KaliZr由ETHZ视觉组开源,链接如下:https://github.com/ethz-asl/kalibr
Kalibr可以解决以下校准问题:
1.多摄像机校准:具有非全局共享的重叠视场的摄像机系统的内部和外部校准。
2.视觉惯性校准(Camera-IMU):带相机系统的IMU的时空校准。
3.卷帘相机校准:卷帘相机的完整固有校准(投影,失真和快门参数)。
Kalibr工程有两种,一种是已经编译好的包,叫CDE package,另一种是未经编译的源文件。
前者:安装简单,不需要依赖ROS,但是功能不全。
后者:安装稍麻烦,但功能全,建议安装这种,基于ROS。
下面主要介绍后者安装和标定过程,这里以视觉惯性标定为例,下面有小觅相机标定测试。
1.Kalibr标定过程
1.1从源码安装工具箱
| sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu trusty main" > /etc/apt/sources.list.d/ros-latest.list' wget http://packages.ros.org/ros.key -O - | sudo apt-key add - sudo apt-get update sudo apt-get install ros-kinetic-desktop python-rosinstall python-rosdep -y rosdep init rosdep update |
1.2安装kalibr源码编译依赖项/库
| sudo apt-get install python-setuptools python-rosinstall ipython libeigen3-dev libboost-all-dev doxygen libopencv-dev ros-kinetic-vision-opencv ros-kinetic-image-transport-plugins ros-kinetic-cmake-modules python-software-properties software-properties-common libpoco-dev python-matplotlib python-scipy python-git python-pip ipython libtbb-dev libblas-dev liblapack-dev python-catkin-tools libv4l-dev —————— sudo pip install python-igraph --upgrade |
1.3创建工作空间
| mkdir -p ~/kalibr_workspace/src cd ~/kalibr_workspace source /opt/ros/kinetic/setup.bash catkin init catkin config --extend /opt/ros/kinetic catkin config --cmake-args -DCMAKE_BUILD_TYPE=Release |
1.4下载Kalibr并编译
| cd ~/kalibr_workspace/src
git clone https://github.com/ethz-asl/Kalibr.git
