文章目录
- 系列文章目录
- 前言
- 一、pandas是什么?
- 二、使用步骤
状态估计的概率解释:位姿x和路标y服从某种概率分布,目的是通过某些运动数据u(比如惯性测量传感器IMU输入)和观测数据z(比如拍摄到的照片像素点的值)来确定状态量x和y的分布。
首先我们回顾一下SLAM过程中的运动方程和观测方程:假设在t=0到t=N的时间内,有位姿 到
到 ,并且有路标
,并且有路标 ,则可以写成数学模型为:
,则可以写成数学模型为:

1.值得注意的是在运动方程中(可以理解为机器人从k-1时刻到k时刻,位置x的变化)uk是运动传感器的数据的输入,wk为该过程中加入的噪声。当机器人在xk位置上看到某个路标yi时,产生了一个观测数据 (即观测数据依赖位置与路标),
(即观测数据依赖位置与路标), 为观测噪声.虽然这个很简单,但所有的工作围绕这个方程展开的,所以再提一遍。
为观测噪声.虽然这个很简单,但所有的工作围绕这个方程展开的,所以再提一遍。
2.在观测方程中,只有在 看见了
看见了 时,才会产生观测数据,否则就没有,事实上在某一位置特征点的数量众多,实际中观测方程会远远大于运动方程。
时,才会产生观测数据,否则就没有,事实上在某一位置特征点的数量众多,实际中观测方程会远远大于运动方程。
由于位姿和路标点是待估计量,我们令为k时刻所有的未知量,他包含了相机位姿和m个路标: ,同时k时刻所有的观测数据为
,同时k时刻所有的观测数据为 则:
则:

第k时刻是,我们希望用过去0到k时刻中的数据来估计现在的状态分布:

根据贝叶斯法则有:

对于前面非线性优化忘了的,感觉一头雾水。我们可以先从根源了解一下贝叶斯法则:
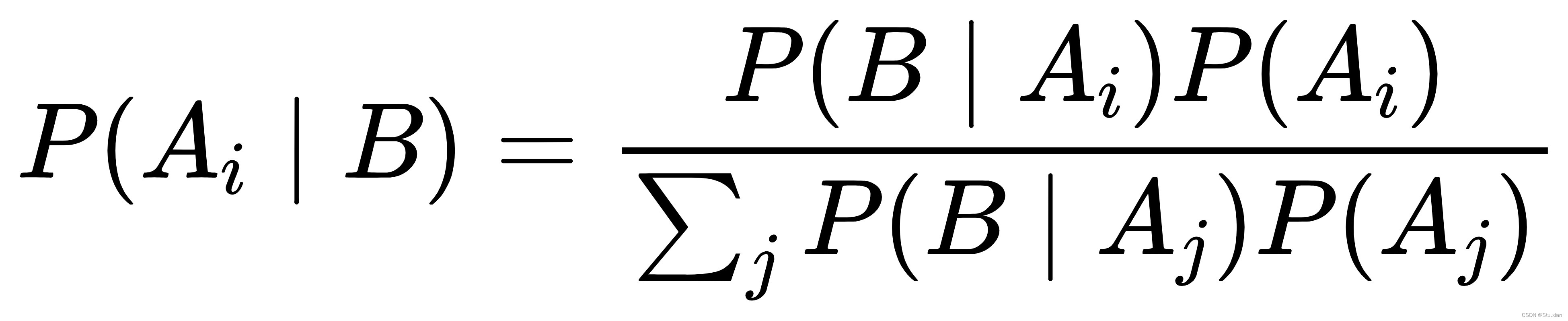
这时我们先看一下上式子所包含的意义:

