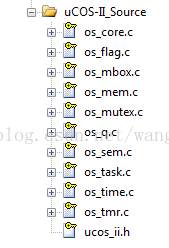
4.uCOS-II的文件结构
⊙ 与处理器无关的代码
os_core.c
os_flag.c
os_mbox.c
os_mem.c
os_mutex.c
os_q.c
os_sem.c
os_task.c
os_time.c
os_tmr.c
ucos_ii.h
⊙ 与处理相关的代码(移植时需要修改)
os_cpu_c.c
os_cpu_a.asm
os_cpu.h
⊙ 与应用程序相关的代码
os_cfg.h
includes.h
IV.移植uCOS-II到STM32F103
1. uCOS-II移植准备工作
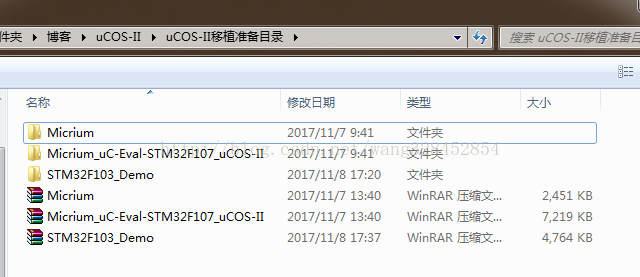
准备好uCOS-II源码、uCOS-II官方移植到STM32F107的Demo、STM32F103裸机Demo
下载地址:
CSDN:http://download.csdn.net/download/wang328452854/10110946
百度云盘: http://pan.baidu.com/s/1eRHYeJo 密码:d1pj
当然也可以从官网或者论坛下载,然后用你自己的裸机历程也是可以的.
2. uCOS-II移植
(1) 若是按照我的代码,解压后如下图所示
(2) 在裸机代码STM32F103_Demo中添加一个目录uCOS-II
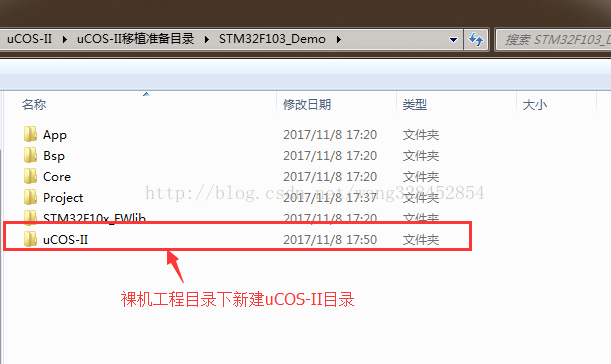
(3)uCOS-II,并在uCOS-II目录下新建两个目录Ports和Source

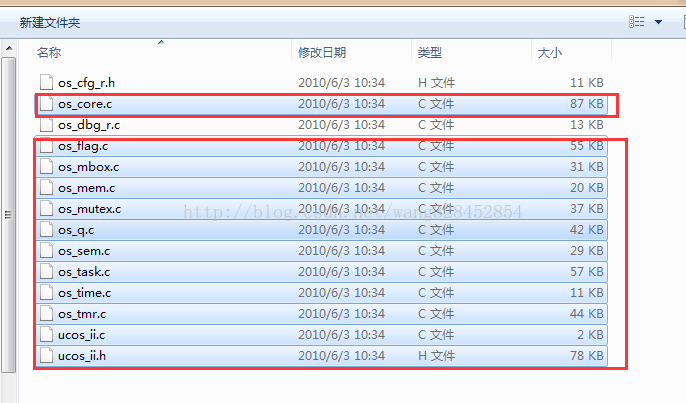
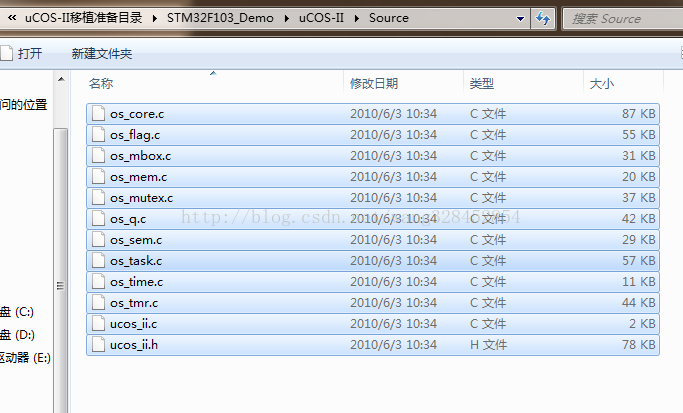
(4) 将准备目录下的Micrium\uCOS-II\Source下除os_cfg_c.h和os_dbg_r.c全部复制到移植工程目录下的Source下
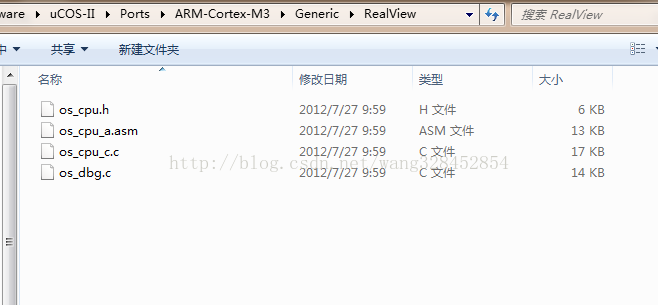
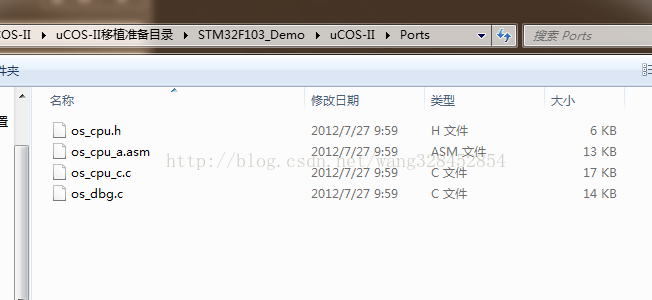