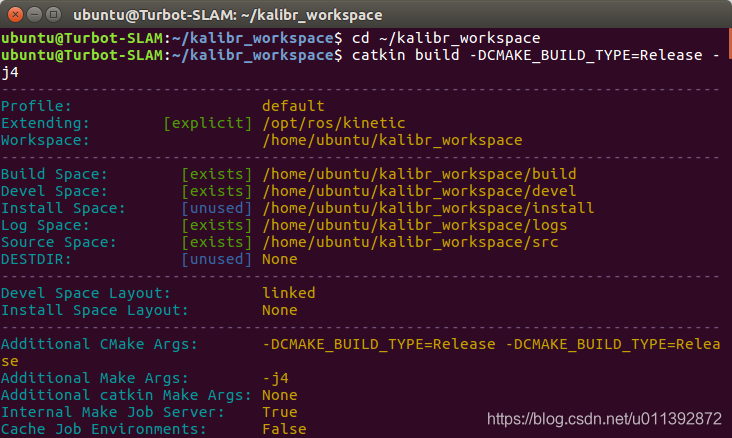
cd ~/kalibr_workspace
//以下开始编译,这里大概需要半个多小时
catkin build -DCMAKE_BUILD_TYPE=Release -j4(根据自己电脑配置调整数值) |
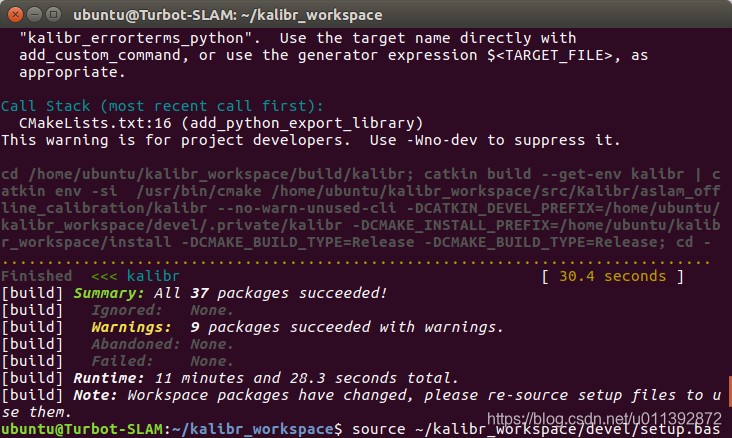
1.5设置环境
source ~/kalibr_workspace/devel/setup.bash
1.6验证安装是否成功
这里利用数据集的包进行标定验证,下面会用小觅相机采集数据进行标定,从https://pan.baidu.com/s/1bWQT7g提取码2g2t下载数据包,解压放在工作空间里
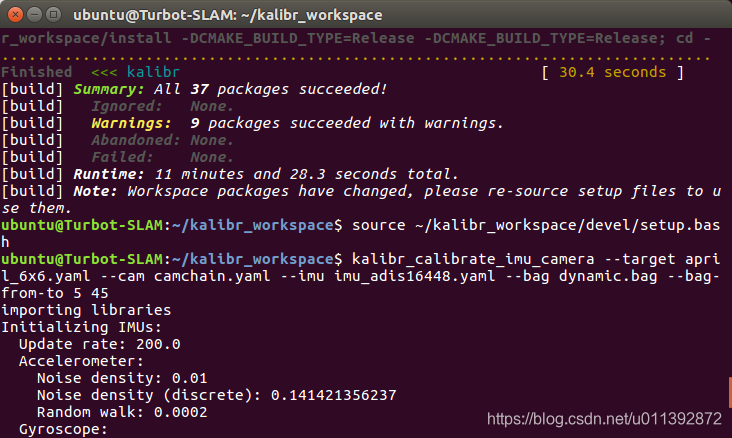
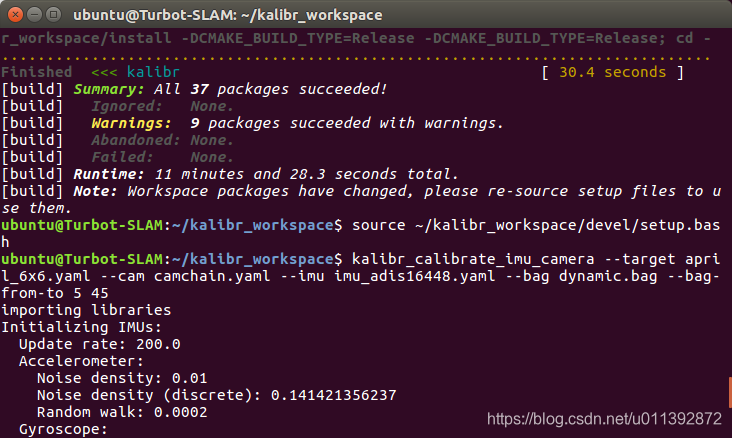
1.7开始标定
| 终端输入 kalibr_calibrate_imu_camera --target april_6x6.yaml --cam camchain.yaml --imu imu_adis16448.yaml --bag dynamic.bag --bag-from-to 5 45 |
标定结果:
results-imucam-%BAGNAME%.txt文件
results-imucam-%BAGNAME%.pdf文件
report-imucam-dynamic.txt
report-imucam-dynamic.pdf
2.小觅双目相机使用Kalibr标定
2.1.录制数据包
| 首先启动roscore 然后到MYNT-EYE-D-SDK目录下,运行命令:(运行小觅相机的驱动,使其将camera和IMU的数据以topic形式发布出来) source ./wrappers/ros/devel/setup.bash roslaunch mynteye_wrapper_d mynteye.launch |

开始录制数据包(这只是录制双目图像)
rosbag record -o 3.bag /mynteye/left/image_color /mynteye/right/image_color(没有降低录制帧率,默认采集帧率录制)

录制图像和IMU数据包:
rosbag record -o XX.bag /mynteye/left/image_color /mynteye/right/image_color /mynteye/imu/data_raw
准备好双目相机标定参数和imu标定参数文件
2.2.开始Camera-IMU联合标定
将四个文件放到kalibr_workspace工作空间中,包含图像和imu数据的bag文件、相机参数文件、IMU参数文件和标定板参数文件。
| source ~/kalibr_workspace/devel/setup.bash kalibr_calibrate_imu_camera --target april_6x6.yaml --cam camchain.yaml --imu imu_adis16448.yaml --bag dynamic.bag --bag-from-to 5 45 |
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)