这里根据贝叶斯公式直观看书上应该简化了,让人很难容易理解,中间应该有一部分。具体我也是参考这个博主
SLAM14讲学习笔记(六)后端(最难一章:卡尔曼滤波器推导、理解以及扩展)
![P\left(\boldsymbol{x}_{k} \mid \boldsymbol{x}_{0}, \boldsymbol{u}_{1: k}, \boldsymbol{z}_{1: k}\right) \]() 后验:根据0~k时刻所有的数据,来得到当前的状态。
后验:根据0~k时刻所有的数据,来得到当前的状态。
 似然:给定了一个先验Xk的情况下,什么观测数据Zk最能符合这个先验“的概率。(由观测方程可得)
似然:给定了一个先验Xk的情况下,什么观测数据Zk最能符合这个先验“的概率。(由观测方程可得)
 先验 :是根据0~k-1时刻的观测数据,推测得知k时刻的先验状态(对于这个,里面的u作为一个传感器数据,其实可以忽略掉它,因为0~k-1时刻的数据不应该包含uk,但是本书里面着重要讲的是视觉SLAM,u应该指的是惯性逻辑单元IMU之类的数据,如果只依靠观测的图像来判断状态的话,忽略掉u就行了)
先验 :是根据0~k-1时刻的观测数据,推测得知k时刻的先验状态(对于这个,里面的u作为一个传感器数据,其实可以忽略掉它,因为0~k-1时刻的数据不应该包含uk,但是本书里面着重要讲的是视觉SLAM,u应该指的是惯性逻辑单元IMU之类的数据,如果只依靠观测的图像来判断状态的话,忽略掉u就行了)
后验概率 = 似然 * 先验。
以k-1时刻为条件概率展开: 
全概率公式
我们现在考虑的是渐进式问题,即k时刻的状态与k-1时刻状态有关(马尔科夫性质)。这样我们就可以得到扩展卡尔曼滤波(EKF)为代表的滤波器方法。
当前时刻状态只和上一个时刻有关,右侧(指的是那个积分)第一部分可进一步简化:

这里,由于k时刻状态与k-1之前的无关,所以就简化成只与k-1和 uk有关的形式,与k 时刻的运动方程对应。第二部分可简化为

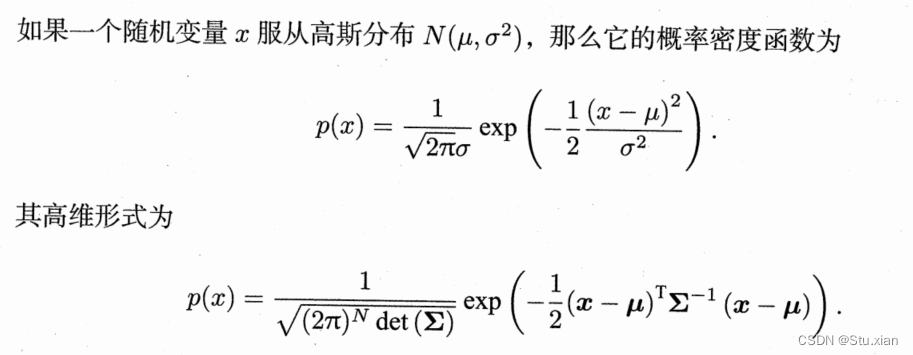
先假设状态量都服从高斯分布,扩展卡尔版滤波是非线性的,在此之前我们首先线性的卡尔曼滤波谈起,线性高斯是指运动方程和观测方程可以由线性来描述:

并假设这里的噪声服从零均值高斯分布:

考虑随机变量 ,另一变量y满足:
,另一变量y满足:

其中A,b为线性变量的系数矩阵和偏移量, w为噪声项,为零均值的高斯分布 。
。

现在,利用马尔可夫性,假设我们知道了k -1时刻的后验(在k-1时刻看来)状态估计ag-1及其协方差P-1,现在要根据k时刻的输入和观测数据,确定x的后验分布。为区分推导中的先验和后验,
以上帽子cx。表示后验,以下帽子c表示先验分布,
卡尔曼滤波器第一步,通过运动方程确定 的先验分布(线性):

这一步称为预测,它显示了如何从上一个时刻的状态,根据输入信息(但有噪声)推断当前时刻的状态分布,这个分布也就是先验。记:

由观测我们可以计算在某个状态改下应该产生怎样的观测数据:

此时我们根据公式来推出后验,假设后验的概率分布为 ,则:
,则:

已知等式两侧都是高斯分布,那么只需比较指数分布,无需理会前面的因子部分。 (由附录A.1)
现在我们将指数部分展开,有:

1.这时突然出现 和 ,公式太多会有点分不清楚了:
和 ,公式太多会有点分不清楚了:
(遗留问题)
2.这里我们捋一下怎么推导过来的,第一次我也没怎么看懂。可以表示任意状态,我们在前面定义了路标和位姿,在k时刻这个状态是服从高斯分布的。为它的均值(这里表示后验) 为它的协方差(后验)。
为它的协方差(后验)。
然后对公式进一步推导:

现在我们整理一次项和二次项,对于二次系数我们可得到:

该式给出了协方差的计算过程。为了便于后面列写式子,定义一个中间变量:


于是就有:

同理比较一次项系数,有:

整理(取系数并转置)得

在整理得到:

此时我们就得到了后验均值的表达。根据书上我们再总结一下:
1.预测:

2.更新,先计算K,又称为卡尔曼增益:

然后计算后验概率分布:

至此我们推导了经典的卡尔曼滤波器的整个过程。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)