(5) 将准备目录下Micrium_uC-Eval-STM32F107_uCOS-II\Software\uCOS-II\Ports\ARM-Cortex-M3\Generic\RealViem下的全部文件拷贝到移植目录的Ports下
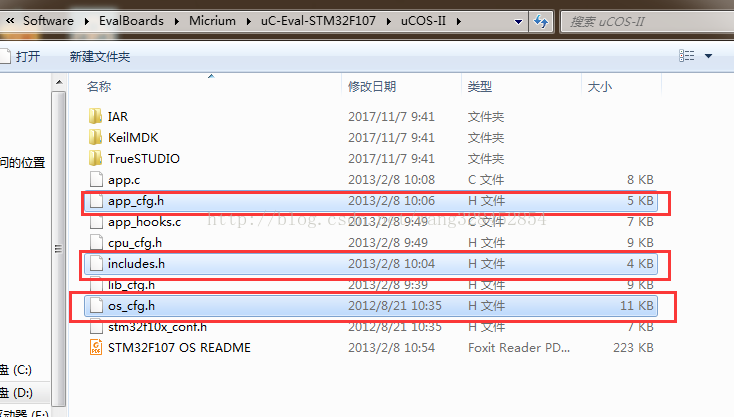
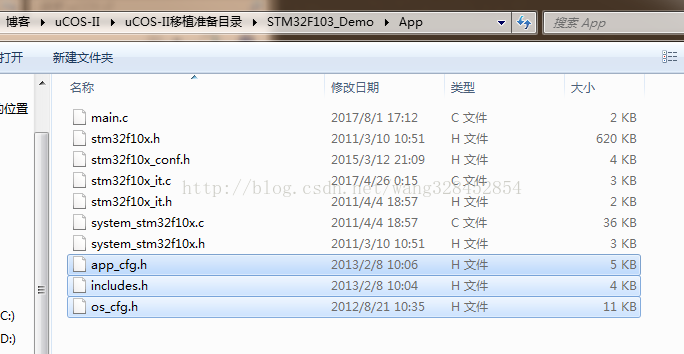
(6) Micrium_uC-Eval-STM32F107_uCOS-II\Software\EvalBoards\Micrium\uC-Eval-STM32F107\uCOS-下的三个文件拷贝到移植工程的App目录下
(7) 用MDK打开移植工程,新建Group uCOS-II_Source uCOS-II_Ports并添加对应文件如下
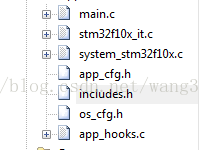
上图中比之前多了app_hooks.c,主要是一些钩子函数,若是需要从第6步中拷贝到App下添加即可
(8) 修改includes.h 如下
/*
*********************************************************************************************************
* EXAMPLE CODE
*
* (c) Copyright 2003-2013; Micrium, Inc.; Weston, FL
*
* All rights reserved. Protected by international copyright laws.
* Knowledge of the source code may NOT be used to develop a similar product.
* Please help us continue to provide the Embedded community with the finest
* software available. Your honesty is greatly appreciated.
