实例分析Valeo SCALA I, SICK LMS291, Velodyne HDL-64E, Livox(DJI) MID-70几款激光雷达,机械激光雷达特点是通过电动执行器带动镜面,透镜或者机体旋转进行扫描。
Valeo SCALA I
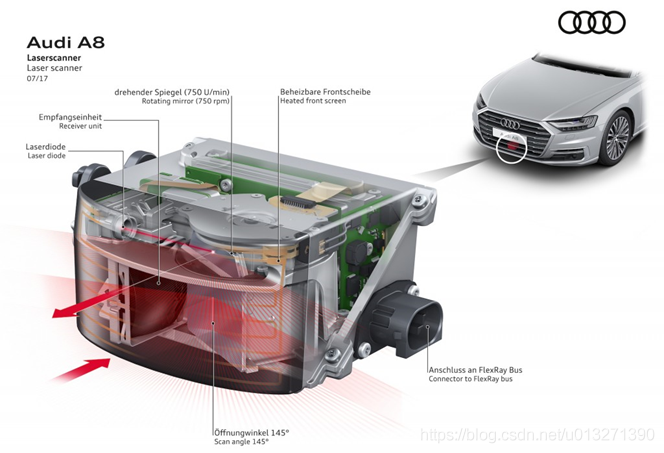
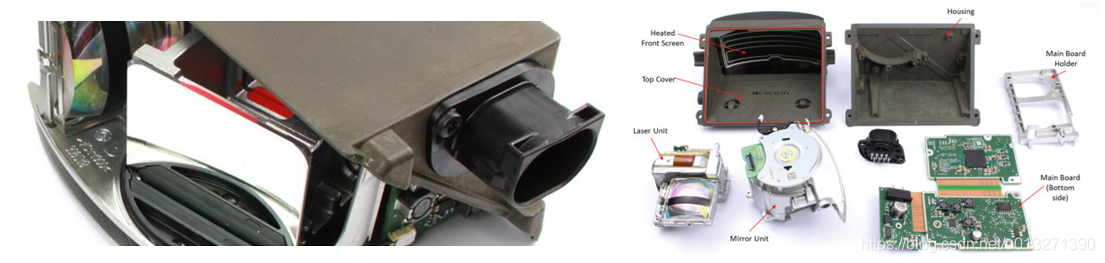
利用多边体镜面反射光束,并由电机带动高速旋转。当几个镜面角度不一样时,可以发射出几道光幕。工作原理:

SICK LMS291

一个比较古老的型号,但是工作原理比较典型,SICK的其他系列和型号也在应用。
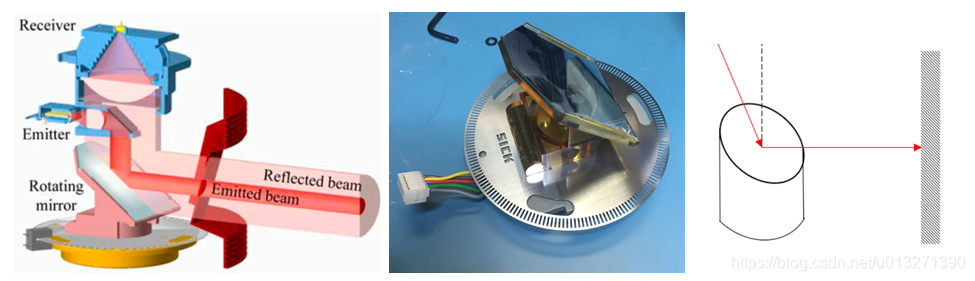 电机带动与发射激光的方向有一定角度的一个镜面旋转,通过镜面反射光线。一个电机只能控制镜面发射出一个平面上的光线,即一道光幕。
电机带动与发射激光的方向有一定角度的一个镜面旋转,通过镜面反射光线。一个电机只能控制镜面发射出一个平面上的光线,即一道光幕。
Velodyne HDL-64E
 Velodyne的64线激光雷达,电机带动整个机体旋转。
Velodyne的64线激光雷达,电机带动整个机体旋转。
Livox MID-70

采用的是Risley prism的光学scanner设计
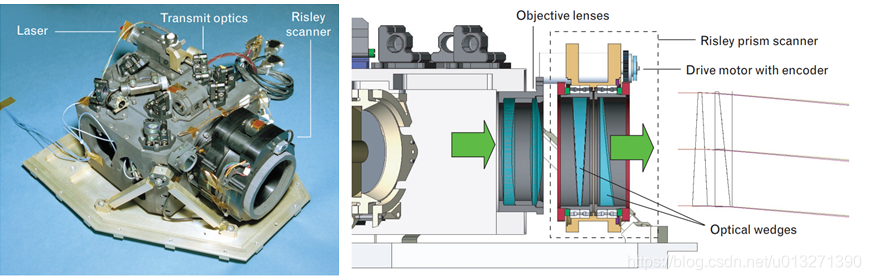 通过旋转前面两个厚度不均匀的透镜,发射出的激光是这样的:
通过旋转前面两个厚度不均匀的透镜,发射出的激光是这样的:

以上即是几种机械激光雷达的实现方式
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)