进程:进程(Process)是计算机中的程序关于某数据集合上的一次运行活动,是系统进行资源分配和调度的基本单位。
进程状态:一个进程的生命周期可以划分为一组状态,这些状态刻画了整个进程。进程状态即体现一个进程的生命状态。
进程状态:
一般来说,进程有三个状态,即就绪状态,运行状态,阻塞状态。
运行态:进程占用CPU,并在CPU上运行;
就绪态:进程已经具备运行条件,但是CPU还没有分配过来;
阻塞态:进程因等待某件事发生而暂时不能运行;
下面是3种状态转换图
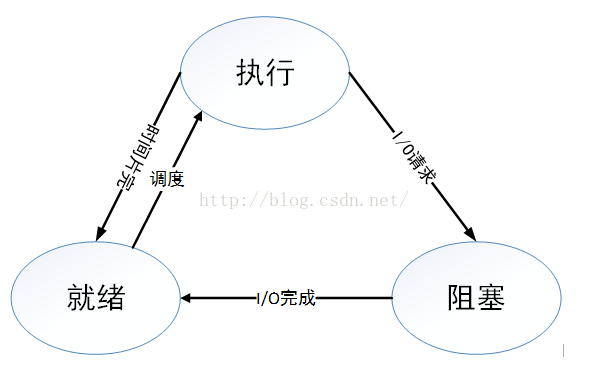
当然理论上上述三种状态之间转换分为六种情况;
运行——>就绪:1,主要是进程占用CPU的时间过长,而系统分配给该进程占用CPU的时间是有限的;2,在采用抢先式优先级调度算法的系统中,当有更高优先级的进程要运行时,该进程就被迫让出CPU,该进程便由执行状态转变为就绪状态。
就绪——>运行:运行的进程的时间片用完,调度就转到就绪队列中选择合适的进程分配CPU
运行——>阻塞:正在执行的进程因发生某等待事件而无法执行,则进程由执行状态变为阻塞状态,如发生了I/O请求
阻塞——>就绪:进程所等待的事件已经发生,就进入就绪队列
以下两种状态是不可能发生的:
阻塞——>运行:即使给阻塞进程分配CPU,也无法执行,操作系统在进行调度时不会从阻塞队列进行挑选,而是从就绪队列中选取
就绪——>阻塞:就绪态根本就没有执行,谈不上进入阻塞态。
在一些系统中,又增加了一些新状态,如挂起状态,可运行状态,深度睡眠状态,浅度睡眠状态,暂停状态,僵死状态。
可运行状态:运行状态和就绪状态的合并,表示进程正在运行或准备运行,Linux 中使用TASK_RUNNING 宏表示可运行状态。
浅度睡眠状态:进程正在睡眠(被阻塞),等待资源的到来是唤醒,也可以通过其他进程信号或时钟中断唤醒,进入运行队列。Linux 中使用TASK_INTERRUPTIBLE 宏表示此状态。
深度睡眠状态:其和浅度睡眠基本类似,但不可被其他进程信号或时钟中断唤醒。Linux 中使用TASK_UNINTERRUPTIBLE 宏表示此状态。
暂停状态:进程暂停执行接受某种处理。Linux 使用TASK_STOPPED 宏表示此状态。
僵死状态:进程已经结束但未释放进程控制块(PCB),Linux 使用TASK_ZOMBIE 宏表示此状态。
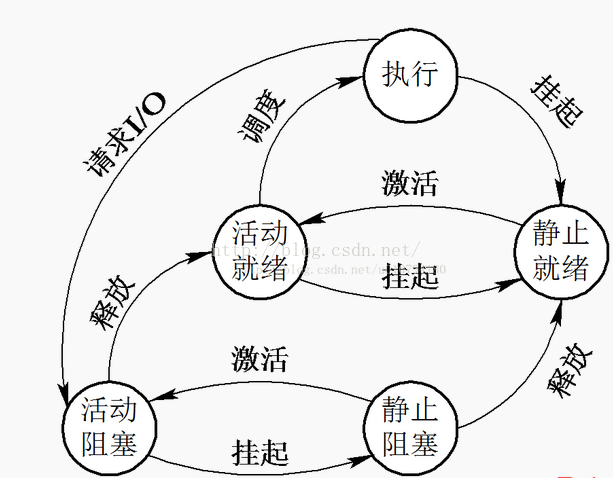
挂起状态:在执行状态的进程通过挂起即可进入就绪状态,如图所示,就绪状态和阻塞状态都分为活动态和静止态。由活动态向静止态转换就是通过挂起实现的。
引入挂起状态的原因有:
(1) 终端用户的请求。当终端用户在自己的程序运行期间发现有可疑问题时,希望暂时使自己的程序静止下来。亦即,使正在执行的进程暂停执行;若此时用户进程正处于就绪状态而未执行,则该进程暂不接受调度,以便用户研究其执行情况或对程序进行修改。我们把这种静止状态称为挂起状态。
(2) 父进程请求。有时父进程希望挂起自己的某个子进程,以便考查和修改该子进程,或者协调各子进程间的活动。
(3) 负荷调节的需要。当实时系统中的工作负荷较重,已可能影响到对实时任务的控制时,可由系统把一些不重要的进程挂起,以保证系统能正常运行。
(4) 操作系统的需要。操作系统有时希望挂起某些进程,以便检查运行中的资源使用情况或进行记账。
具有挂起状态的进程状态转换图为:
有关参考文章有:http://www.2cto.com/os/201412/358908.html
http://blog.chinaunix.net/uid-26126915-id-2948970.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)