*********************************************************************************************************
*/
/*
*********************************************************************************************************
*
* MASTER INCLUDES
*
* ST Microelectronics STM32
* on the
*
* Micrium uC-Eval-STM32F107
* Evaluation Board
*
* Filename : includes.h
* Version : V1.00
* Programmer(s) : EHS
*********************************************************************************************************
*/
#ifndef INCLUDES_PRESENT
#define INCLUDES_PRESENT
/*
*********************************************************************************************************
* STANDARD LIBRARIES
*********************************************************************************************************
*/
#include <stdarg.h>
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
/*
*********************************************************************************************************
* LIBRARIES
*********************************************************************************************************
*/
//#include <cpu.h>
//#include <lib_def.h>
//#include <lib_ascii.h>
//#include <lib_math.h>
//#include <lib_mem.h>
//#include <lib_str.h>
/*
*********************************************************************************************************
* APP / BSP
*********************************************************************************************************
*/
#include "bsp.h"
/*
*********************************************************************************************************
* OS
*********************************************************************************************************
*/
#include <ucos_ii.h>
/*
*********************************************************************************************************
* ST
*********************************************************************************************************
*/
/*
*********************************************************************************************************
* INCLUDES END
*********************************************************************************************************
*/
#endif
(9)修改main.c如下
/******************************************************************************
* File : main.c
* Function : 主文件
* Description: None
* Version : V1.00
* Author : WXP
* Date :
* History :
******************************************************************************/
#include "includes.h"
//START 任务
//设置任务优先级
#define START_TASK_PRIO 10 //开始任务的优先级设置为最低
//设置任务堆栈大小
#define START_STK_SIZE 64
//任务堆栈
OS_STK START_TASK_STK[START_STK_SIZE];
//任务函数
void start_task(void *pdata);
//LED0任务
//设置任务优先级
#define LED0_TASK_PRIO 7
//设置任务堆栈大小
#define LED0_STK_SIZE 64
//任务堆栈
OS_STK LED0_TASK_STK[LED0_STK_SIZE];
//任务函数
void led0_task(void *pdata);
//LED1任务
//设置任务优先级
#define LED1_TASK_PRIO 6
//设置任务堆栈大小
#define LED1_STK_SIZE 64
//任务堆栈
OS_STK LED1_TASK_STK[LED1_STK_SIZE];
//任务函数
void led1_task(void *pdata);
int main(void)
{
Bsp_Init();
OSInit();
OSTaskCreate(start_task,(void *)0,(OS_STK *)&START_TASK_STK[START_STK_SIZE-1],START_TASK_PRIO );//创建起始任务
OSStart();
while(1)
{
}
}
//开始任务
void start_task(void *pdata)
{
OS_CPU_SR cpu_sr=0;
pdata = pdata;
OS_ENTER_CRITICAL(); //进入临界区(无法被中断打断)
OSTaskCreate(led0_task,(void *)0,(OS_STK*)&LED0_TASK_STK[LED0_STK_SIZE-1],LED0_TASK_PRIO);
OSTaskCreate(led1_task,(void *)0,(OS_STK*)&LED1_TASK_STK[LED1_STK_SIZE-1],LED1_TASK_PRIO);
OSTaskSuspend(START_TASK_PRIO); //挂起起始任务.
OS_EXIT_CRITICAL(); //退出临界区(可以被中断打断)
}
//LED0任务
void led0_task(void *pdata)
{
while(1)
{
LED2(ON);
OSTimeDlyHMSM(0,0,0,200);
LED2(OFF);
OSTimeDlyHMSM(0,0,0,200);
}
}
//LED1任务
void led1_task(void *pdata)
{
while(1)
{
LED3(ON);
OSTimeDlyHMSM(0,0,0,500);
LED3(OFF);
OSTimeDlyHMSM(0,0,0,500);
}
}
(10) 修改uCOS-II_Ports下的os_cpu_a.asm

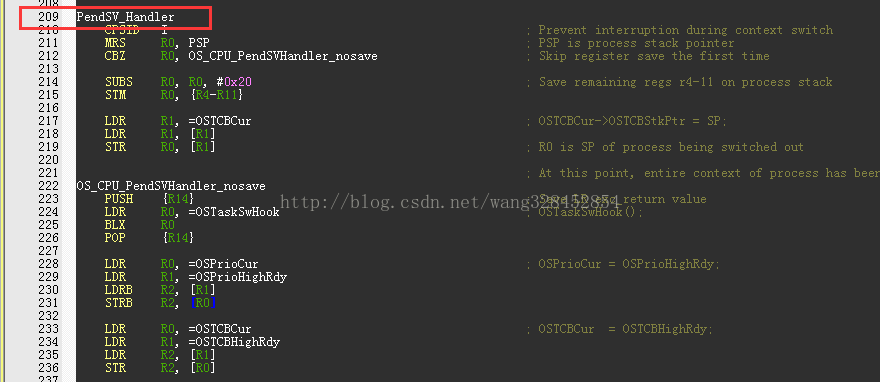
(11) 编译会出现一个错误,重定义了PendSV_Handler

这个时候只需要把stm32f10x_it.c中的PendSV_Handler注释掉即可
此时编译不会报错但是并未修改完成
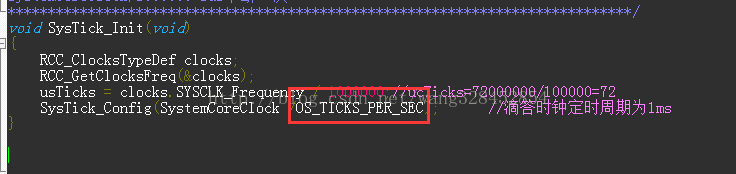
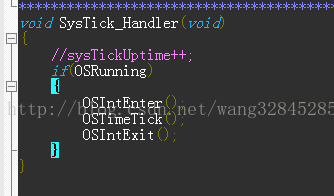
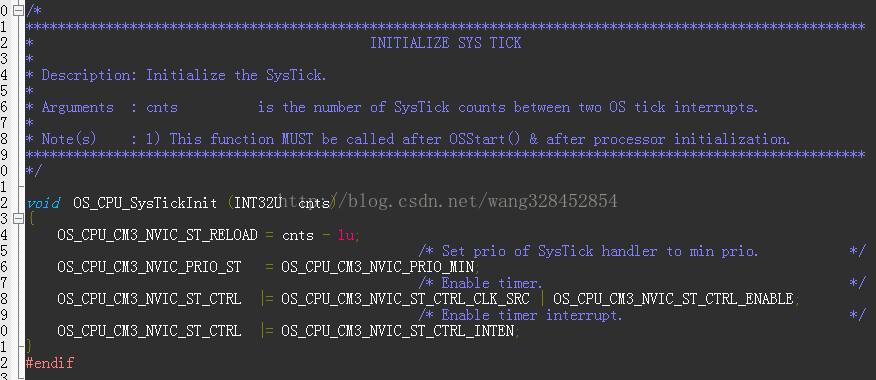
(12) 修改bsp_systick.c

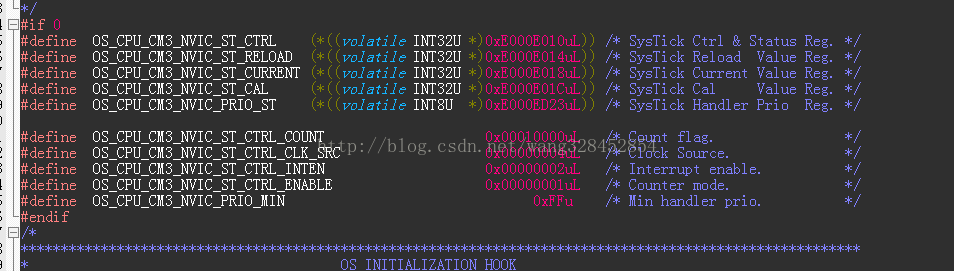
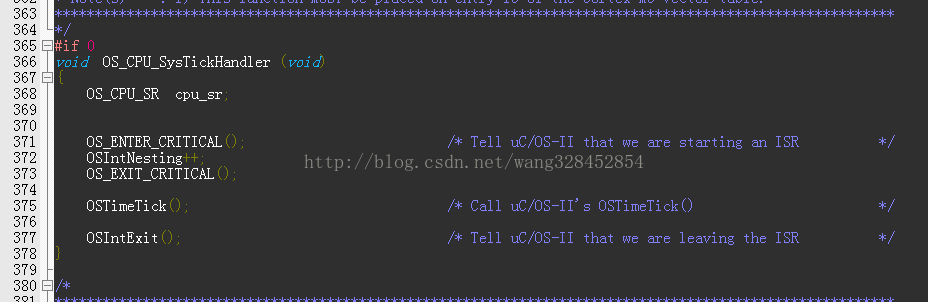
(13) 修改os_cpu_c.c中的关于systick的配置初始化及中断处理部分
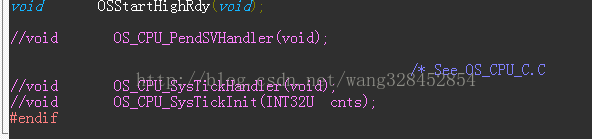
(14) 注释掉os_cpu.h中我们刚才修改过的函数部分
至此移植步骤完成了,main.c中两个LED任务,下载到开发板中可以看到两个灯以不同频率闪烁
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)